本篇博客将使用gazebo对我们的机器人进行仿真。首先确保已经将上一篇博客所提到的代码拷贝到对应的文件夹下。
写在前面
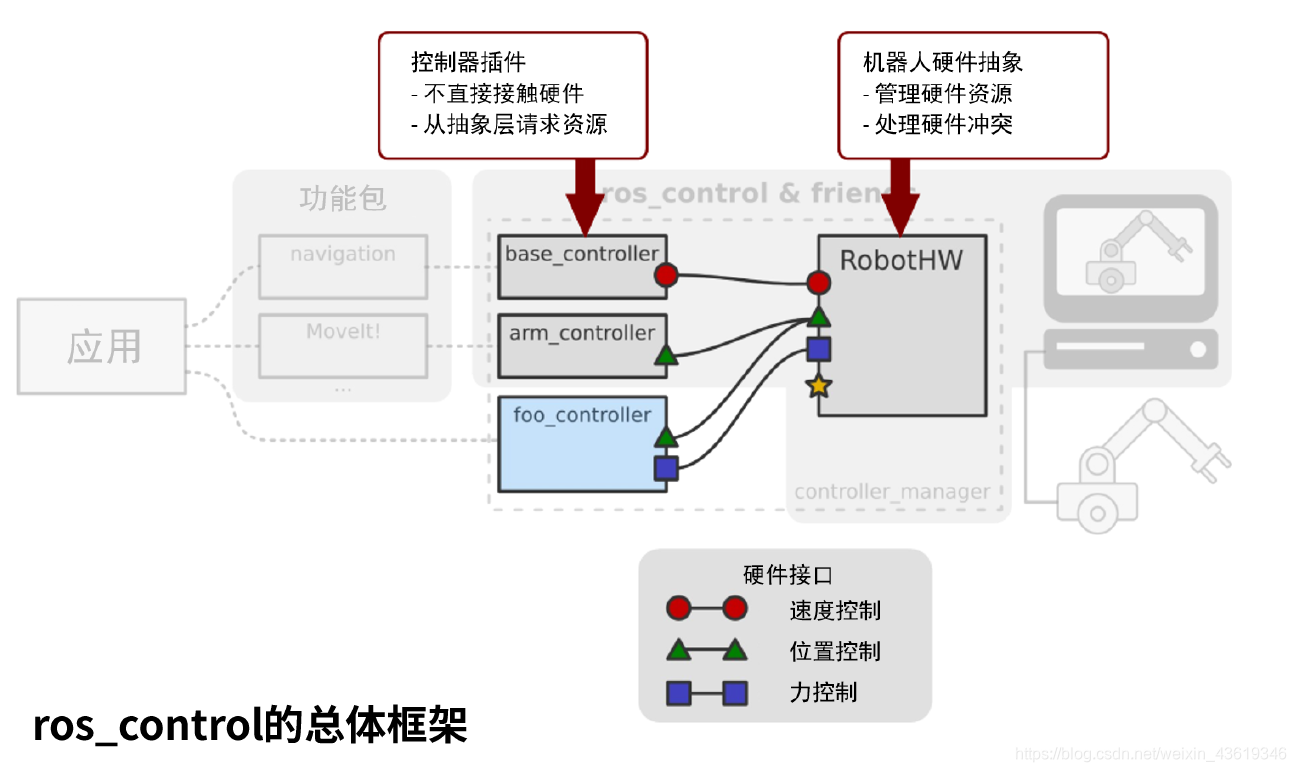
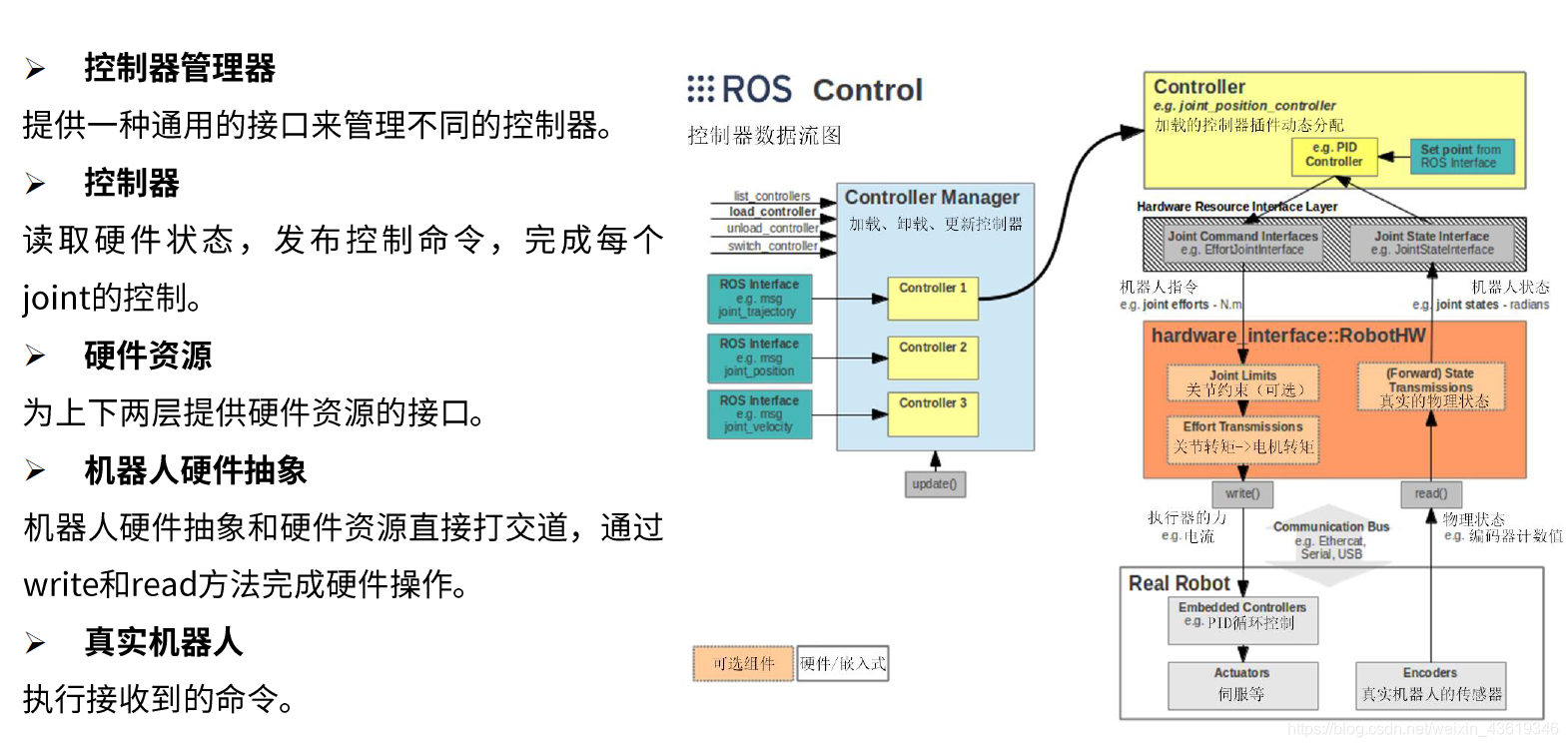
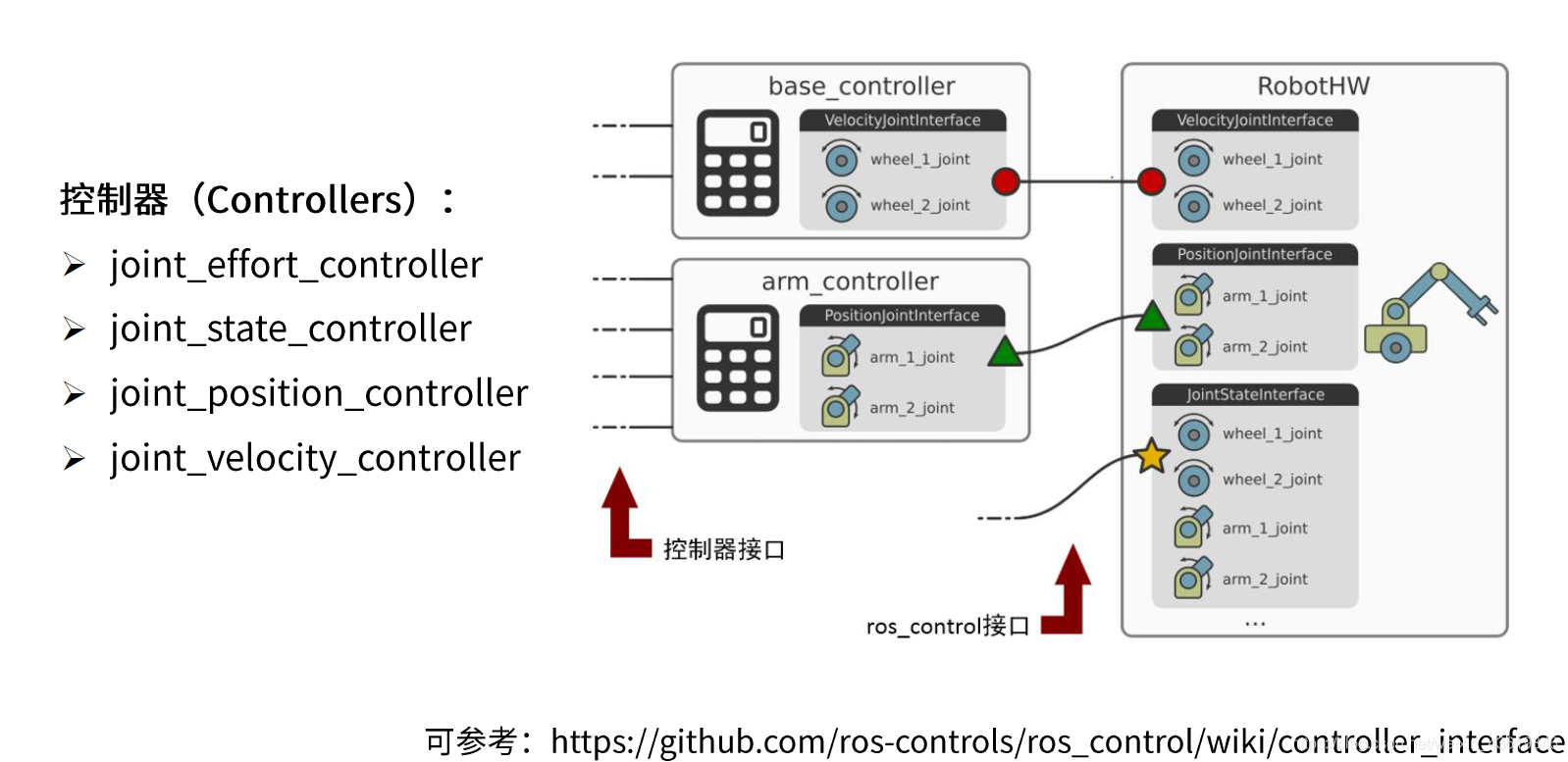
首先介绍一个功能包:ros_control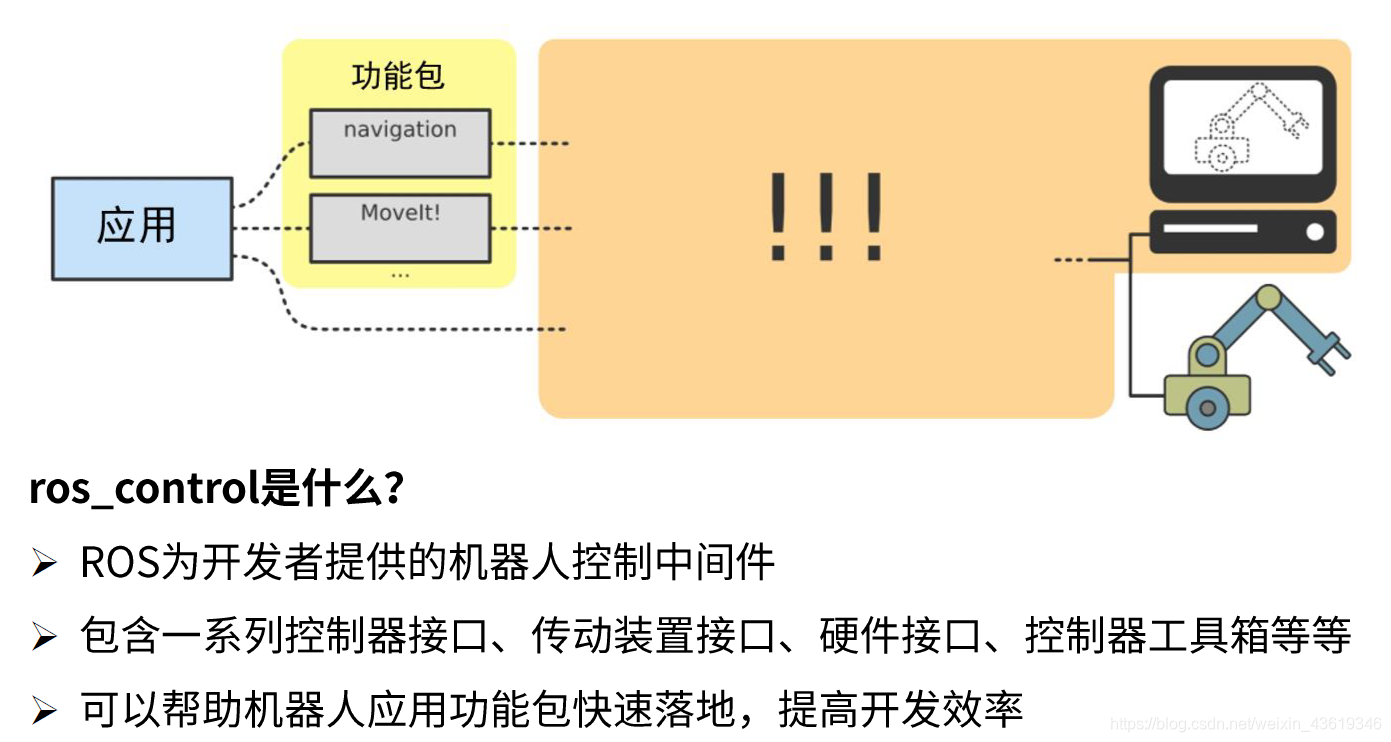
常见的四种控制器:
- 力控制
- 关节状态控制
- 位置控制
- 速度控制
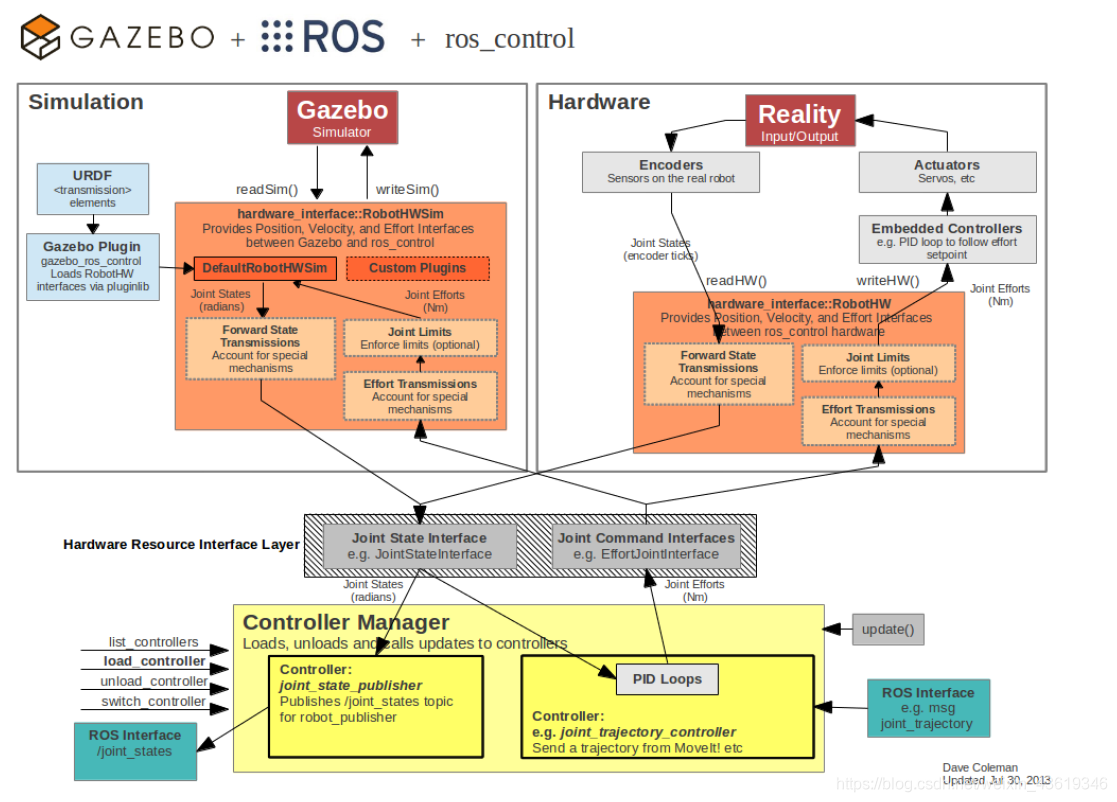
gazebo物理仿真步骤
配置机器人模型
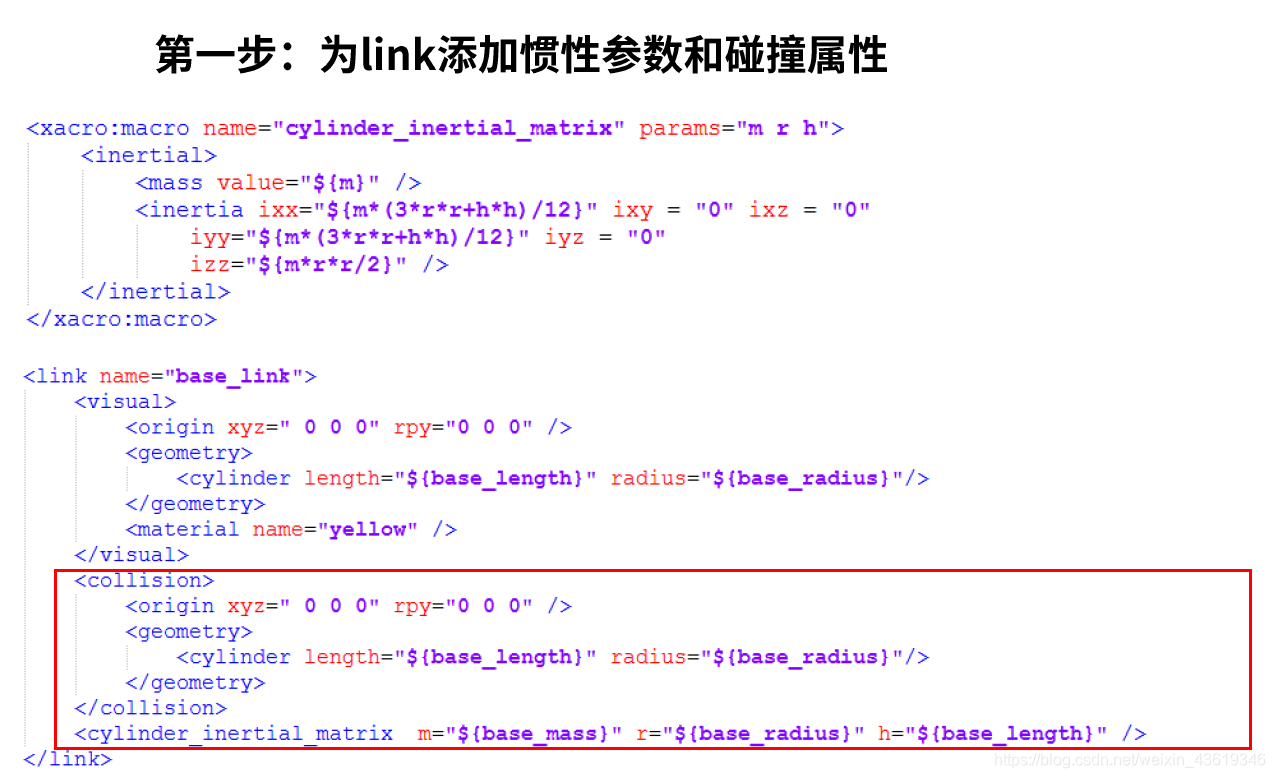
为每个link添加惯性参数以及碰撞参数
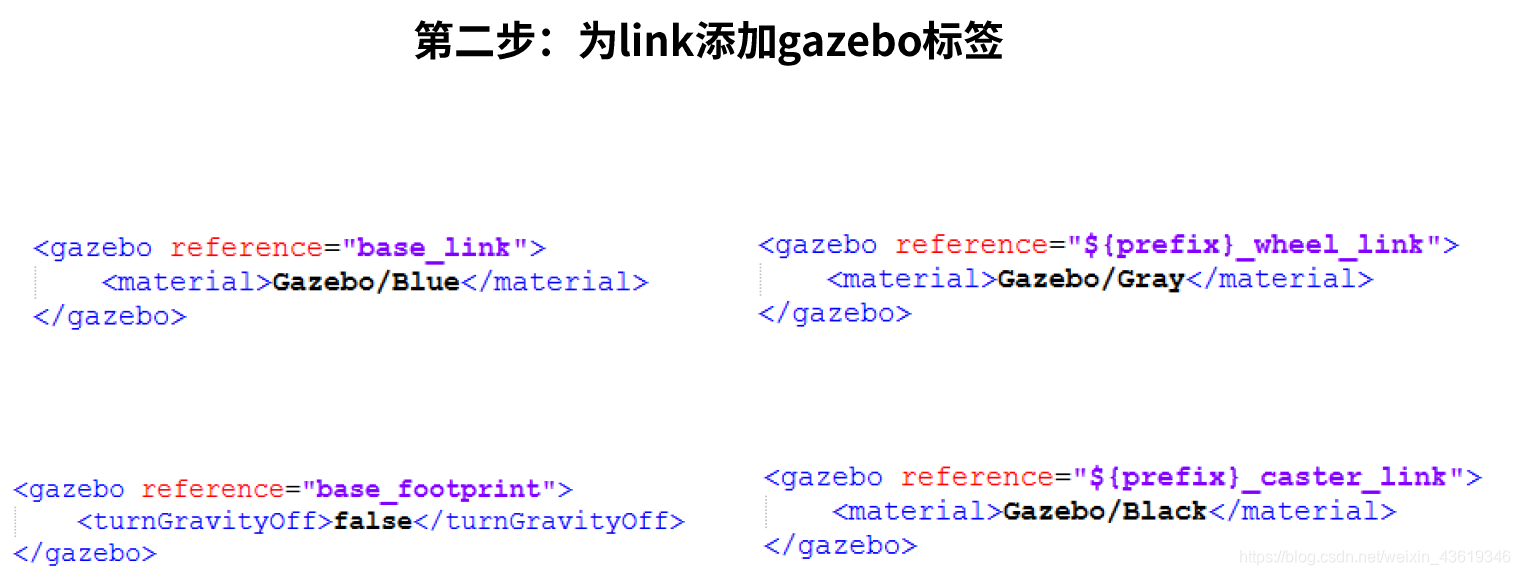
为每个link添加gazebo标签
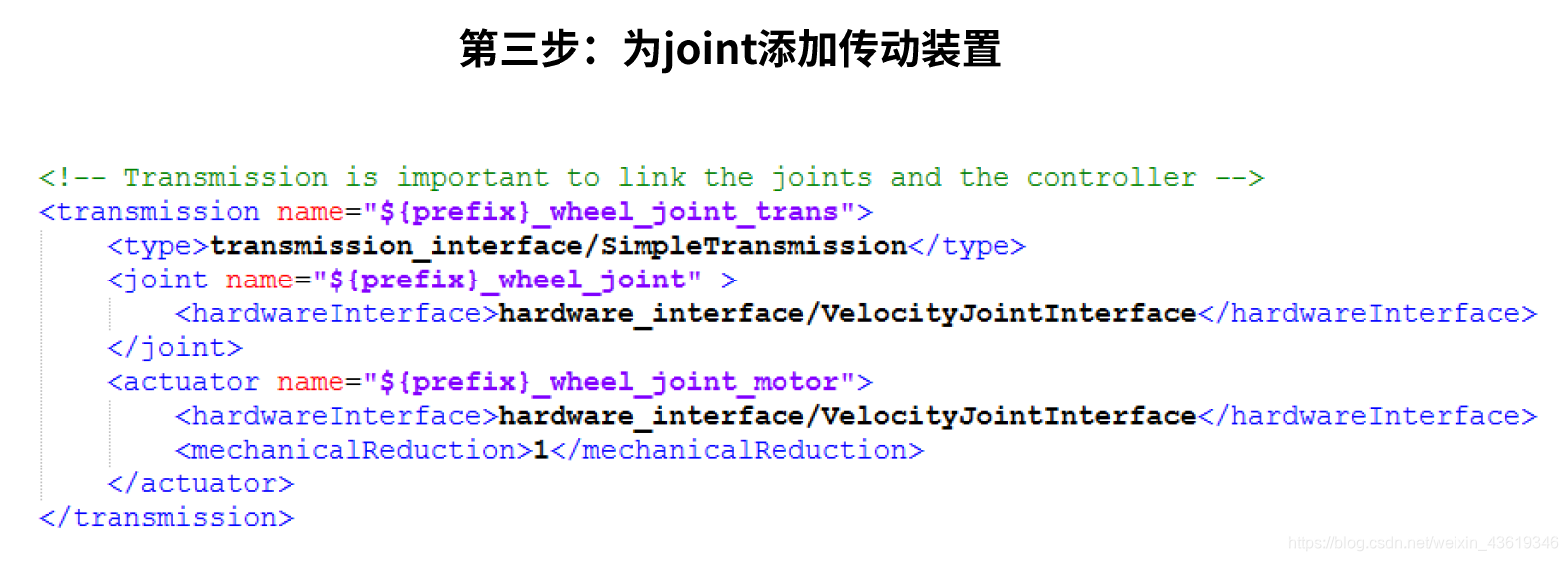
为能动的joint添加传动和动力装置
添加控制器插件
相关设置可以在gazebo官网找到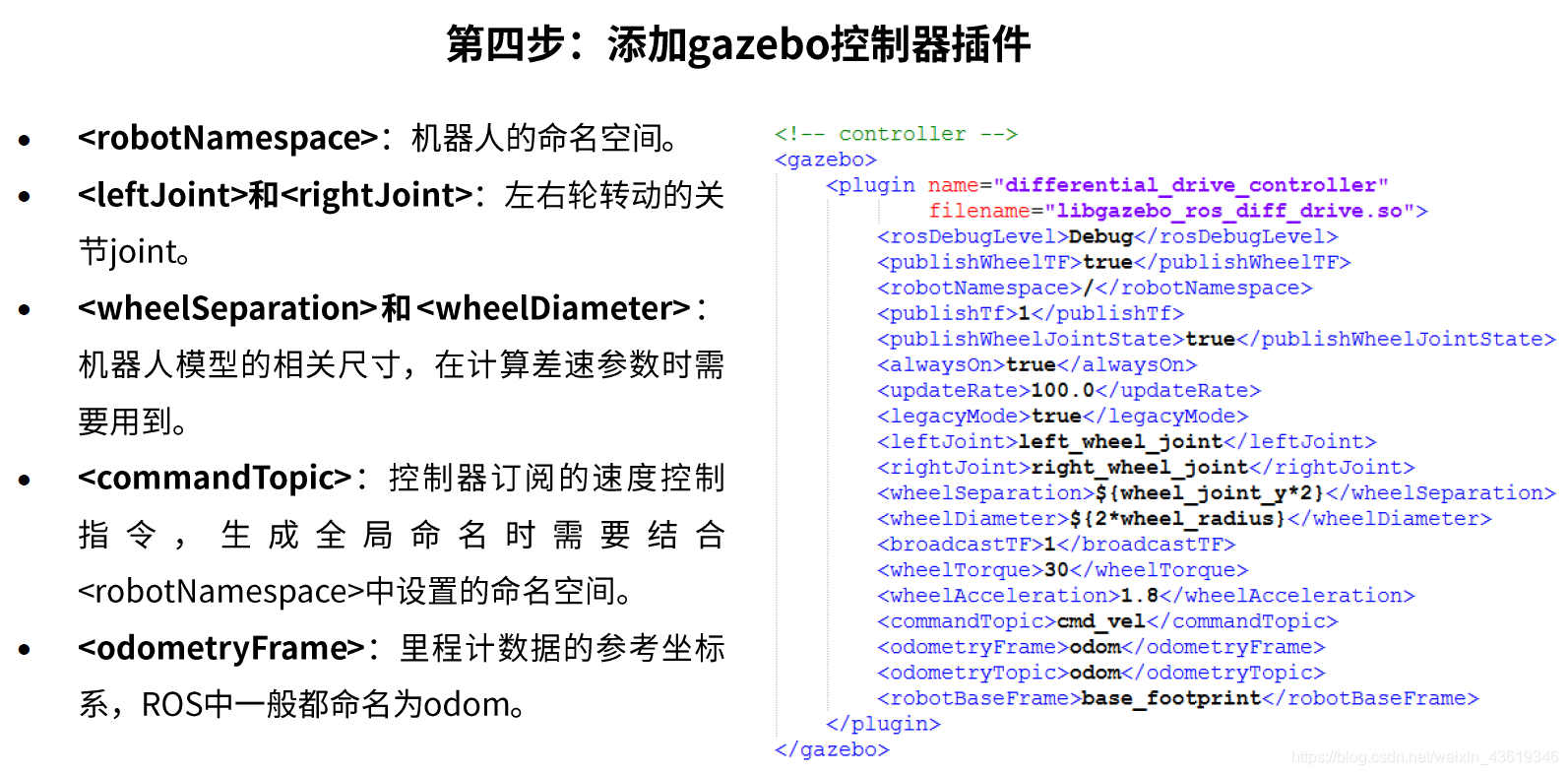
创建仿真环境
需要关注的两个重点:
- 设置模型的路径
- 加载机器人模型的方法:spawn_model节点
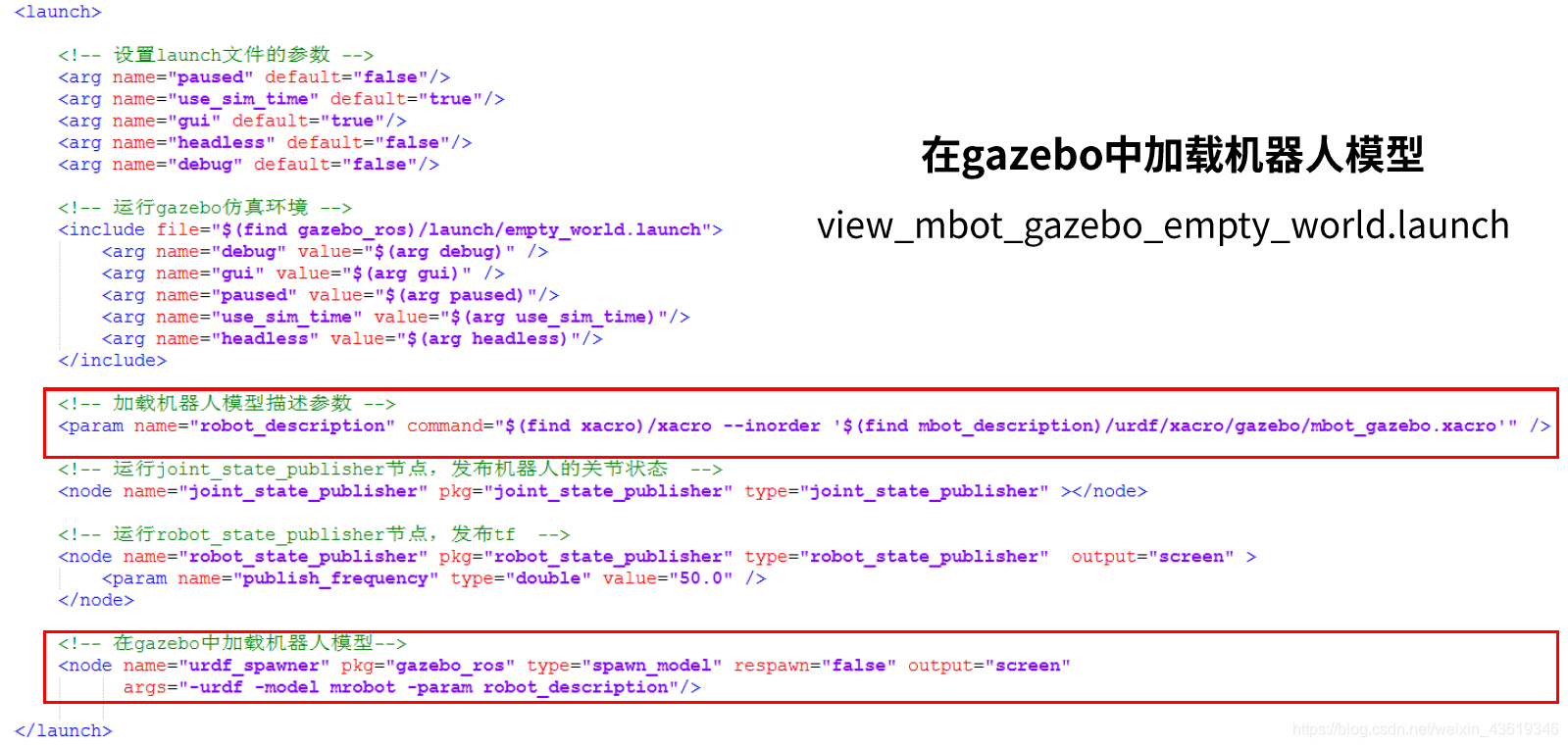
运行下面的命令:
roslaunch mbot_gazebo view_mbot_gazebo_empty_world.launch
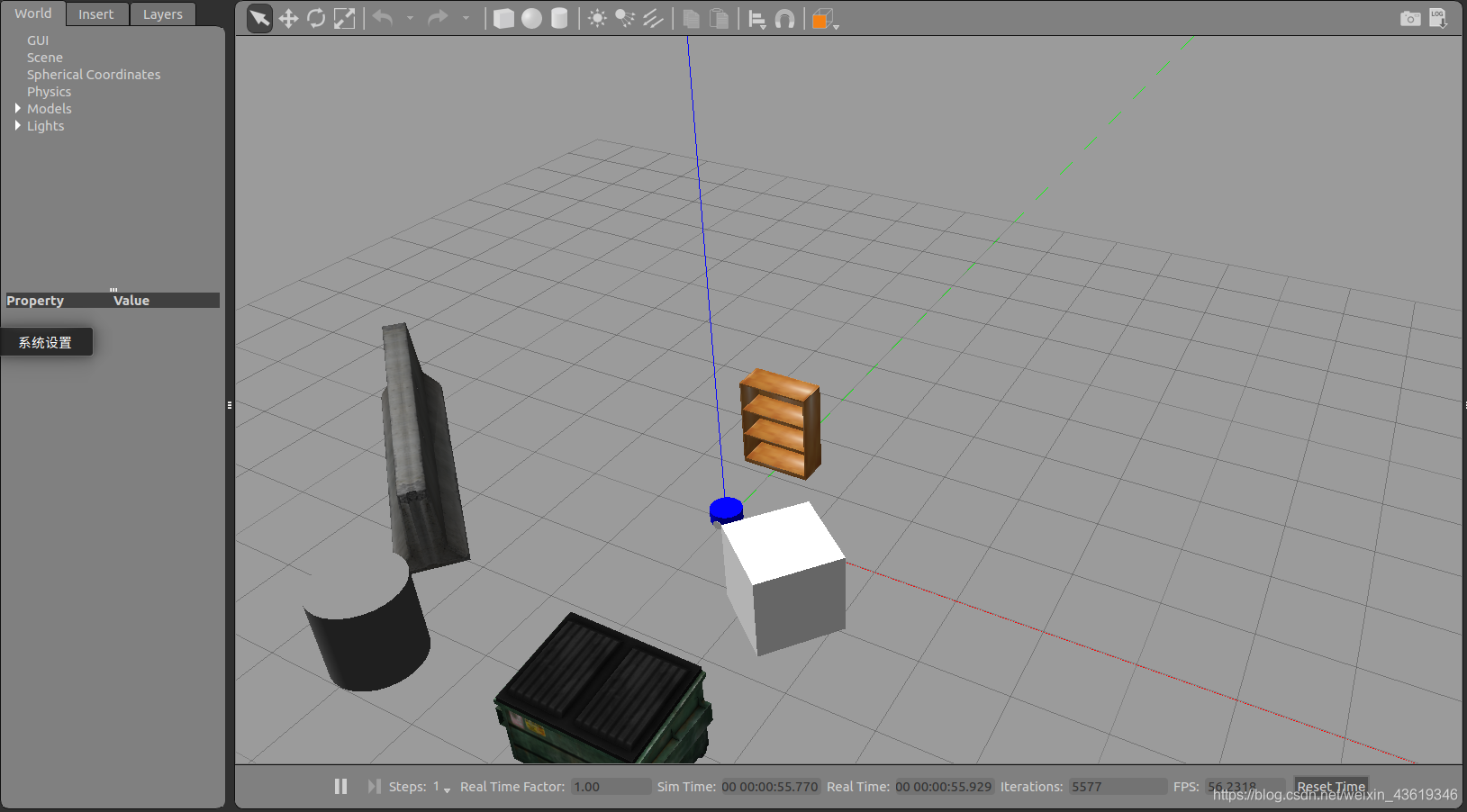
查看空环境中的机器人: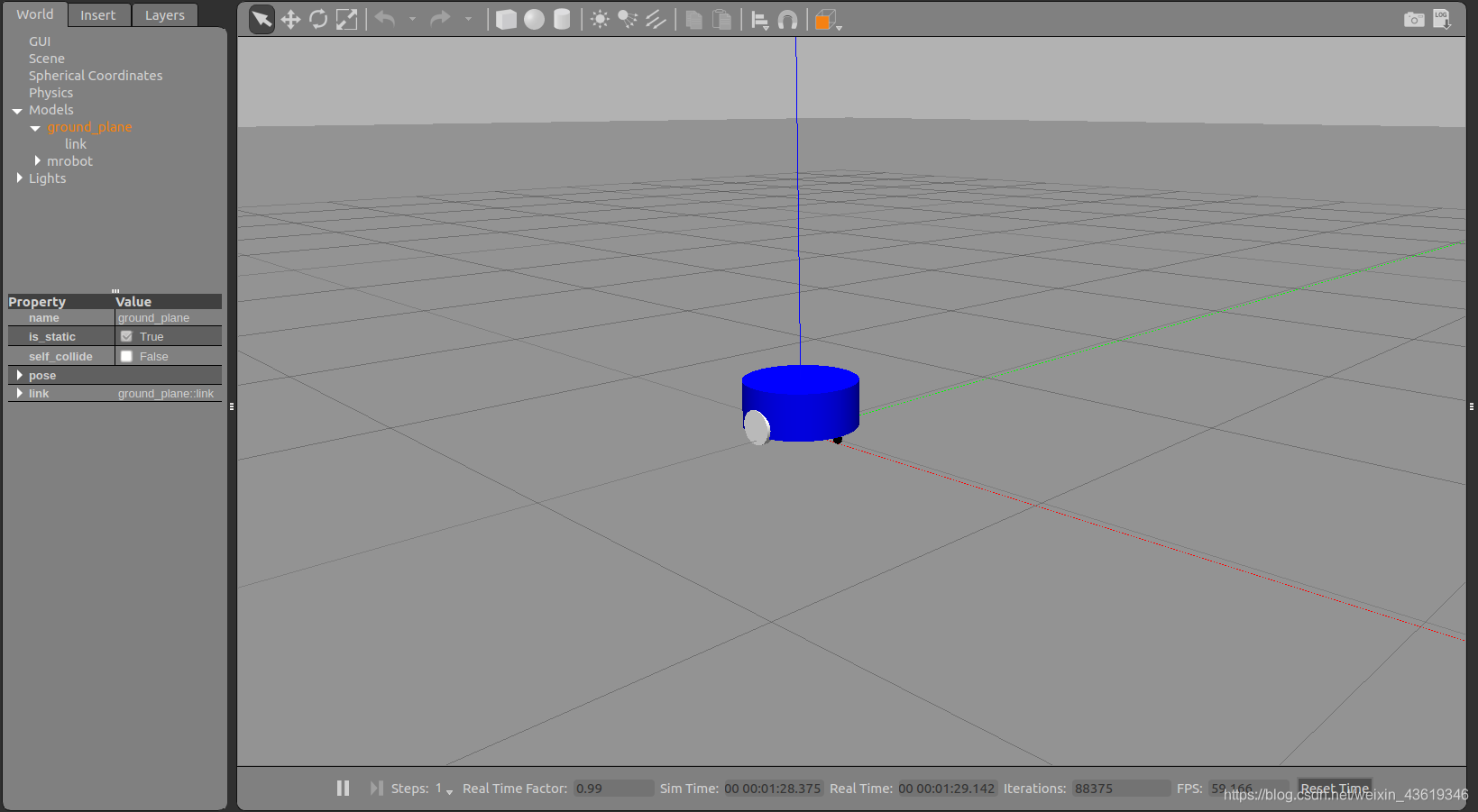
如果出现gazebo加载慢的情况,就事先下载好模型放进对应的文件夹中:模型下载
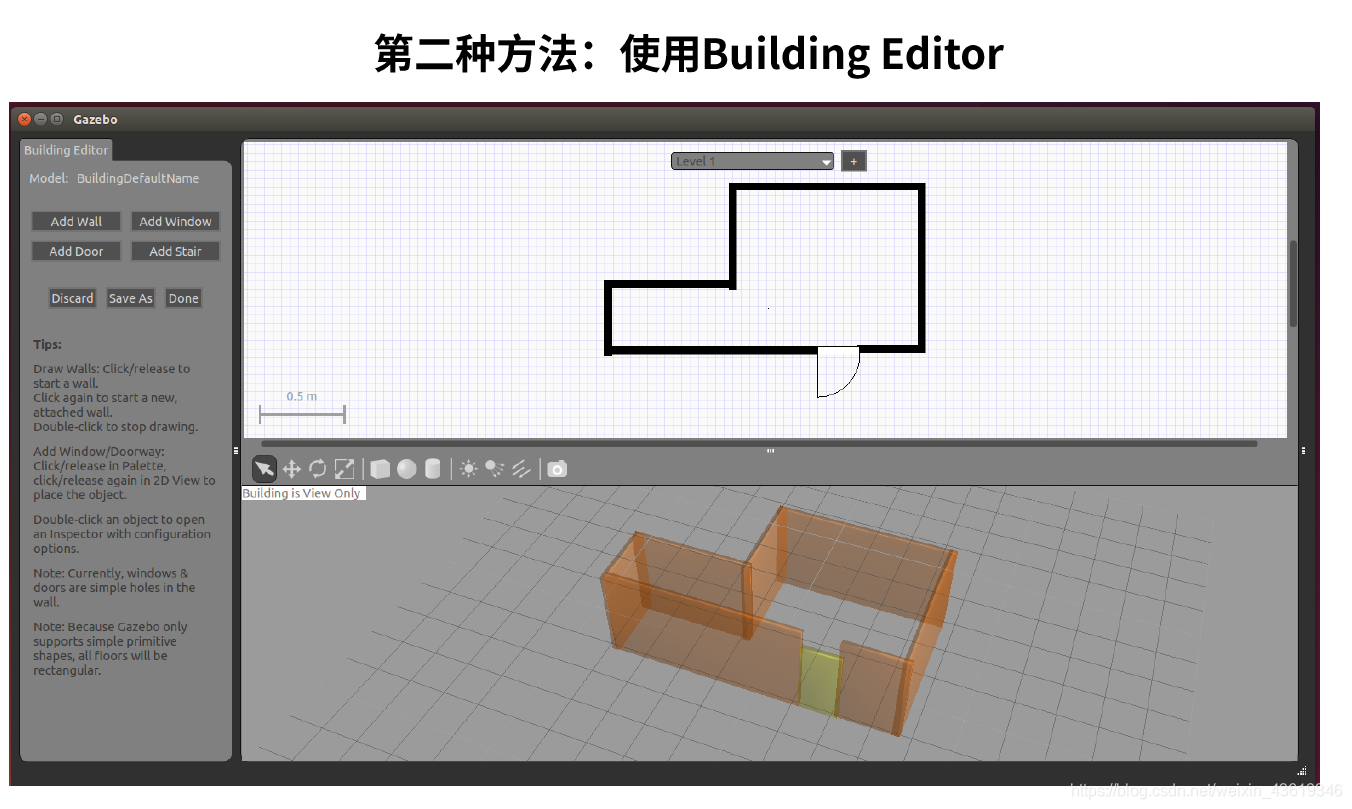
创建仿真环境的两种方法: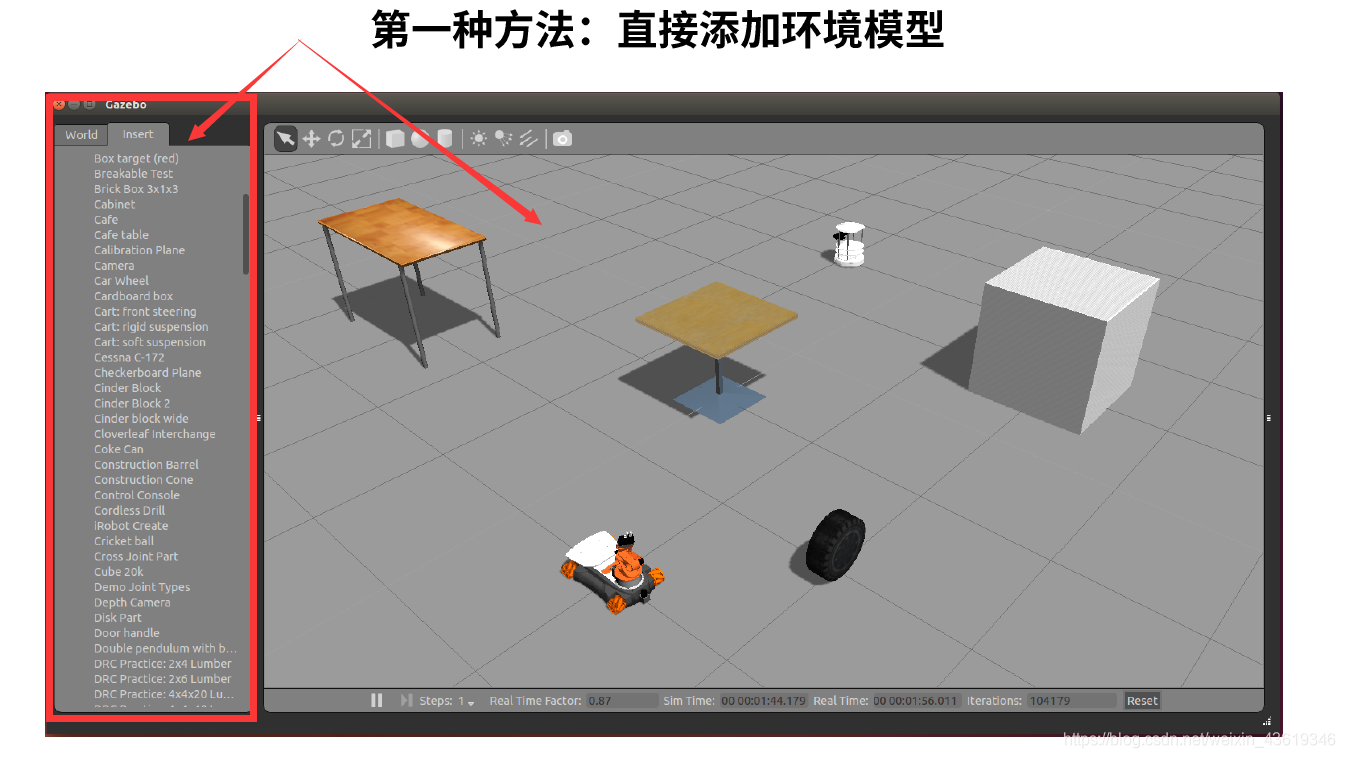
开始仿真
roslaunch mbot_gazebo view_mbot_gazebo_play_ground.launch
启动键盘控制:
roslaunch mbot_teleop mbot_teleop.launch
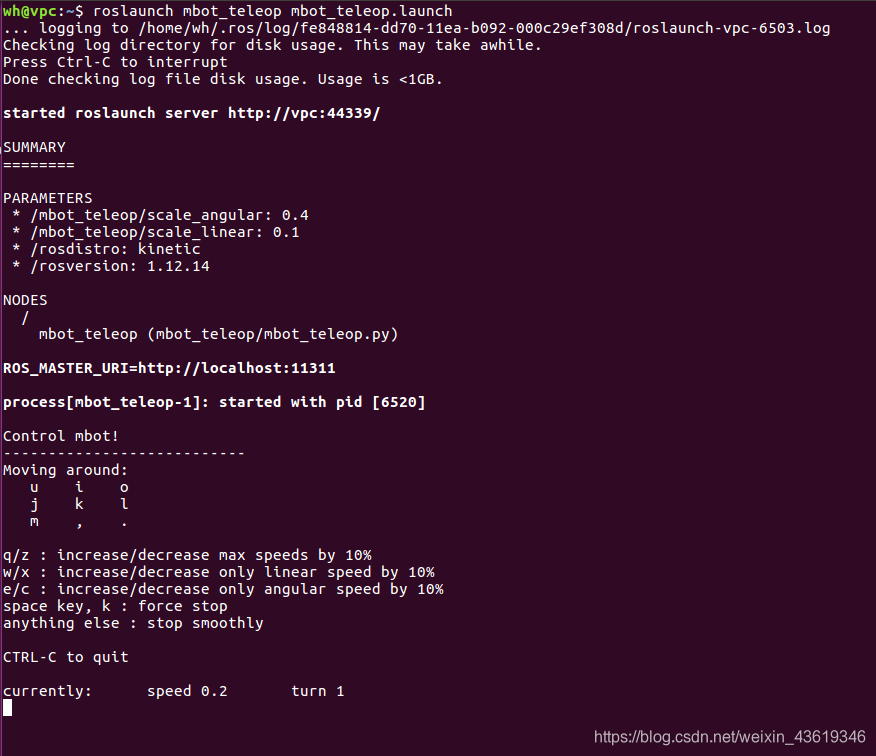
控制键位说明:
i:前进,:后退j:左转l:右转k:急停u:前进左转o:前进右转m:后退左转.:后退右转
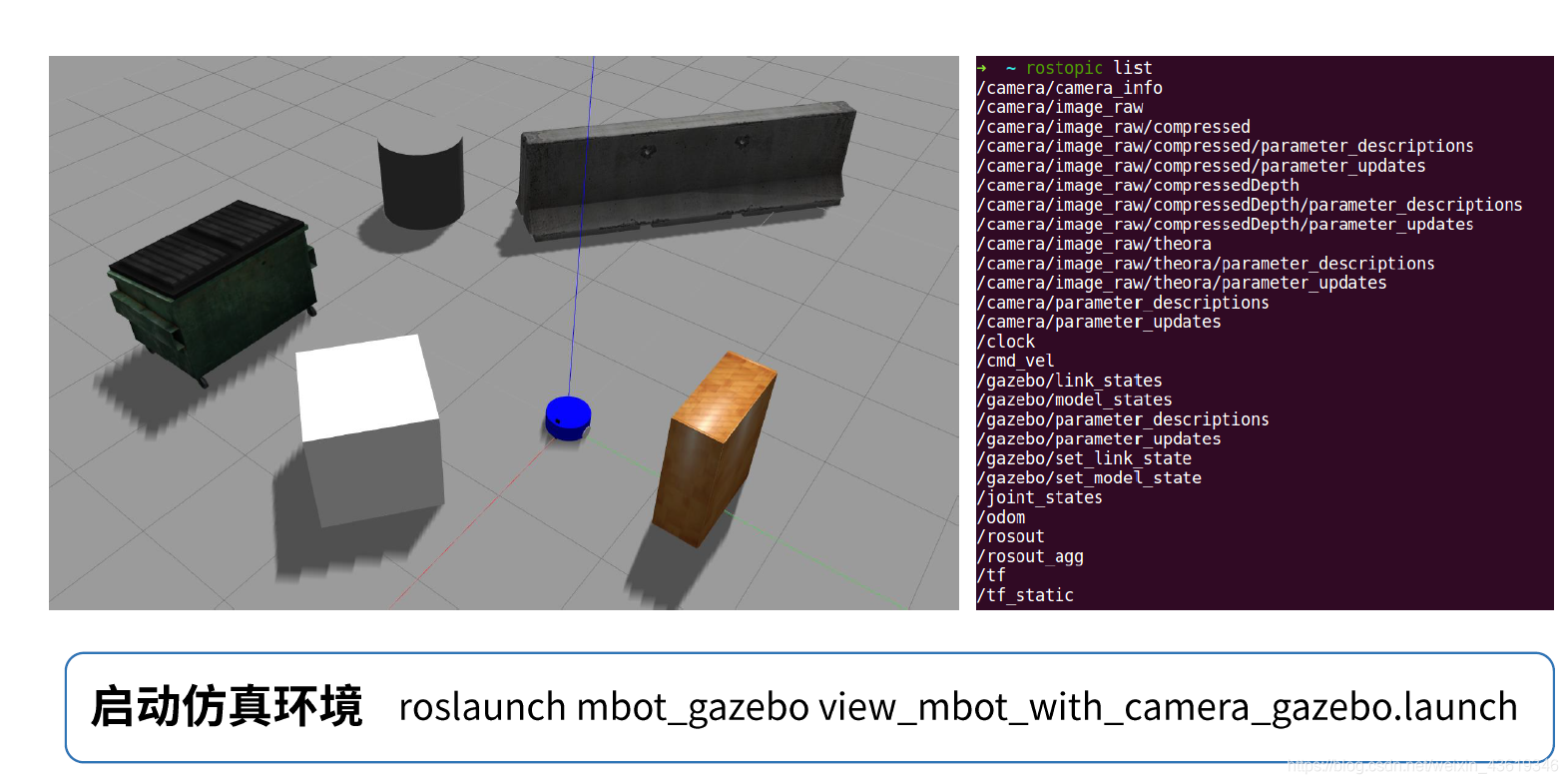
看一下rostopic列表: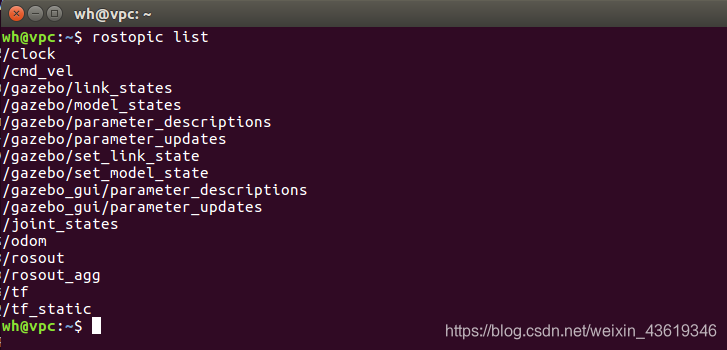
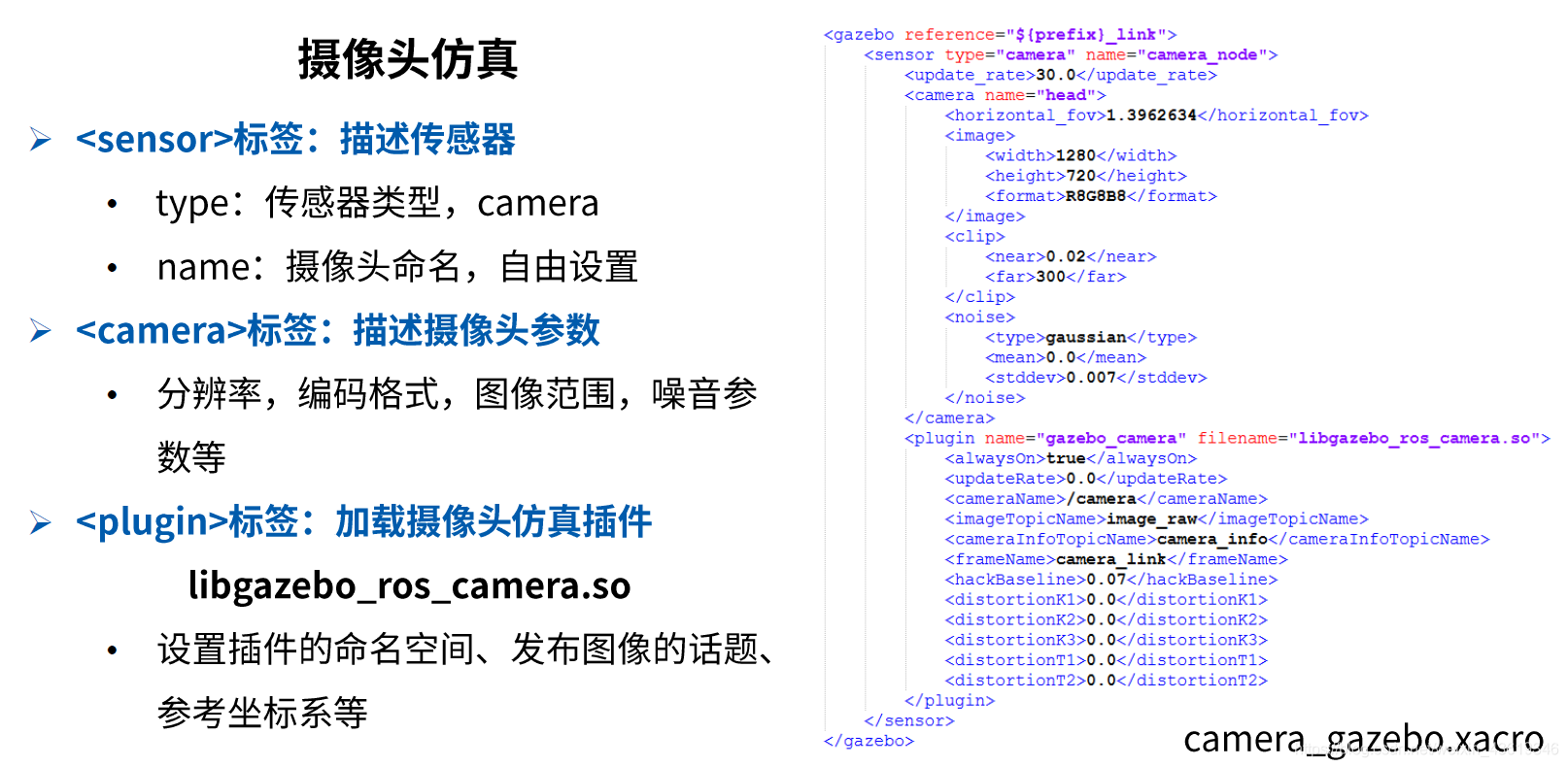
摄像头仿真
<sensor>标签:描述传感器type:传感器类型:cameraname:摄像头命名,自由设置
<camera>标签:描述摄像头参数- 分辨率
- 编码格式
- 图像范围
- 噪音参数
<plugin>标签:加载摄像头仿真插件libgazebo_ros_camera.so- 设置插件的命名空间
- 发布图像的话题
- 参考坐标系
查看摄像头仿真图像 rqt_image_view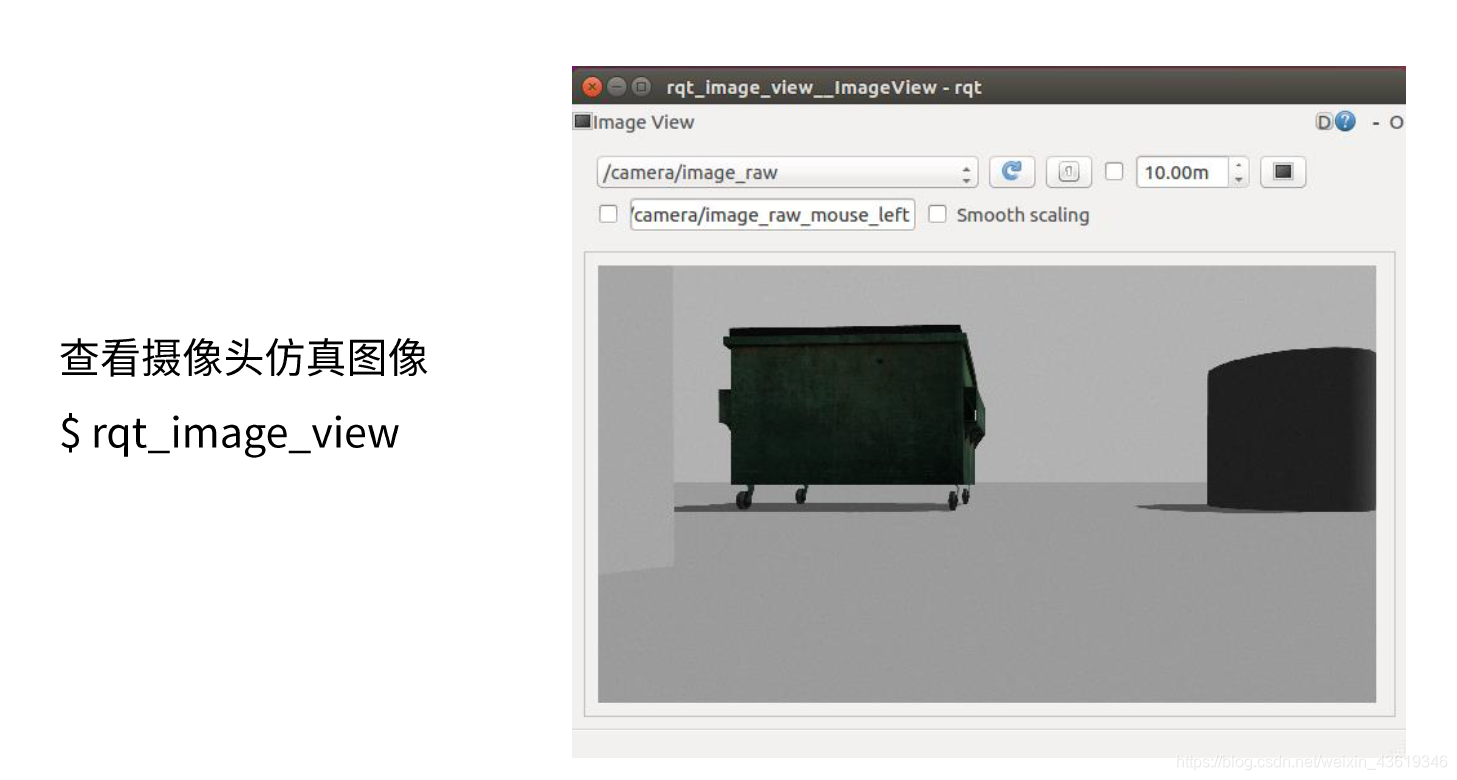
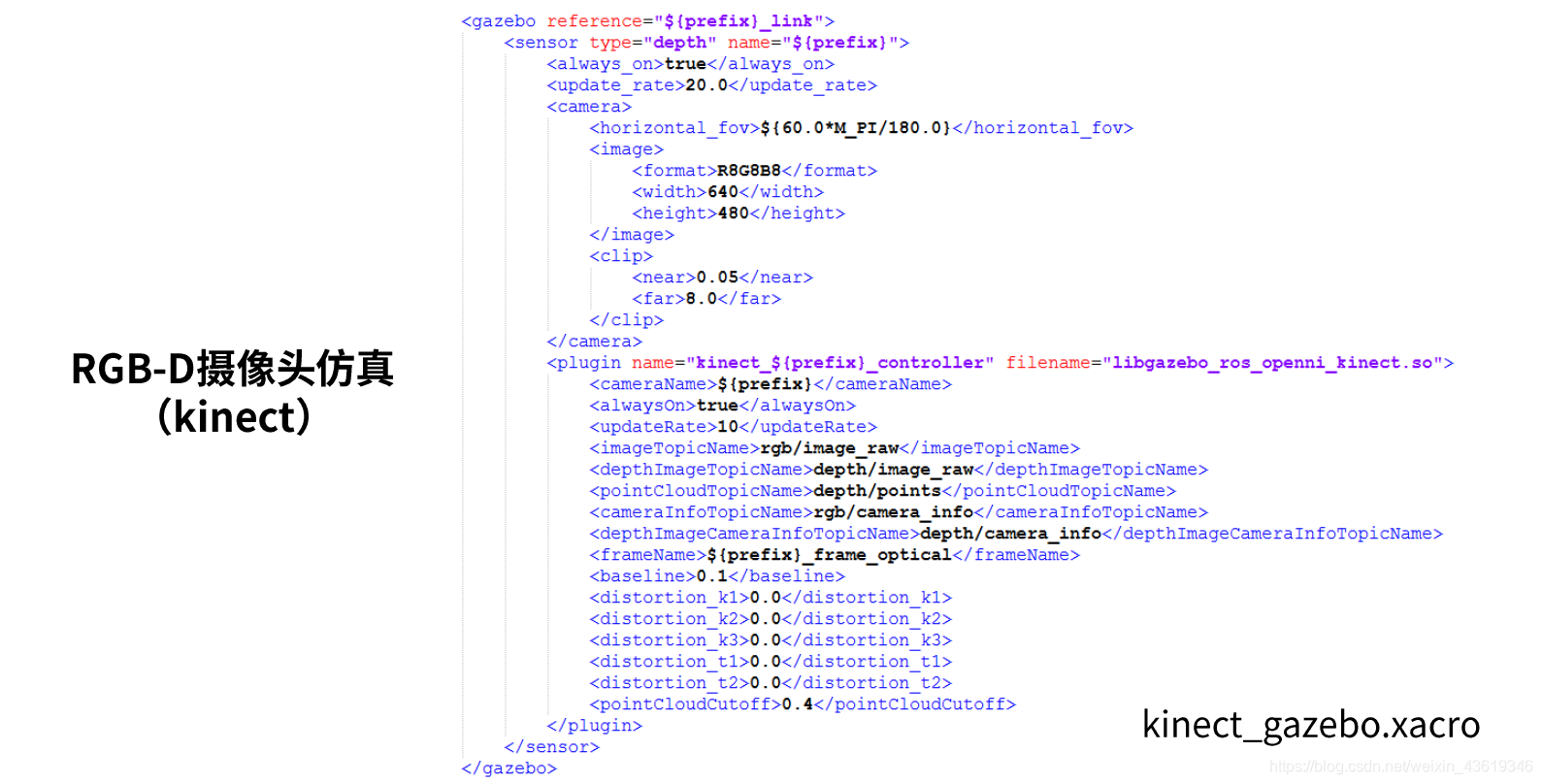
启动仿真环境:roslaunch mbot_gazebo view_mbot_with_kinect_gazebo.launch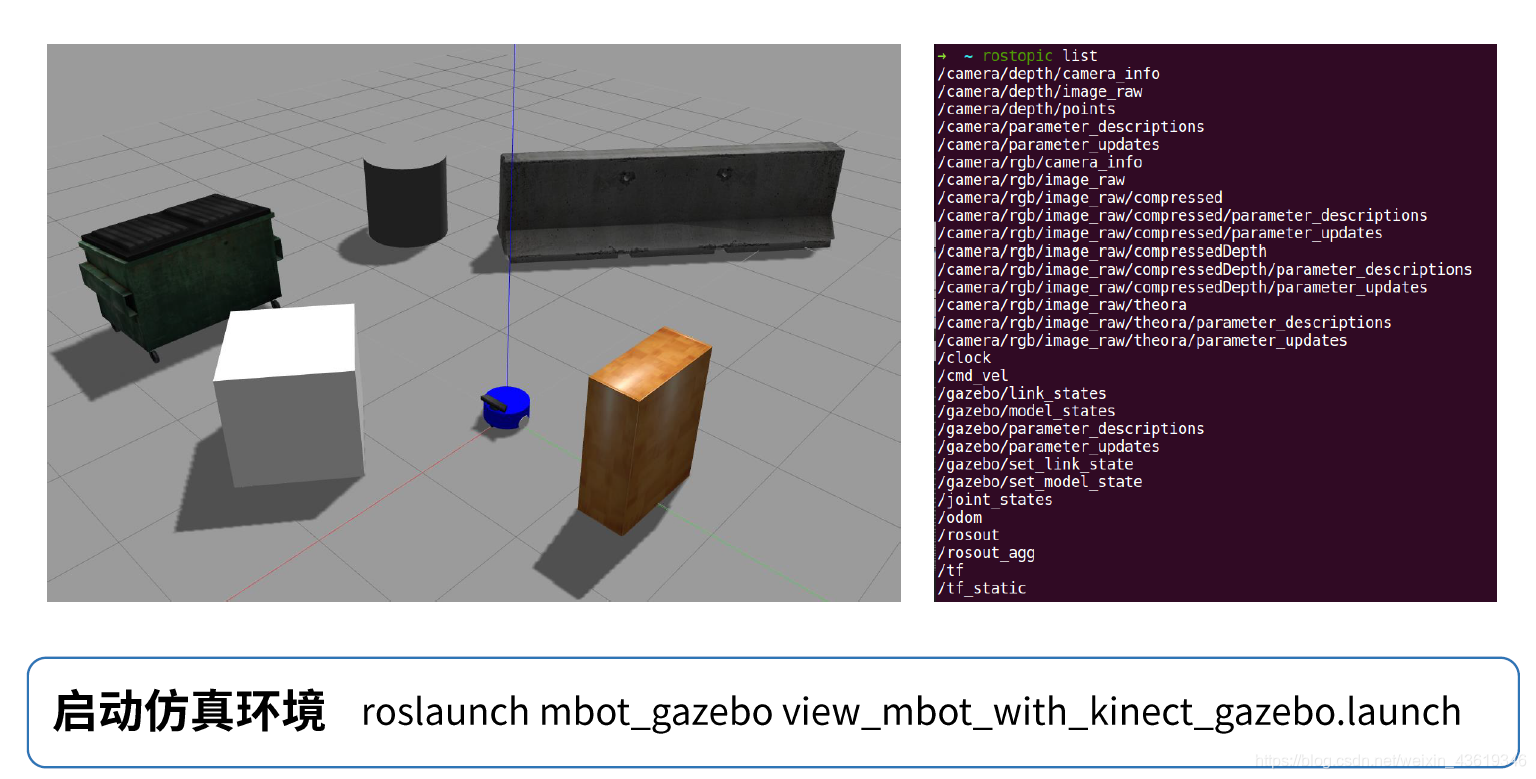
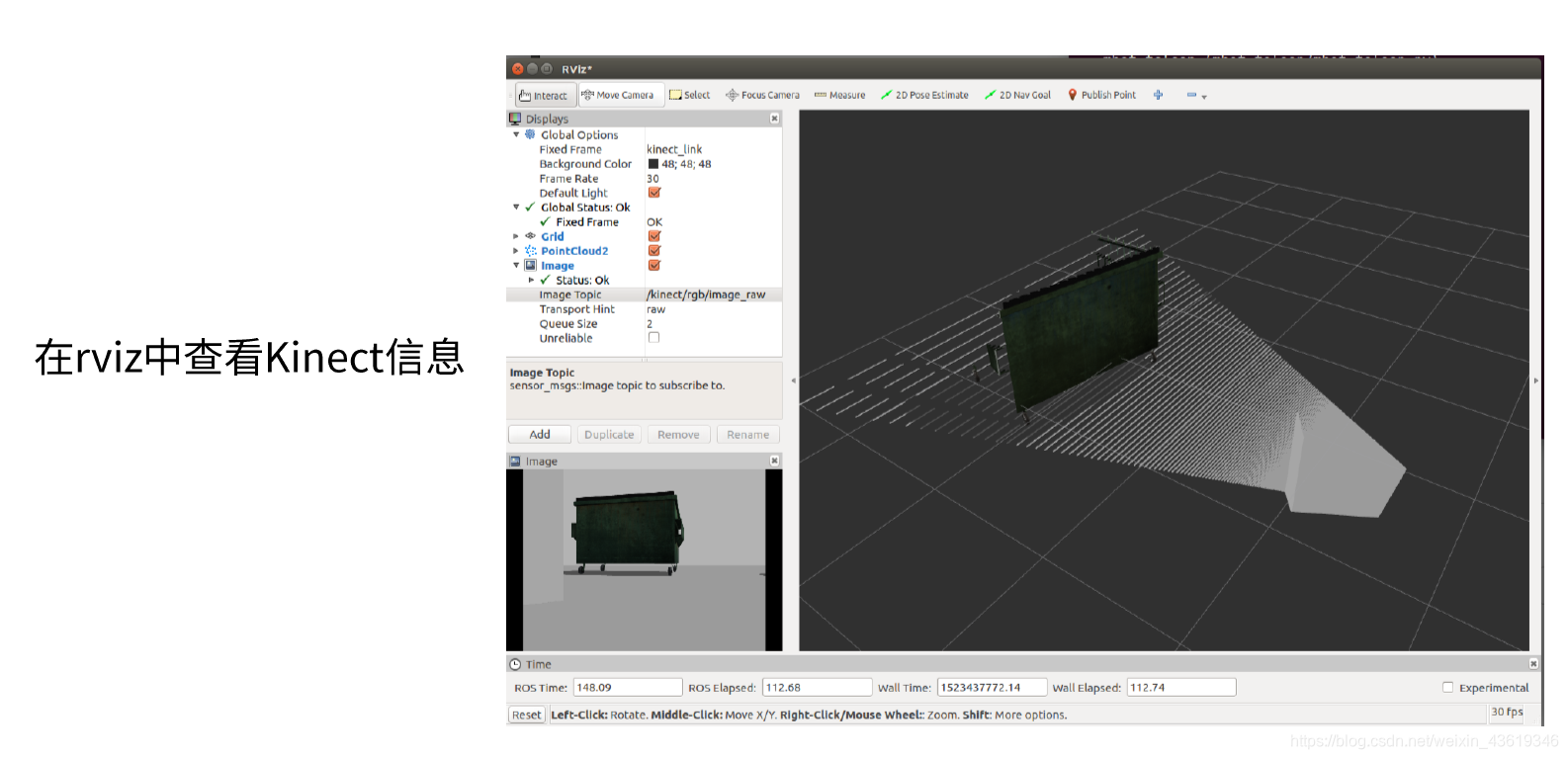
输入命令:rviz
将Fixed Frame选为kinect_link
用add添加:pointCloud2消息
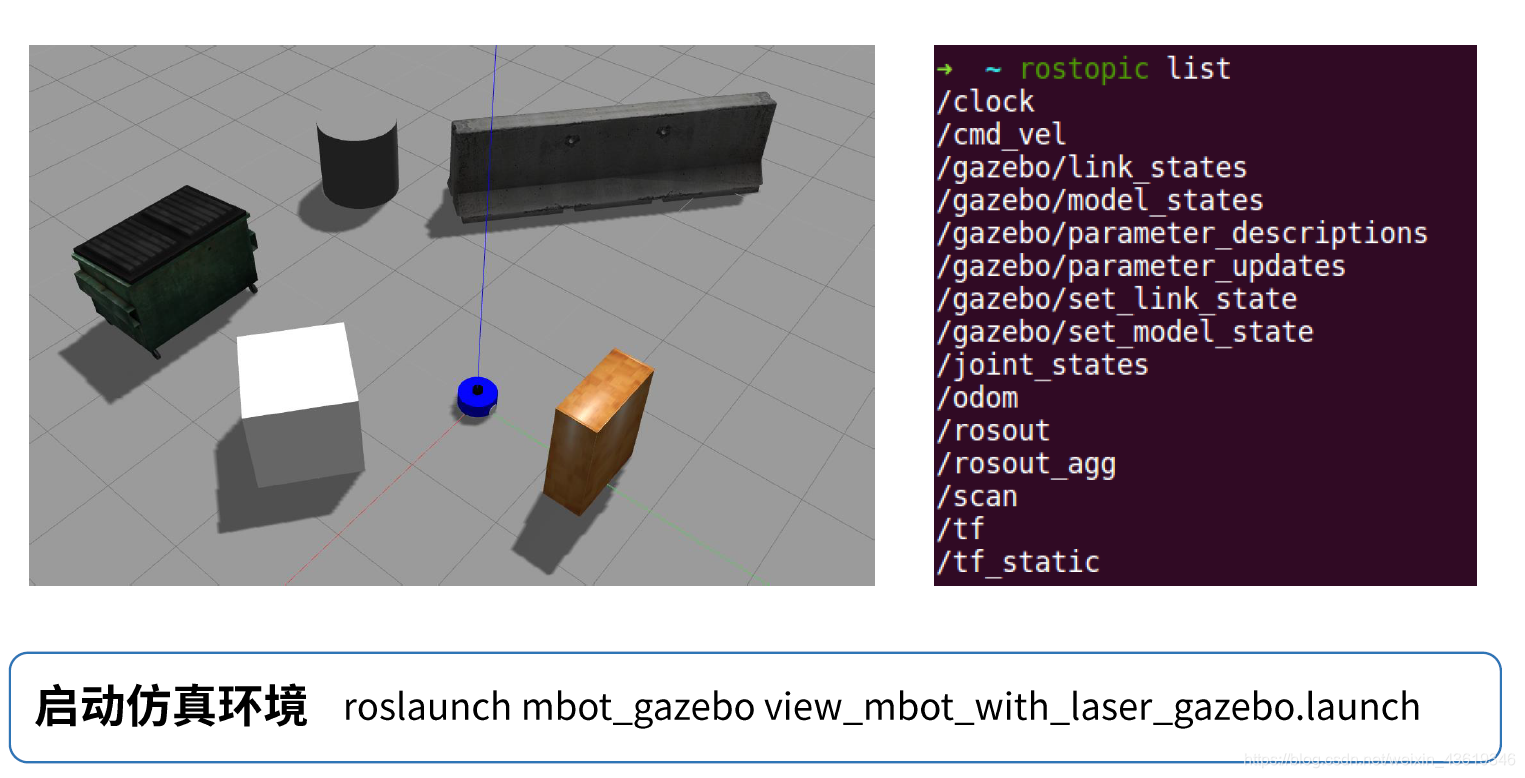
启动仿真环境:roslaunch mbot_gazebo view_mbot_with_laser_gazebo.launch
在rviz中查看激光雷达信息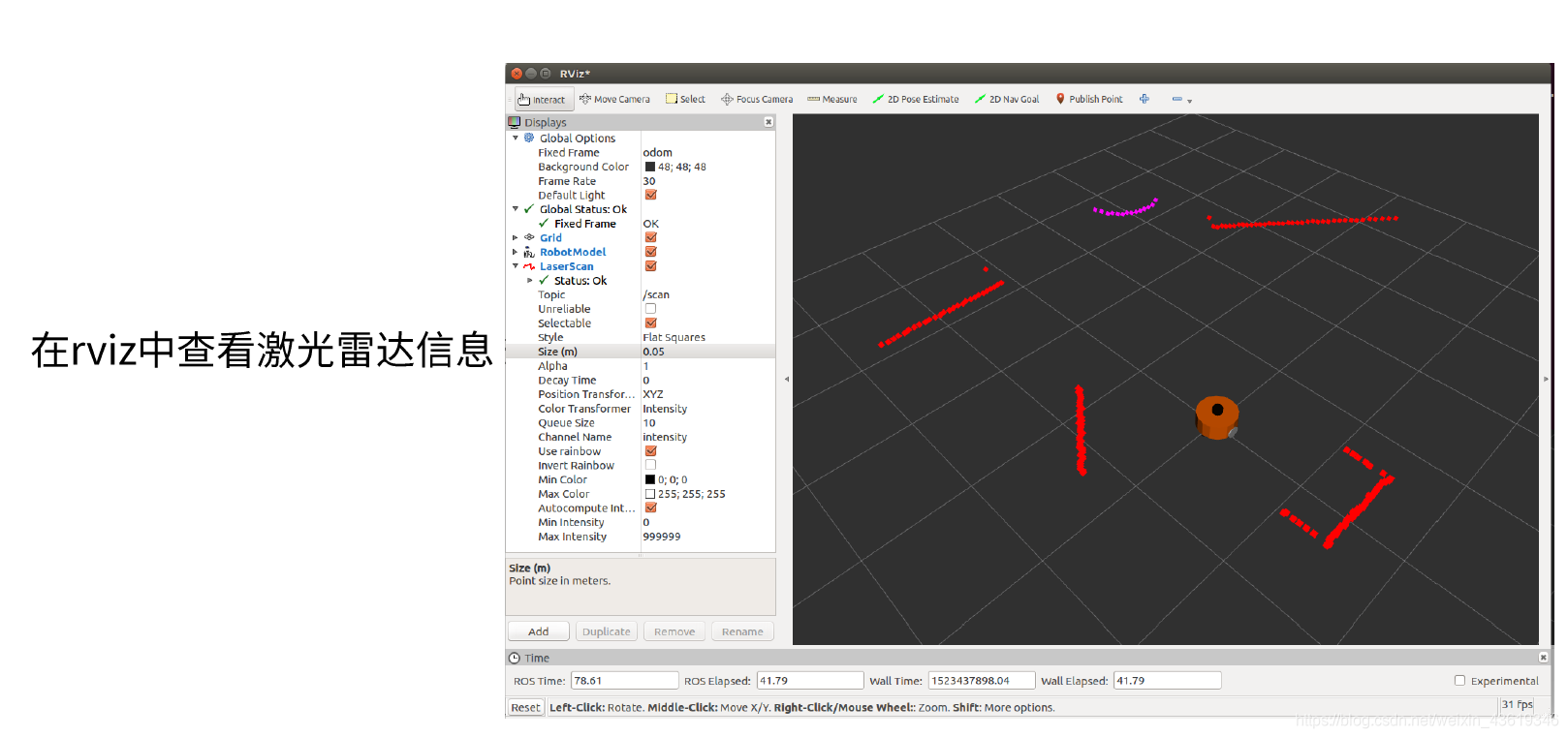
版权声明:本文为weixin_43619346原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。