Lightweight Deep Neural Network for Joint Learning of Underwater Object Detection and Color Conversion
Joint Learning of Underwater Object
Detection and Color Conversion)
资源下载
II. GENERATION OF TRAINING SAMPLES FOR UNDERWATER IMAGES
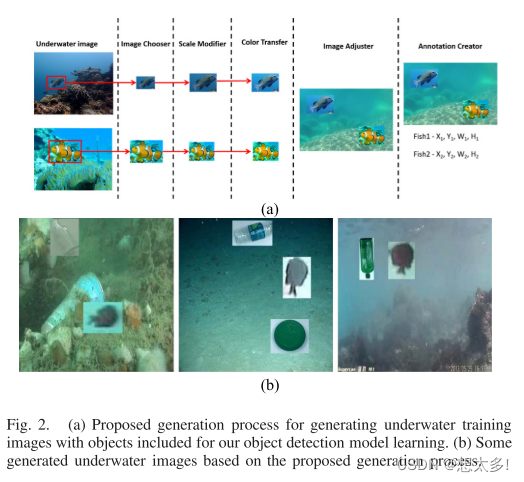
Fig.2 (a):
- 图像选择器模块从带注释的图像集中随机和手动地挑选鱼、碎片或潜水员的对象,作为嵌入到背景水下图像上的对象组件 (或前景)
2.比例修改器模块旨在修改比例和宽高比,以形成每个对象的不同版本
Fig.2 (b):显示了通过建议的生成过程 [参见Fig.2(a)] 获得的一些生成的水下图像。
III. PROPOSED LIGHTWEIGHT DEEP UNDERWATER OBJECT DETECTION NETWORK
Fig. 3,Proposed lightweight deep neural network for underwater object detection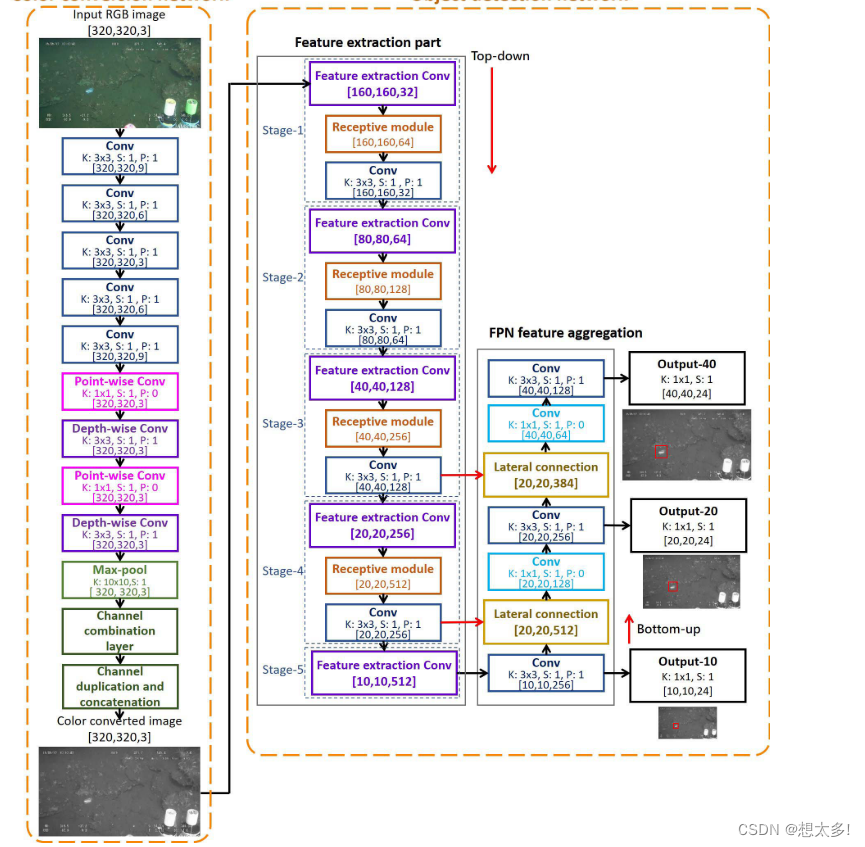
参数含义,下图同:For each layer, [W, H, C] means the size, including the width (W), the height (H), and the number of channels ©, of the output feature map from this layer. In addition, Conv, Max-pool, K, S, and P mean the convolution operation, the max-pooling operation, the kernel size, the stride size, and the padding size, respectively.
A. Color Conversion Network Module

EQ.(1),Transform the input RGB to its corresponding grayscale
B. Object Detection Network Module
在所提出的深度模型中,目标检测网络模块由两个子模块组成,分别命名为特征提取网络模块和特征聚合网络模块。
1) Feature Extraction Network Module
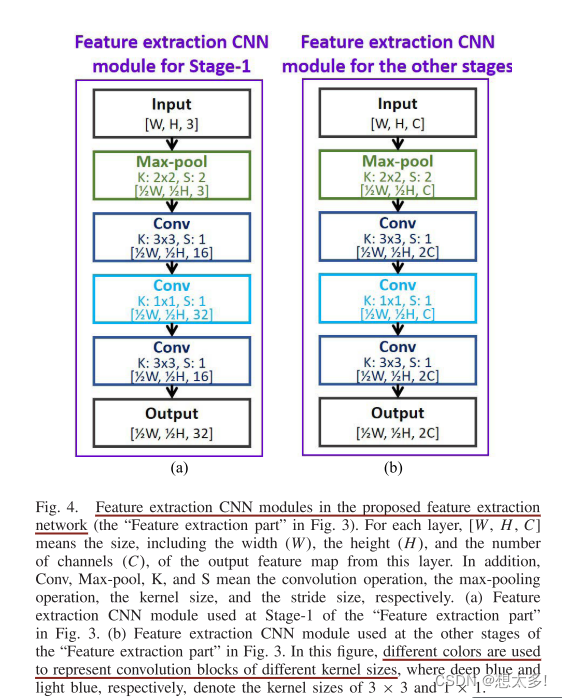
Fig. 4,不同的颜色用于表示不同内核大小的卷积核尺寸K。
- stage1,主要目标是在初始阶段增加特征图,以进行后续的特征提取过程。
- 接下来的阶段中使用1 × 1卷积操作将信道大小减半以减小特征大小并降低计算复杂度
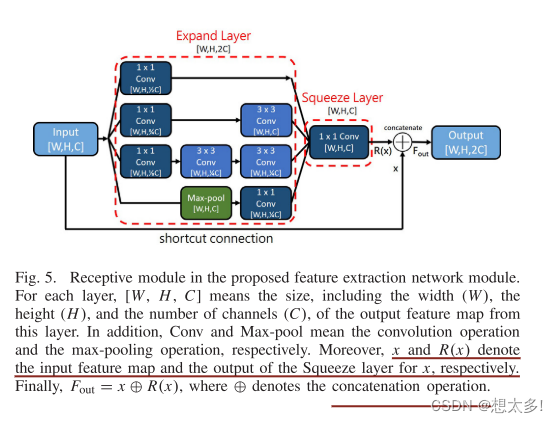
Fig. 5,x和R(x) 分别表示x的
1.输入特征图:
2.挤压层(减少特征通道的数量)的输出。
3. 最后,fot = x ∈ R(x),其中,φ 表示串联运算(避免消失梯度问题)
2) Feature Aggregation Network Module
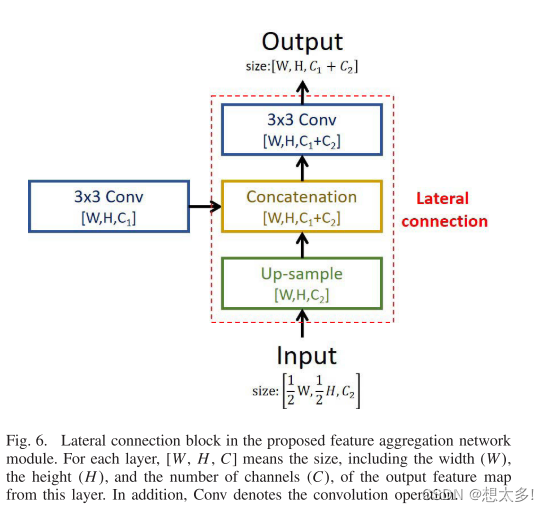
Fig. 6,特征聚合网络将最终产生不同级别的三个输出,用于不同规模的对象检测
IV. EXPERIMENTAL RESULTS
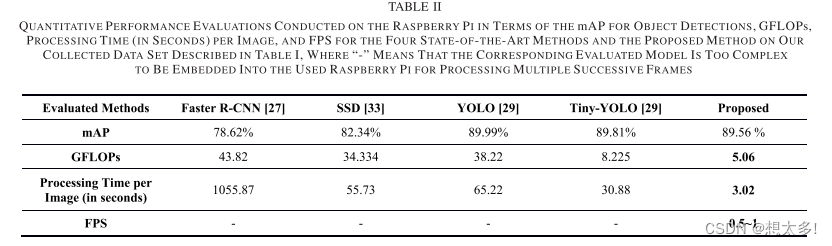
Table II,显示了在2400张水下图像上进行测试的实验结果,所提出的方法在GFLOPs,每幅图像的处理时间和FPS指标方面明显优于四种最新方法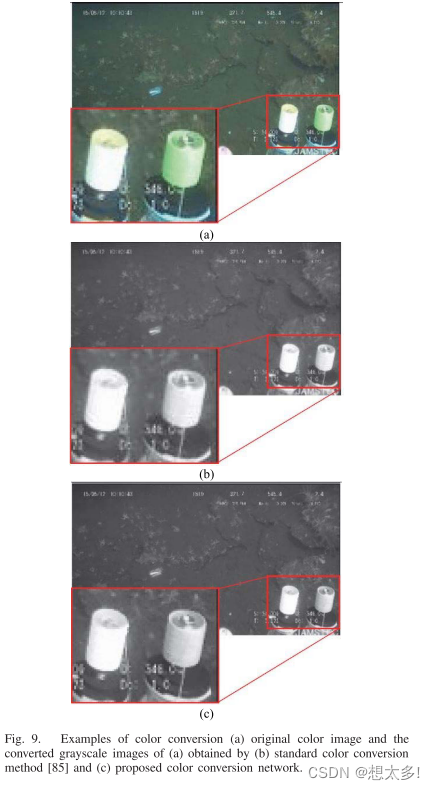
Fig. 9,通过标准颜色转换方法 和所提出的颜色转换网络获得的转换灰度图像 (具有突出显示的区域) 的一些示例如图所示。结果,提出的用于颜色转换和物体检测联合学习的深度模型确实有利于水下物体检测。