1、获取扫频数据,导入MATLAB
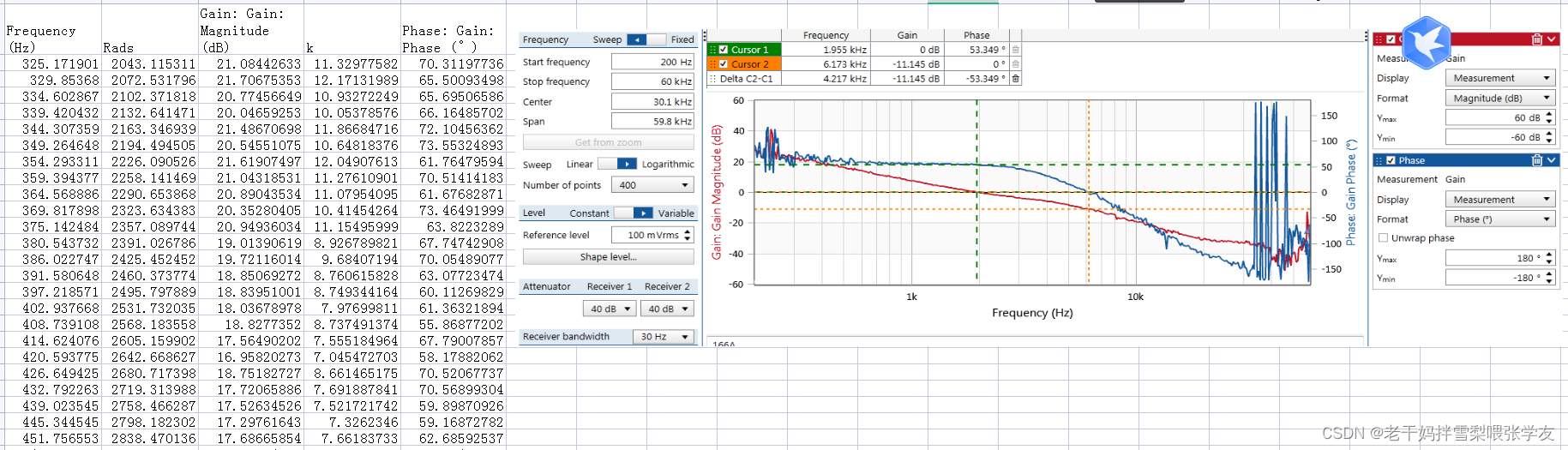

2、计算控制器离散传函,根据扫频数据情况绘制控制器伯德图


3、根据控制器伯德图获取增益、相角数据

4、反算系统增益、相角数据

5、数据平滑处理,得到系统最终伯德图


版权声明:本文为LGM_1874原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。
1、获取扫频数据,导入MATLAB
2、计算控制器离散传函,根据扫频数据情况绘制控制器伯德图
3、根据控制器伯德图获取增益、相角数据
4、反算系统增益、相角数据
5、数据平滑处理,得到系统最终伯德图