【PX4 二次开发】QGC使用以及仿真姿态环联动
- 标题 : PX4二次开发教程:
- 起源: 根据阿木实验室讲解课程整理的学习笔记,推荐大家学习无人机的去学习这个课程,俗话说的好:问渠那得清如许,唯有源头活水来 -
- PX4智能无人机开发课程:https://bbs.amovlab.com/plugin.php?id=zhanmishu_video:video&mod=video&cid=39
未更新完 待更新中…
Ubuntu下安装QGC
QGC官网上有他们两种开发方法:
QGC : 安装 地址
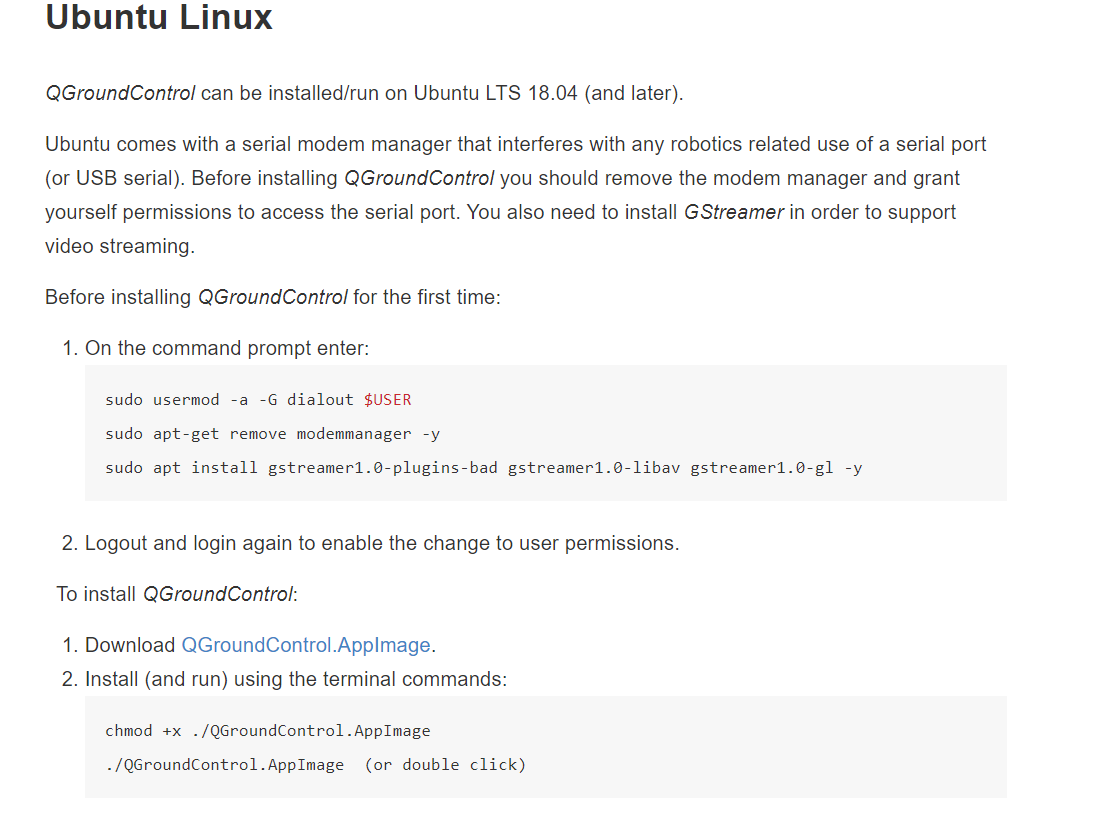
安装流程有三部
第一步是安装他们要的组件
sudo usermod -a -G dialout $USER
sudo apt-get remove modemmanager -y
sudo apt install gstreamer1.0-plugins-bad gstreamer1.0-libav gstreamer1.0-gl -y
第二步去下载QGC .run 文档
QGC ubuntu下载链接
第三步直接打开他的QGC
chmod +x ./QGroundControl.AppImage
./QGroundControl.AppImage (or double click)
仿真下调整姿态环节
首先先运行仿真程序:
make px4_stil_default geogaze
打开QGC之后选择UDP的选项去连接到虚拟仿真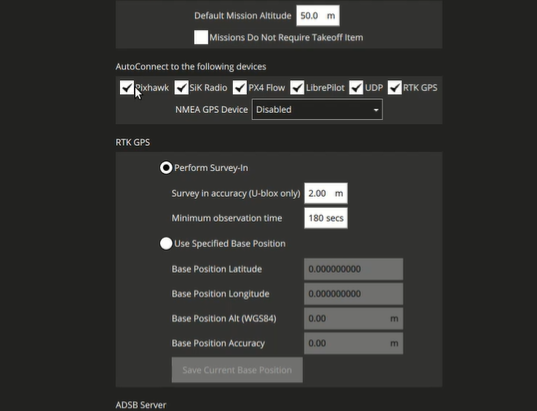
版权声明:本文为Maker_pace原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。