1.安装自带 ros-qtc-plugin插件的qt creator(即不需要提前安装qt)
1.1 终端启动命令:
qtcreator-ros
1.2启动后可以在qt中看到ros插件
2.如何将已有的ros工作空间和qt联系起来
一般ROS工程没有XXX.workspace文件,无法以工程形式导入。但是我们可以通过新建一个ROS工程,并以与现有工程名相同的工程来打开。
第一步、打开装有ROS插件的QT creator
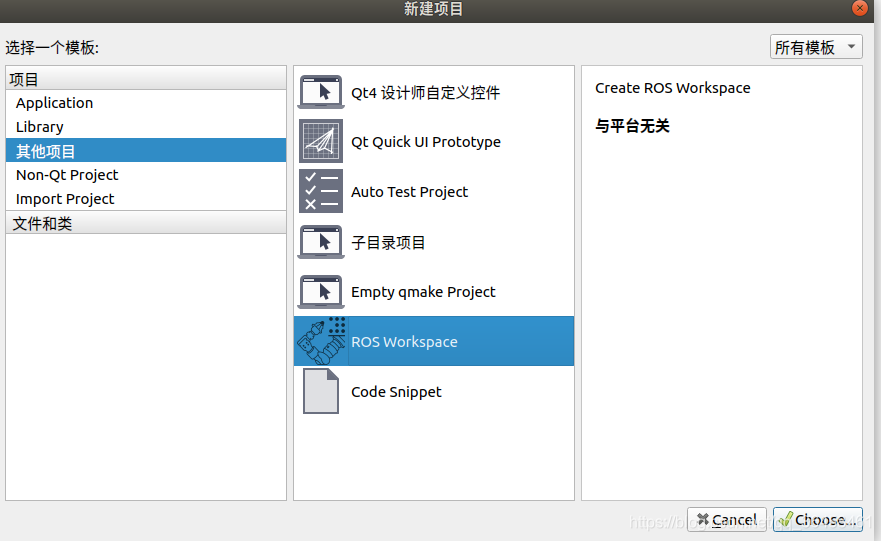
第二部、新建ROS工程
第三步、设置工程名与现有工程名相同(注意 :path路径设在现有工程名下),点击next
备注:比如我之前有个ros的工作空间为 sim_ws, 用qt新建了的工程名也是sim_ws,则一切完成后,在sim_ws工作空间中就会多一个sim_ws.workspace的文件,里面就是关于qt和ros联系的参数配置
<?xml version="1.0"?>
<Workspace>
<Distribution path="/opt/ros/melodic"/>
<DefaultBuildSystem value="/home/mahao/sim_ws/"/>
<WatchDirectories>
<Directory>src</Directory>
</WatchDirectories>
</Workspace>
遇到的问题:
1.当我用qt打开sim_ws.workspace文件时,发现没有任何反映,于是我便查看了sim_ws.workspace里面的参数配置,发现<DefaultBuildSystem value="0"/>,于是我手动改为具体的工作目录后<DefaultBuildSystem value="/home/mahao/sim_ws/"/>,再次用qt打开sim_ws.workspace文件时就ok了。
2.在qt中一般只会看到src目录下的文件,要想添加其他目录下的文件,这时候我们打开工作空间配置文件sim_ws.workspace,将仿照找到src目录的方式,添加其他需要的目录,比如想添加build目录,则:
<WatchDirectories>
<Directory>src</Directory>
<Directory>build</Directory>
</WatchDirectories>
版权声明:本文为qq_36458461原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。