 点击上方“蓝字”关注我们
点击上方“蓝字”关注我们干货又双叒叕来了!今日为大家带来PCM点云数据处理软件功能使用第九弹—数据处理之点云滤波介绍一,快来跟我们一起学习吧!
 点云滤波简介
点云滤波简介滤波是LiDAR点云预处理的一个重要部分,其目的是分离地面点与非地面点,从而为数据后处理(如DEM、DSM、植被参数反演等)提供数据源。
本软件所提供滤波算法为以下五种:CSF滤波、形态学滤波、移动曲面滤波、坡度滤波和三角网滤波。本次主要介绍前三种滤波算法。
1
CSF滤波 CSF(Cloth Simulation Filter)即布料模拟滤波,其基本原理:原始点云倒置,将一块模拟布料覆盖其上;根据模拟布料的硬度、重力以及粒子间内部牵引力作用,不断迭代寻找模拟布料粒子所对应的最佳位置,得到模拟布料的最终形态,即最优近似估计的地形;最后,依据估计的地形,分离地面点与非地面点。(本算法由中山大学测绘科学与技术学院的张吴明老师提供) 需修改的参数有布料分辨率、最大迭代次数、分类阈值及布料硬度(其中布料越硬,地形越平缓),具体参数设置如下:1
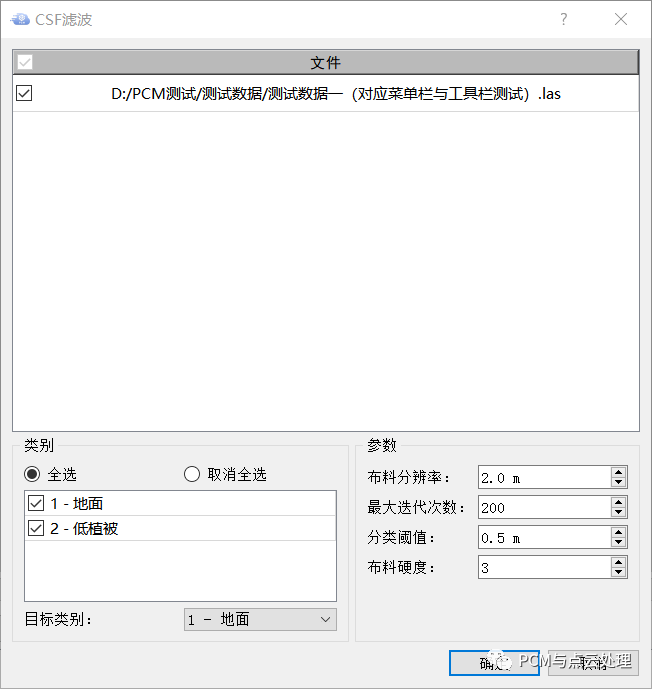

文件:支持从平台读取点云数据(.las和.txt)
类别:其中框内是输入数据类别,目标类别设置为地面点
布料分辨率:布料网格大小
最大迭代次数:一般200即可
分类阈值:激光点与估计地形的距离阈值,0.5m适用于大多数场景
布料硬度:整数值,越大表示布料越硬(1:最软;2:中等;3及以上:较硬,默认3)
形态学滤波 形态学滤波,其基本原理:首先离散点云数据格网化,计算格网最低点高程;运用数学形态学中的腐蚀和膨胀运算,计算运算前后的高差变化,剔除高差变化较大的激光点(即地物点);改变窗口大小,进行多次迭代,直至滤波窗口大于该区域最大建筑物的尺寸。同时,本软件的形态学滤波算法引入坡度算子,在处理过程中不仅考虑高程差,而且考虑到激光点与格网中最低点的坡度,能够有效的检测出地物高程变化。 需修改的参数有格网大小、最大建筑尺寸、最小高差、最大高差及坡度,具体参数设置如下:1
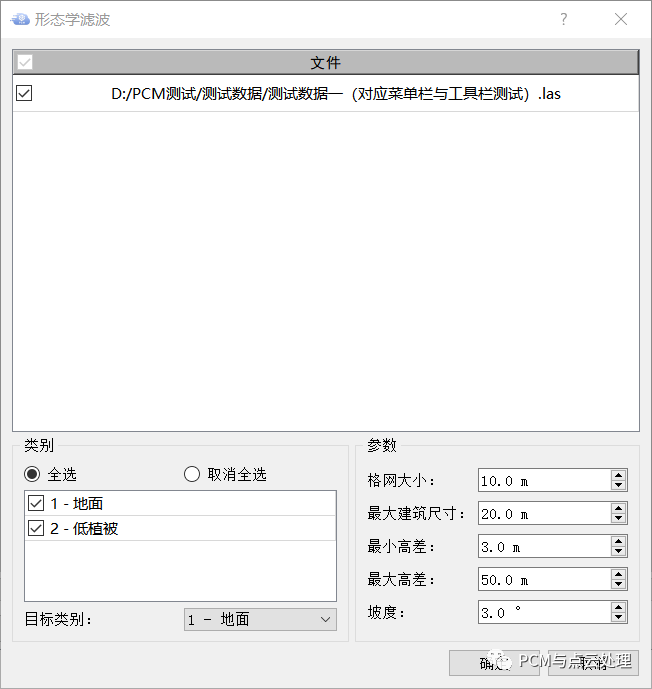
文件:支持从平台读取点云数据(.las和.txt)
类别:其中框内是输入数据类别,目标类别设置为地面点
格网大小:点云格网化的网格边长,单位为米;取值大小可根据点云密度以及数据量来确定,一般2m~10m较为合适
最大建筑尺寸:该参数可根据数据中最大地物占用面积确定
最小高差:最低地物的高度
最大高差:最高地物的高度
坡度:相邻格网内两中心点的坡度
移动曲面滤波 移动曲面滤波算法,其基本原理:地形表面空间形态可用复杂的空间曲面表示,而该曲面的局部面元可用一个二次曲面来逼近;借助一个NxN的移动窗口,寻找每个窗口中的最低点,得到一个粗略的地形曲面模型;剔除超过给定高度阈值的点,适当减小窗口及高度阈值,重复上面的过程直至计算出该区域最佳地形曲面,从而得到地面点。 需修改的参数有格网大小,具体参数设置如下:1
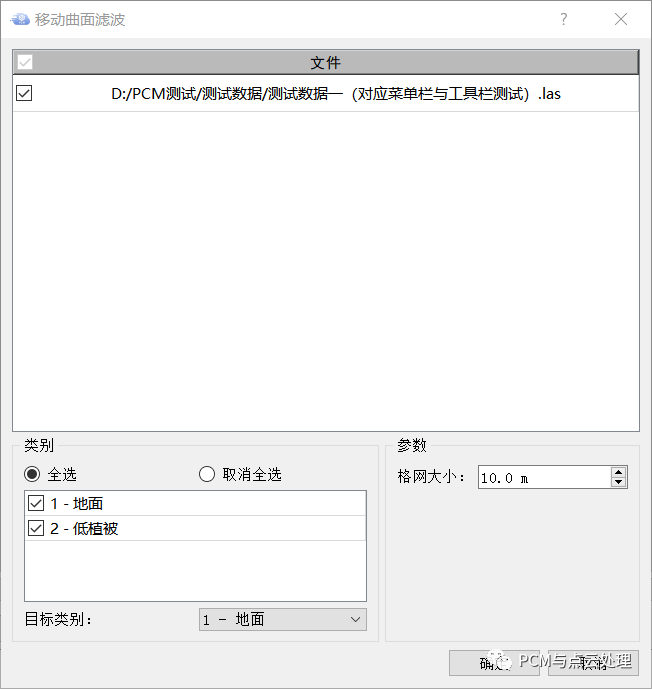
文件:支持从平台读取点云数据(.las和.txt)
类别:其中框内是输入数据类别,目标类别设置为地面点
格网大小:移动窗口大小,单位为米;取值大小可根据点云密度以及数据量来确定,一般5m~10m较为合适
想必大家看完上面的介绍,对CSF滤波、形态学滤波和移动曲面滤波的概念有了初步的了解。下面我们就来重点关注滤波算法处理的操作步骤吧!1.加入原始点云数据后,点击选择数据处理→点云滤波→选择一种滤波算法;
2.弹出算法界面后,选择要处理的类别点云(至少一种类别),并设置对应参数,点击确定;
3.算法运行结束后,软件自动更新滤波结果。
 视频教程
视频教程

往期内容:
PCM点云数据处理软件功能使用第八弹
PCM点云数据处理软件功能使用第七弹
PCM点云数据处理软件功能使用第六弹
PCM点云数据处理软件之密钥申请

 微信号:PCM点云处理获取最新资讯扫码关注
微信号:PCM点云处理获取最新资讯扫码关注 QQ群:70894612加群参与内测扫码进群
QQ群:70894612加群参与内测扫码进群 测试数据与软件使用PCM v2.0测试分享扫码下载
测试数据与软件使用PCM v2.0测试分享扫码下载作者:袁鸷慧、王子家
编辑:王子家
审核:王濮