Gliding Vertex on the Horizontal Bounding Box for Multi-Oriented Object Detection
Box for Multi-Oriented Object Detection)
资源下载
3 PROPOSED METHOD

3.2 Multi-Oriented Object Representation
Fig.2,图2描述了所提表示法的直观说明,v1,v2,v3,v4是移动后的定点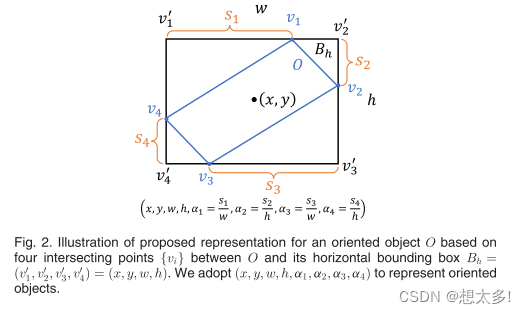
式(2),引入了一个倾斜因子来描述O的倾斜程度,这是由O和Bh之间的面积比 r 给出的。
3.3 Network Architecture
Fig.3,网络架构与 faster R-CNN几乎相同。我们只需添加5个额外的目标变量(归一化到[0,1];使用Sigmoid函数)到 faster R-CNN 的头部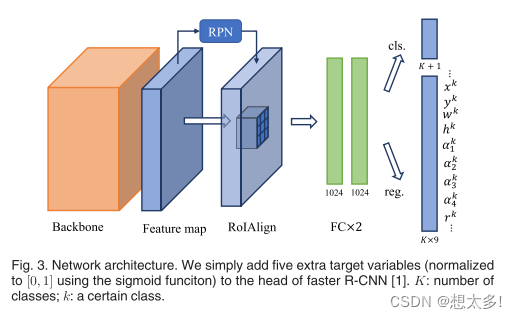
5个额外的目标变量:α{1,2,3,4,5} 和 倾斜引子 r
3.4 Ground-Truth Generation
直接由方程(1)和(2)计算。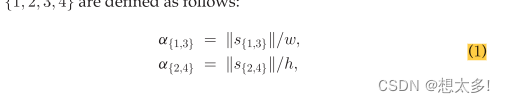

4 EXPERIMENTS
Datasetes:
- DOTA
- HRSC2016
- MSRA-TD500
- RCTW-17
- MW-18Mar
Experiments Results
1.Object Detection in Aerial Images:
所有检测到的分类分数都高于0.6的对象。即使在密集分布和/或长时,该方法也能准确地检测水平和定向物体。
旋转图像检测结果优秀等。
Long Text Detection in Natural Scenes:
在 MSRA-TD500 和 RCTW-17 的定量比较结果显示该方法优于其他竞争方法,在两种数据集上都效率更高。Pedestrian Detection in Fisheye Images:
该方法的缺失率均低于其他所有对比方法。
版权声明:本文为qq_43537420原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。