概览
主要分类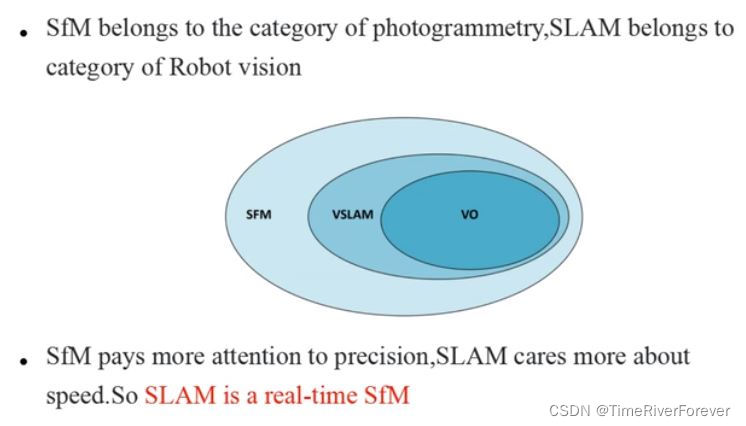
一、SFM(Structure From Motion)
主要分类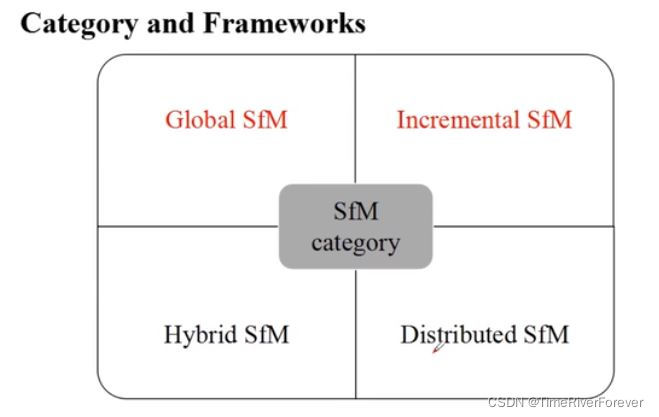
开源框架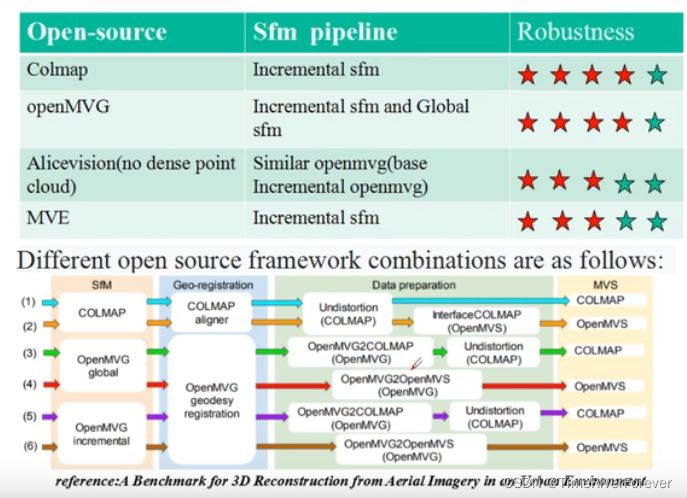
资源列表
1. 三维重建系列视频|Struture from Motion
2. NUS CS4277/CS5477 3D Computer Vision(2021)
二、SLAM(Simultaneous Localization And Mapping)
资源列表
1. 视觉slam系列视频
2. 3D Computer Vision(from youtube or bilibili)
3. SLAM Course (2013-Cyrill Stachniss)
4. Introduction to the Simultaneous Localization and Mapping Problem (SLAM)
Cyrill Stachniss, Spring 2020
5. Lecture: Photogrammetry I&II, Cyrill Stachniss, (2015/16)
三、VO(Visual Odometry)
资源列表
1. VINS-Mono论文详细解读及原理解析(上) & VINS-Mono论文详细解读及原理解析(下)
2. VINS-mono框架入门及代码解析
四、最新论文串讲
Rotation-Only Bundle Adjustment (CVPR 2021)
CVPR 2021: Square Root Bundle Adjustment for Large-Scale Reconstruction
2021年度盘点:十大最佳开源SLAM算法!
版权声明:本文为TimeRiverForever原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。