机械臂与相机的位置关系分为“eye in hand” 和“eye to hand”。
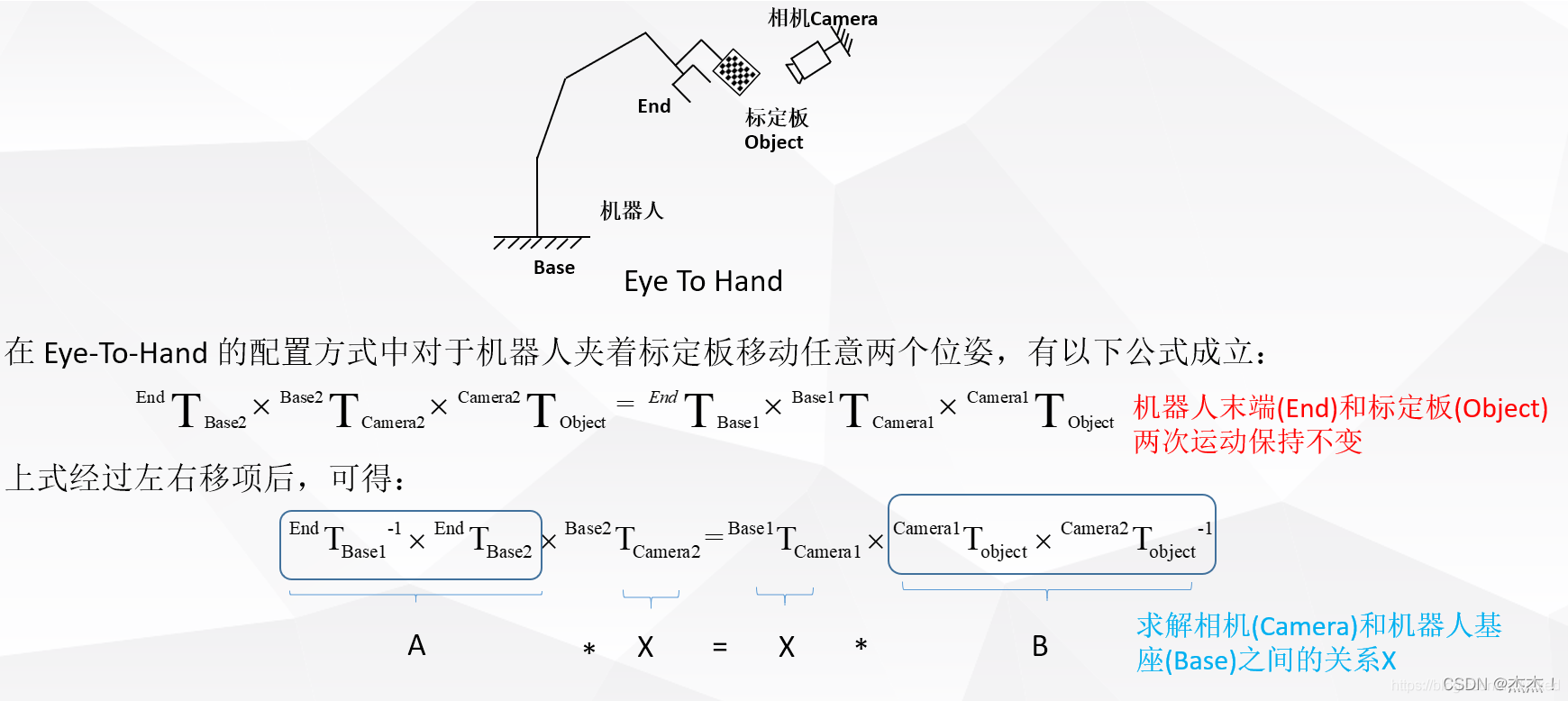
(一)眼在手外(eye-to-hand)
摄像机与机器人基座的位置是相对固定的,这种关系下,两次运动,机器人末端和标定板的位姿关系始终不变,求解的量为相机和机器人底座坐标系之间的位姿关系。
实现方法:1.把标定板固定在机械臂末端
2.使用相机拍摄不同机械臂姿态下的标定板图片n张(n>3)
对每张照片可知:
![]()
其中,
变形得:


(二)眼在手上(eye-in-hand)
摄像机由于固定在机械臂末端,这种关系下,两次运动,机器人底座和标定板的关系始终不变,求解的量为相机和机器人末端坐标系的位姿关系。
实现方法:1.把标定板放到固定位置不动
2.移动机械臂末端,从不同角度拍摄n张标定板照片
对每张照片有:
![]()
其中,

变形得:



版权声明:本文为weixin_43994752原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。