一、前言
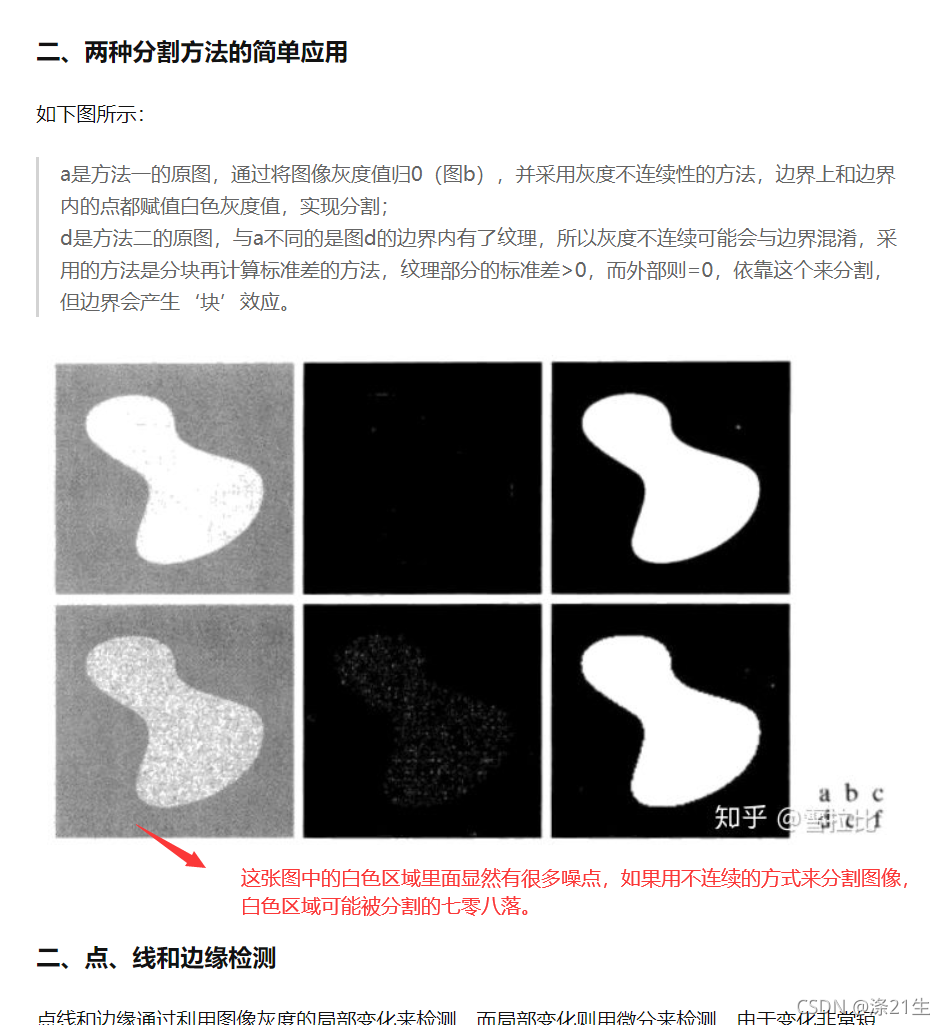
传统图像分割算法主要依靠的是图像灰度值的两个特性:不连续性和相似性
- 不连续性:以灰度突变为基础分割一副图像,比如图像边缘;(边缘两侧的灰度一般是截然不同的)
- 相似性:根据一组预定义的准则将图像分割为相似的区域,比如阈值处理,区域生长,区域分裂,区域聚合。
二、点、线和边缘检测
点线和边缘通过利用图像灰度的局部变化来检测,而局部变化则用导数来检测。

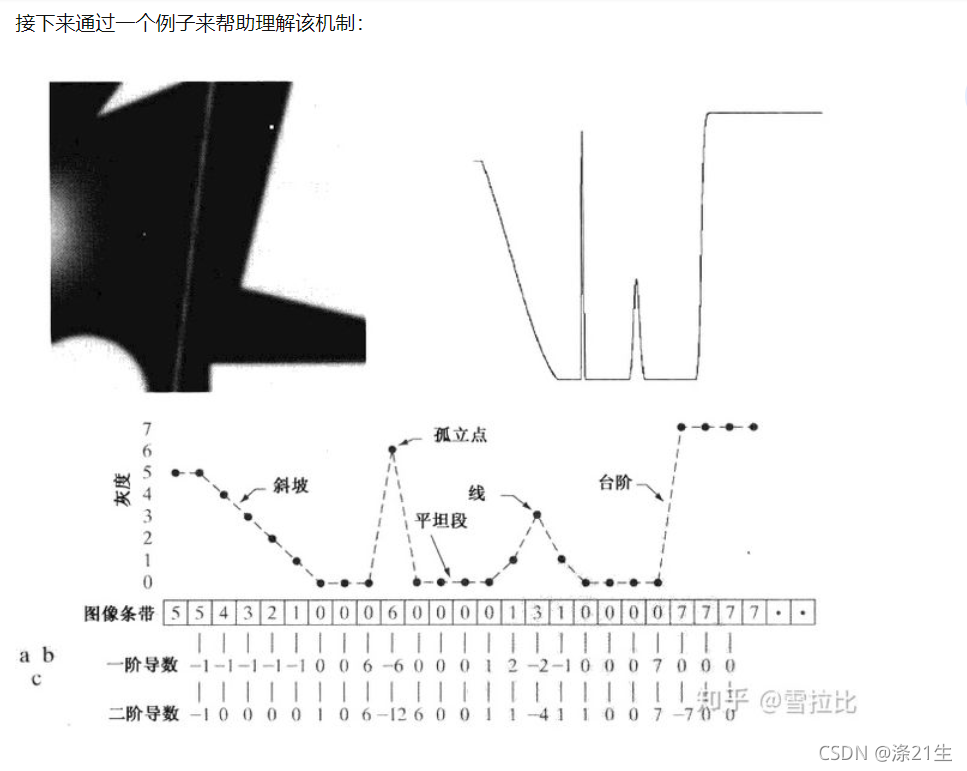
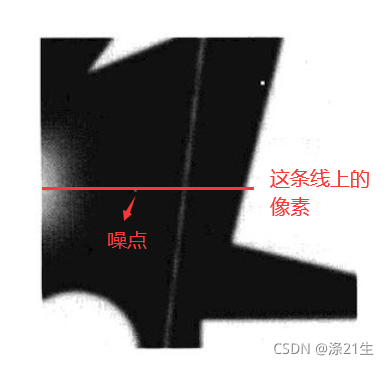
图a是一副图像,分别包括不同的实心物体、一条线与单个噪声点。从图像垂直方向上的中心拉一条水平线,分别记录水平线上的灰度值,就得到图b的灰度变化曲线,为了简化情况,我们把灰度级定成8级,由图c可以很清晰的看到水平线上不同点对应的灰度级。
其中斜坡横跨4个像素,而噪声(图像中间位置的那个很暗的点)则是单个像素,线为三个像素粗,灰度台阶过渡发生在邻接像素间。

(个人理解:这里的一阶导数的‘粗’边缘应该指的是,斜坡区域对应的像素点,一阶导数都是-1,而其他区域都是0)

(指孤立点处,一阶导数为-6,二阶导数为-12)


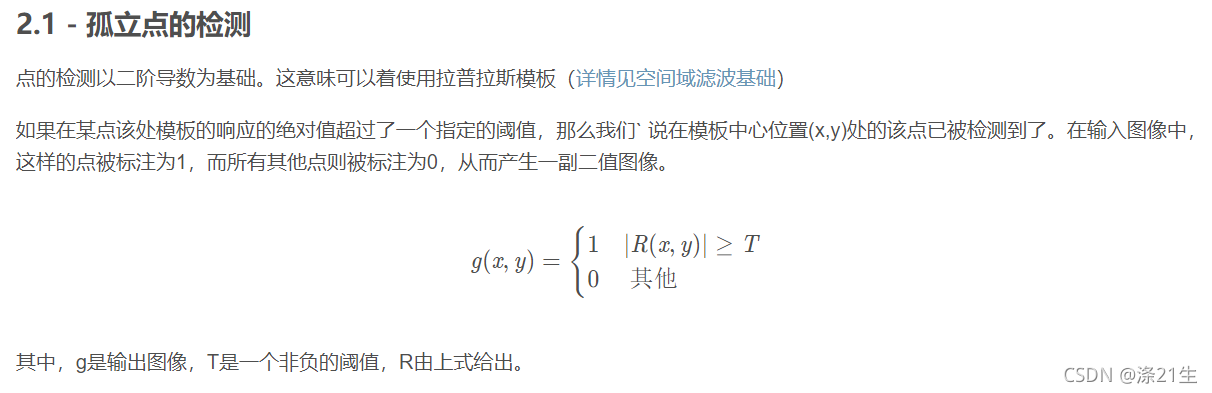
 孤立点的检测
孤立点的检测
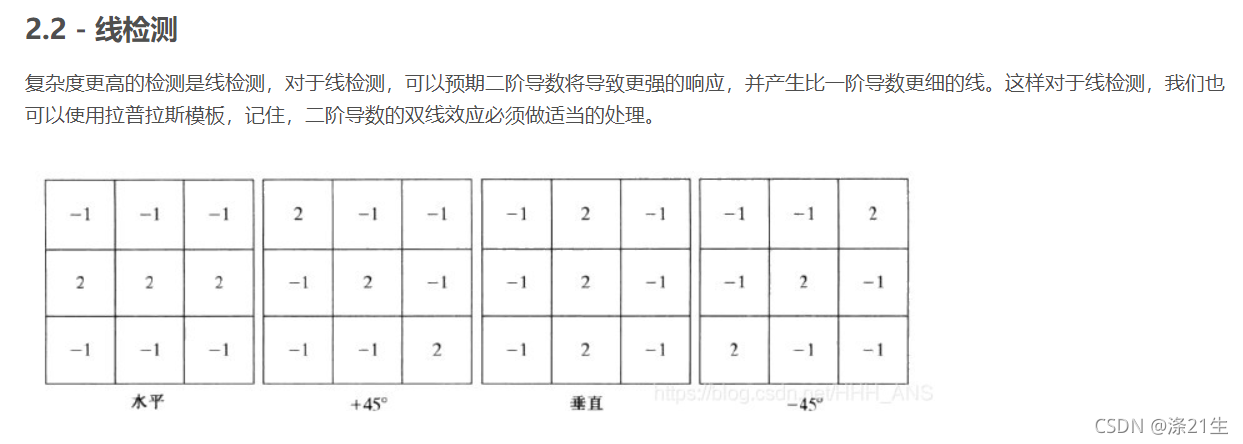
(拉普拉斯模板暂时没懂,以后再说)
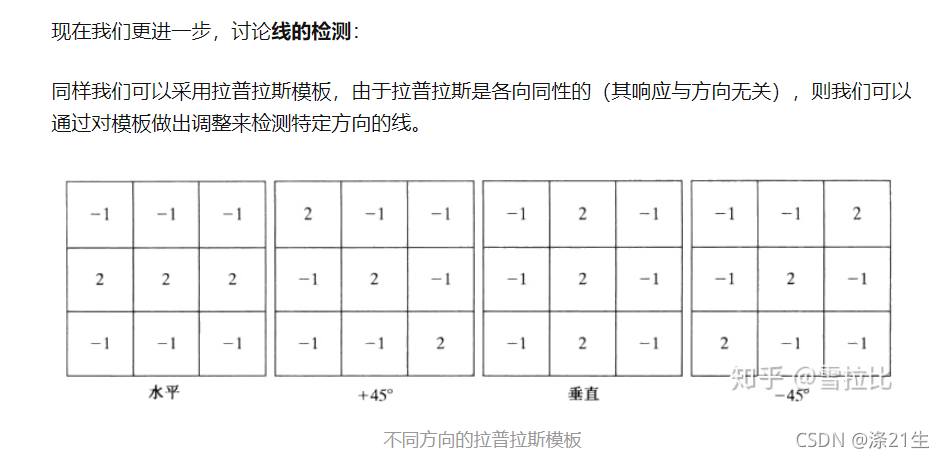
(图中2的方向是什么,就是检测哪个方向的线???)
基本边缘检测:
版权声明:本文为qq_42598935原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。