迭代法求解四轴机器人逆解
前提:只知道末端点坐标,分别求出各轴角度,C++实现
思路:
四轴对应四个转角j0,j1,j2,j3,并且已知各个Link的长度 L1,L2,L3
通过已知条件可以列出3个方程,但问题有4个未知数,就需要先给应一个角度假设值,即在一定范围内进行迭代,然后代入方程求出其他夹角,不可否认的是会得到多重解,然后再通过施加约束条件选出合适的最优解
如果对相关原理有疑问,可参考:四轴机械臂正、逆运动学详解
对matlab机器人仿真有疑问,可参考:matlab工具箱机械臂运动学正逆矩阵解具体分析
1. 正运动学
首先,正运动学用于迭代过程误差验证: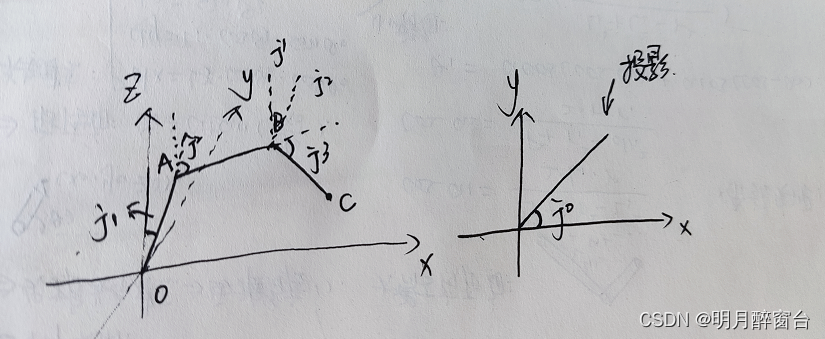
// 根据舵机角度正向解出目标坐标
x = (L1 * <版权声明:本文为yohnyang原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。