今天有位老哥在群上问了一个问题 为什么他的小车在动 RVIZ里的地图却不会更新
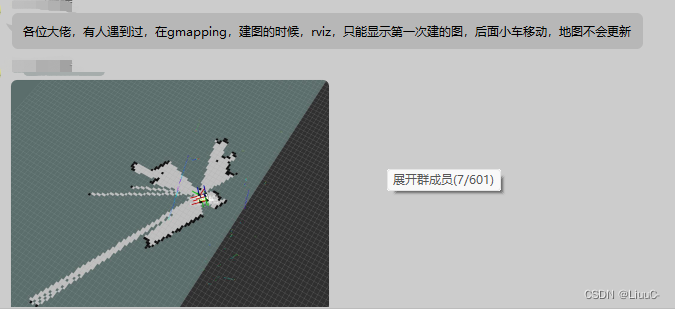
症状就是小车只有第一帧的图,没有接下来的地图更新。
对于这种情况,我的第一反应是这位老哥的odom节点没有发布,或者tf树断开了
但是那位老哥给我发了他的tf树的截图
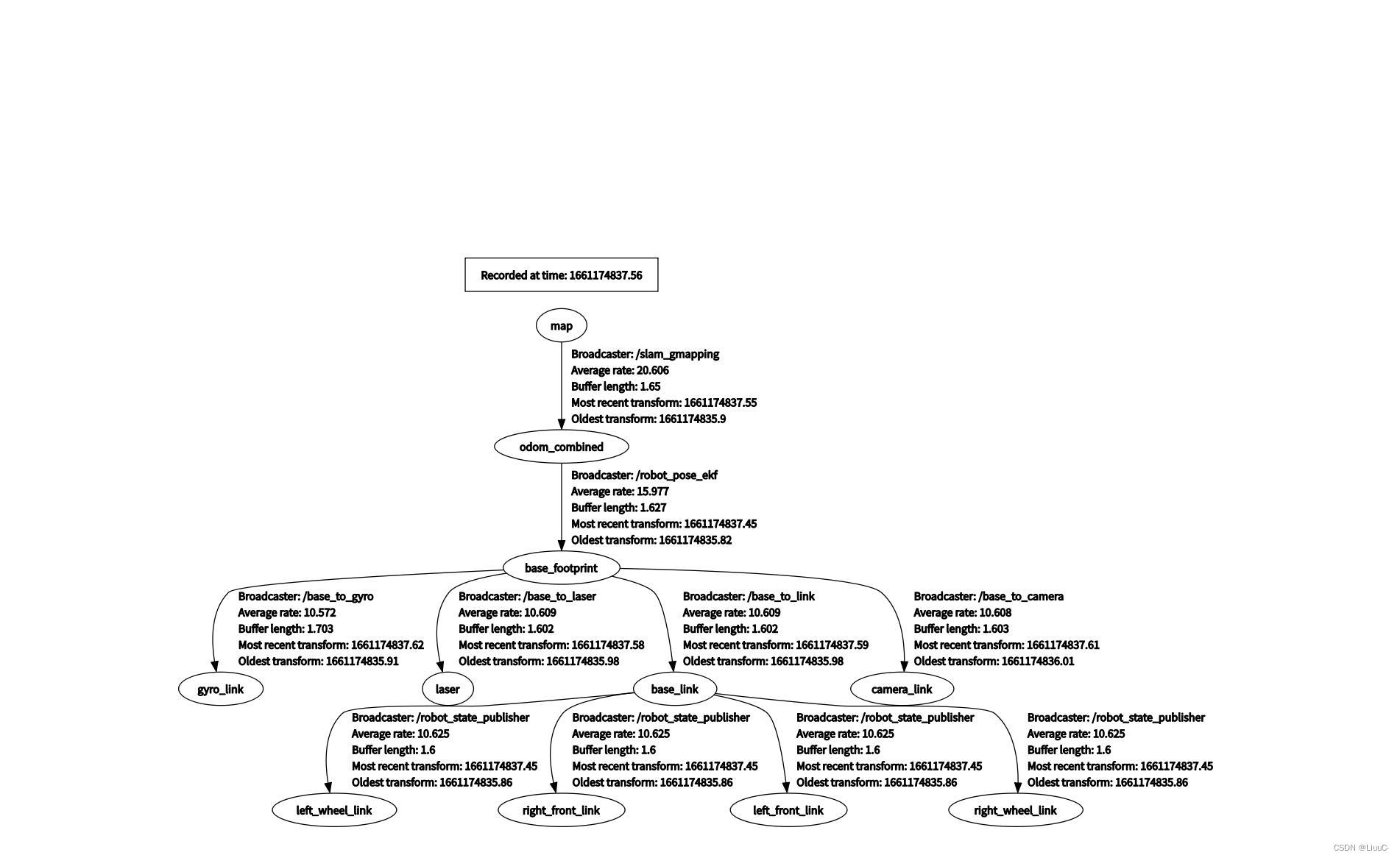
挺正常 没什么异样
然后我就认为是不是odom的信息在ROS里没接收到
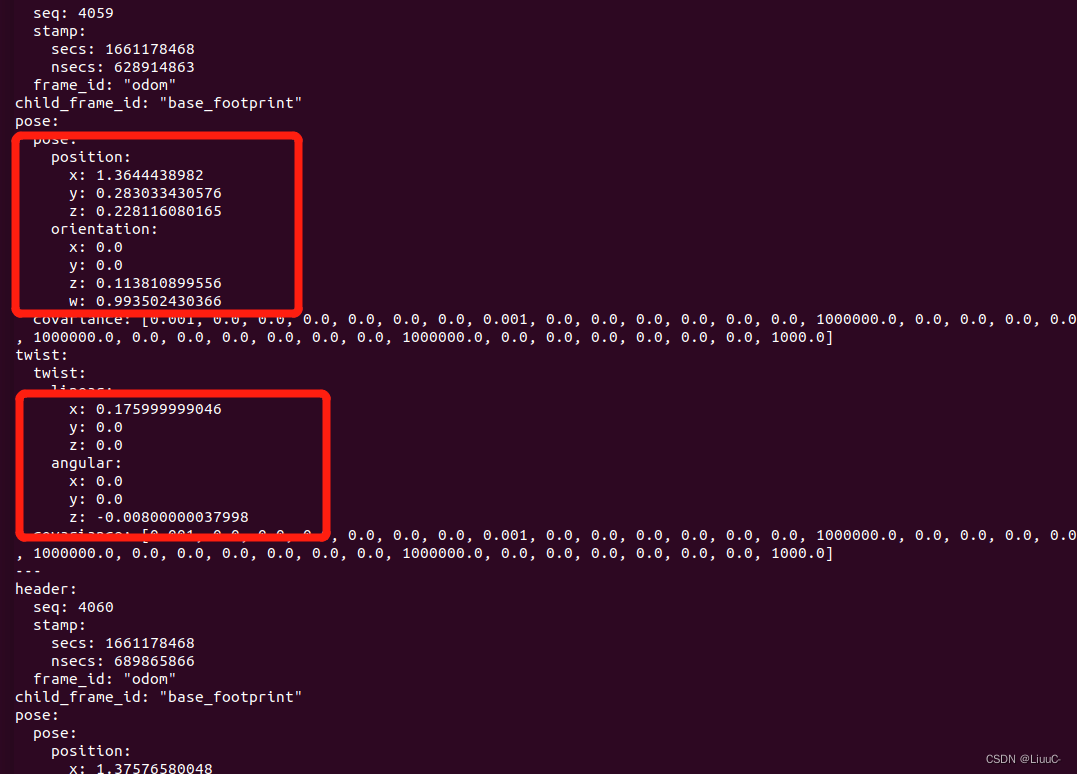
也有 然后就觉得很奇怪
然后我远程连接了那位老哥的电脑后发现
他这机器人运动的话 rviz里的tf是也会跟着移动的 所以他的数据肯定是正常上传了 所以肯定是软件方面出现了问题
然后我关闭机器人模型 和tf 只留下点云数据之后
我发现在机器人的正中间有雷达扫描出的一部分点云

然后我根据这位老哥前面发的车模

发现他这小车在雷达四周有遮挡
所以我让这位老哥试试改一下 雷达配置文件里的最短距离
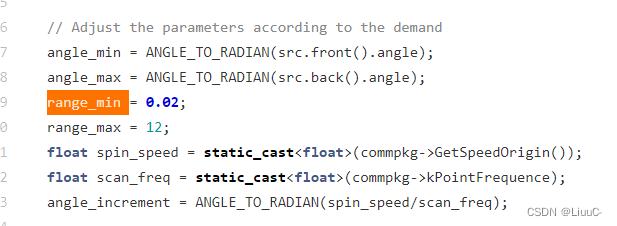
成功解决问题。
可能有读者会觉得该文章前言比较多,但是这是博主自认为调机器人的方法,跟着我这篇文章一步一步对机器人进行调整可能会较为方便
感谢读者阅读到这里 我是一个新手博主 您的点赞和关注会加大我创作的动力
版权声明:本文为qq_39897183原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。