很容易的,现学现用:
理解本质之后,这里是直接可以套公式的
一、无速度约束,三项插值的方法:

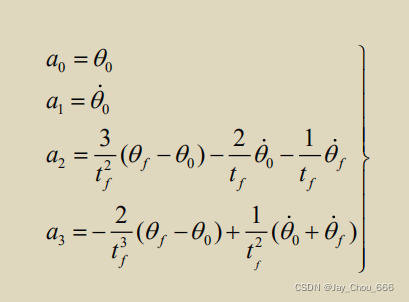
a是多项式的系数,a0是t_0的系数,a1是t_1的系数
θ0是一开始的角度,θf是最终的角度,tf是最终的时间
举例:
给出必要的值,比如 θ0=-5,θf=80,tf=4套公式之后a0=-5,a1=0,a2=15.9375,a3=-2.6563

二、有速度约束,三项插值的方法:
用法和上面一样的
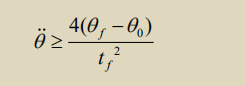
三、有加速度、速度约束,高阶插值的方法:

用法和上面一样的
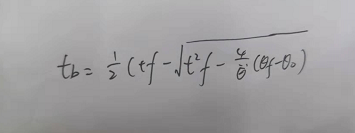
以上介绍的方法简单粗暴,应用挺简单的,但有一个缺点就是会导致速度或者加速度的曲线不平滑,换句话来说就是会出现跳跃,在一瞬间突然发力或者乏力,导致机器人行动一卡一卡的,所以下面介绍的是抛物线,也就是把角给抹平,让曲线纵享丝滑。
版权声明:本文为Jay_Chou_666原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。