BP人工神经网络方法
(一)方法原理人工神经网络是由大量的类似人脑神经元的简单处理单元广泛地相互连接而成的复杂的网络系统。理论和实践表明,在信息处理方面,神经网络方法比传统模式识别方法更具有优势。
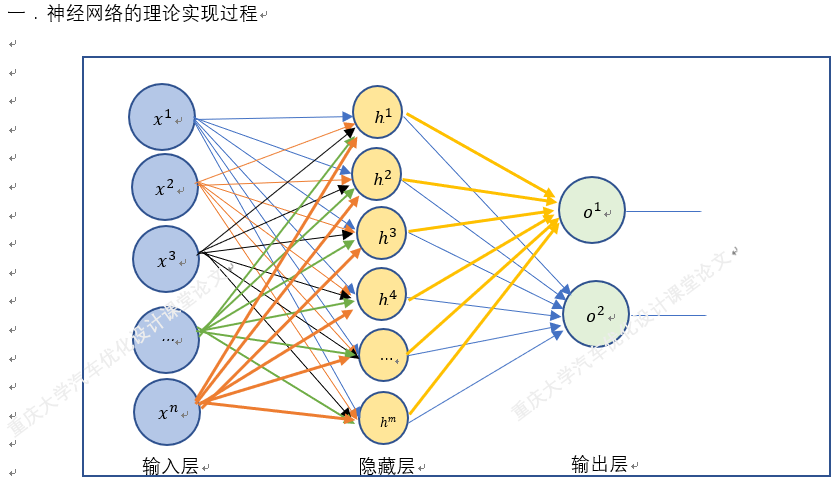
人工神经元是神经网络的基本处理单元,其接收的信息为x1,x2,…,xn,而ωij表示第i个神经元到第j个神经元的连接强度或称权重。
神经元的输入是接收信息X=(x1,x2,…,xn)与权重W={ωij}的点积,将输入与设定的某一阈值作比较,再经过某种神经元激活函数f的作用,便得到该神经元的输出Oi。
常见的激活函数为Sigmoid型。
人工神经元的输入与输出的关系为地球物理勘探概论式中:xi为第i个输入元素,即n维输入矢量X的第i个分量;ωi为第i个输入与处理单元间的互联权重;θ为处理单元的内部阈值;y为处理单元的输出。
常用的人工神经网络是BP网络,它由输入层、隐含层和输出层三部分组成。BP算法是一种有监督的模式识别方法,包括学习和识别两部分,其中学习过程又可分为正向传播和反向传播两部分。
正向传播开始时,对所有的连接权值置随机数作为初值,选取模式集的任一模式作为输入,转向隐含层处理,并在输出层得到该模式对应的输出值。每一层神经元状态只影响下一层神经元状态。
此时,输出值一般与期望值存在较大的误差,需要通过误差反向传递过程,计算模式的各层神经元权值的变化量。这个过程不断重复,直至完成对该模式集所有模式的计算,产生这一轮训练值的变化量Δωij。
在修正网络中各种神经元的权值后,网络重新按照正向传播方式得到输出。实际输出值与期望值之间的误差可以导致新一轮的权值修正。正向传播与反向传播过程循环往复,直到网络收敛,得到网络收敛后的互联权值和阈值。
(二)BP神经网络计算步骤(1)初始化连接权值和阈值为一小的随机值,即W(0)=任意值,θ(0)=任意值。(2)输入一个样本X。
(3)正向传播,计算实际输出,即根据输入样本值、互联权值和阈值,计算样本的实际输出。
其中输入层的输出等于输入样本值,隐含层和输出层的输入为地球物理勘探概论输出为地球物理勘探概论式中:f为阈值逻辑函数,一般取Sigmoid函数,即地球物理勘探概论式中:θj表示阈值或偏置;θ0的作用是调节Sigmoid函数的形状。
较小的θ0将使Sigmoid函数逼近于阈值逻辑单元的特征,较大的θ0将导致Sigmoid函数变平缓,一般取θ0=1。
(4)计算实际输出与理想输出的误差地球物理勘探概论式中:tpk为理想输出;Opk为实际输出;p为样本号;k为输出节点号。
(5)误差反向传播,修改权值地球物理勘探概论式中:地球物理勘探概论地球物理勘探概论(6)判断收敛。若误差小于给定值,则结束,否则转向步骤(2)。
(三)塔北雅克拉地区BP神经网络预测实例以塔北雅克拉地区S4井为已知样本,取氧化还原电位,放射性元素Rn、Th、Tc、U、K和地震反射构造面等7个特征为识别的依据。
构造面反映了局部构造的起伏变化,其局部隆起部位应是油气运移和富集的有利部位,它可以作为判断含油气性的诸种因素之一。
在该地区投入了高精度重磁、土壤微磁、频谱激电等多种方法,一些参数未入选为判别的特征参数,是因为某些参数是相关的。
在使用神经网络方法判别之前,还采用K-L变换(Karhaem-Loeve)来分析和提取特征。S4井位于测区西南部5线25点,是区内唯一已知井。
该井在5390.6m的侏罗系地层获得40.6m厚的油气层,在5482m深的震旦系地层中获58m厚的油气层。
取S4井周围9个点,即4~6线的23~25点作为已知油气的训练样本;由于区内没有未见油的钻井,只好根据地质资料分析,选取14~16线的55~57点作为非油气的训练样本。
BP网络学习迭代17174次,总误差为0.0001,学习效果相当满意。以学习后的网络进行识别,得出结果如图6-2-4所示。
图6-2-4塔北雅克拉地区BP神经网络聚类结果(据刘天佑等,1997)由图6-2-4可见,由预测值大于0.9可得5个大封闭圈远景区,其中测区南部①号远景区对应着已知油井S4井;②、③号油气远景区位于地震勘探所查明的托库1、2号构造,该两个构造位于沙雅隆起的东段,其西段即为1984年钻遇高产油气流的Sch2井,应是含油气性好的远景区;④、⑤号远景区位于大涝坝构造,是yh油田的组成部分。
谷歌人工智能写作项目:小发猫

matlab中BP神经网络OCR识别?
单看错误率分析不出来什么,可能是样本量太少,也可能是别的原因常见的神经网络结构。可以把错误识别的样本拿出来,看看是哪些地方导致的错误,再有针对性的改进。
还可能是特征工程不到位,特征选取的不好,不满足尺度不变性、旋转不变性、仿射不变性三个要素,说白了就是,大小变了,旋转的角度变了,拍照的时候站的位置不同导致对车牌的透视发生变化了,然后可能就识别不出来了。
所以可以考虑找一个更好的描述特征的方法,比如HoG(方向梯度直方图)。
HoG,简单说就是,相邻的两个像素值做个减法,就可以表示颜色的变化,那么一个像素周围,上下、左右各有两个像素,就可以分别做两个减法,得到两个值,就像力学里两个力可以合并一样,这两个值也可以合并,得到方向,和大小(就是梯度),这样就有了一个像素的特征。
但是特征太多计算量太大,就用统计的方法减少下特征,首先把图片划分成网格的形式,就像是在图像上画围棋线一样,然后每个方格内单独统计一下,方向在0-20角度内的像素的梯度的和是多少,依次类推,就得到了直方图,如果以20度为一个直方的话,那么180度就可以划分成9个直方,也就是9个特征,这样一个方格内的特征数量就与像素的数量无关了,而是固定了的。
然后就是关于HoG的其他手段了,比如为了消除光照变化,可以对特征向量做归一化等。
另外还可以对HoG可视化,在每个方格内,用线的方向和长度代替特征的方向和梯度,最后呈现的效果是,有若干个方格,每个方格内都好像有一个沿原点对称的星星,这样做对分析算法效果有一定帮助。
HoG是比较常见的特征描述子了,在行人检测上用的比较多。除了HoG,还有SIFT、SURF等特征描述子,这些都是计算机视觉中的内容了,属于特征检测的范畴。
计算机视觉主要包括二值化、滤波器、特征检测、特征匹配等一些基础的手段,然后就是图像滤镜、图像分割、图像识别、图像生成等具体的应用算法。
由于近年来计算成本降低导致神经网络的再度崛起,计算机视觉的研究热点已经转为深度神经网络的各种改进和性能优化上了,像HoG已经是05年的事情了。
关于车牌识别(LPR),如果环境不复杂,是可以做到接近100%的准确率的,如果环境较为复杂,95%以上准确率应该是可以做到的。总的来说,基本已经实现应用落地和商用了。
现在的方法基本都是深度学习,端到端一气呵成,无需专门提取特征,传统的模式识别方法已经GG。说的比较细。
如果只是关心结果的话,Github上可以找到关于车牌识别的一些开源项目,比如openalpr之类的,当然也是采用深度学习的办法,炼丹嘛,就是这么直接。
BP神经网络方法
。
人工神经网络是近几年来发展起来的新兴学科,它是一种大规模并行分布处理的非线性系统,适用解决难以用数学模型描述的系统,逼近任何非线性的特性,具有很强的自适应、自学习、联想记忆、高度容错和并行处理能力,使得神经网络理论的应用已经渗透到了各个领域。
近年来,人工神经网络在水质分析和评价中的应用越来越广泛,并取得良好效果。在这些应用中,纵观应用于模式识别的神经网络,BP网络是最有效、最活跃的方法之一。
BP网络是多层前向网络的权值学习采用误差逆传播学习的一种算法(ErrorBackPropagation,简称BP)。在具体应用该网络时分为网络训练及网络工作两个阶段。
在网络训练阶段,根据给定的训练模式,按照“模式的顺传播”→“误差逆传播”→“记忆训练”→“学习收敛”4个过程进行网络权值的训练。
在网络的工作阶段,根据训练好的网络权值及给定的输入向量,按照“模式顺传播”方式求得与输入向量相对应的输出向量的解答(阎平凡,2000)。
BP算法是一种比较成熟的有指导的训练方法,是一个单向传播的多层前馈网络。它包含输入层、隐含层、输出层,如图4-4所示。
图4-4地下水质量评价的BP神经网络模型图4-4给出了4层地下水水质评价的BP神经网络模型。同层节点之间不连接。
输入信号从输入层节点,依次传过各隐含层节点,然后传到输出层节点,如果在输出层得不到期望输出,则转入反向传播,将误差信号沿原来通路返回,通过学习来修改各层神经元的权值,使误差信号最小。
每一层节点的输出只影响下一层节点的输入。
每个节点都对应着一个作用函数(f)和阈值(a),BP网络的基本处理单元量为非线性输入-输出的关系,输入层节点阈值为0,且f(x)=x;而隐含层和输出层的作用函数为非线性的Sigmoid型(它是连续可微的)函数,其表达式为f(x)=1/(1+e-x)(4-55)设有L个学习样本(Xk,Ok)(k=1,2,…,l),其中Xk为输入,Ok为期望输出,Xk经网络传播后得到的实际输出为Yk,则Yk与要求的期望输出Ok之间的均方误差为区域地下水功能可持续性评价理论与方法研究式中:M为输出层单元数;Yk,p为第k样本对第p特性分量的实际输出;Ok,p为第k样本对第p特性分量的期望输出。
样本的总误差为区域地下水功能可持续性评价理论与方法研究由梯度下降法修改网络的权值,使得E取得最小值,学习样本对Wij的修正为区域地下水功能可持续性评价理论与方法研究式中:η为学习速率,可取0到1间的数值。
所有学习样本对权值Wij的修正为区域地下水功能可持续性评价理论与方法研究通常为增加学习过程的稳定性,用下式对Wij再进行修正:区域地下水功能可持续性评价理论与方法研究式中:β为充量常量;Wij(t)为BP网络第t次迭代循环训练后的连接权值;Wij(t-1)为BP网络第t-1次迭代循环训练后的连接权值。
在BP网络学习的过程中,先调整输出层与隐含层之间的连接权值,然后调整中间隐含层间的连接权值,最后调整隐含层与输入层之间的连接权值。实现BP网络训练学习程序流程,如图4-5所示(倪深海等,2000)。
图4-5BP神经网络模型程序框图若将水质评价中的评价标准作为样本输入,评价级别作为网络输出,BP网络通过不断学习,归纳出评价标准与评价级别间复杂的内在对应关系,即可进行水质综合评价。
BP网络对地下水质量综合评价,其评价方法不需要过多的数理统计知识,也不需要对水质量监测数据进行复杂的预处理,操作简便易行,评价结果切合实际。
由于人工神经网络方法具有高度民主的非线性函数映射功能,使得地下水水质评价结果较准确(袁曾任,1999)。
BP网络可以任意逼近任何连续函数,但是它主要存在如下缺点:①从数学上看,它可归结为一非线性的梯度优化问题,因此不可避免地存在局部极小问题;②学习算法的收敛速度慢,通常需要上千次或更多。
神经网络具有学习、联想和容错功能,是地下水水质评价工作方法的改进,如何在现行的神经网络中进一步吸取模糊和灰色理论的某些优点,建立更适合水质评价的神经网络模型,使该模型既具有方法的先进性又具有现实的可行性,将是我们今后研究和探讨的问题。
哪些神经网络可以用在图像特征提取上
BP神经网络、离散Hopfield网络、LVQ神经网络等等都可以。
1.BP(BackPropagation)神经网络是1986年由Rumelhart和McCelland为首的科学家小组提出,是一种按误差逆传播算法训练的多层前馈网络,是目前应用最广泛的神经网络模型之一。
BP网络能学习和存贮大量的输入-输出模式映射关系,而无需事前揭示描述这种映射关系的数学方程。它的学习规则是使用最速下降法,通过反向传播来不断调整网络的权值和阈值,使网络的误差平方和最小。
BP神经网络模型拓扑结构包括输入层(input)、隐层(hiddenlayer)和输出层(outputlayer)。
2.Hopfiled神经网络是一种递归神经网络,由约翰·霍普菲尔德在1982年发明。Hopfield网络是一种结合存储系统和二元系统的神经网络。
它保证了向局部极小的收敛,但收敛到错误的局部极小值(localminimum),而非全局极小(globalminimum)的情况也可能发生。Hopfiled网络也提供了模拟人类记忆的模型。
3.LVQ神经网络由三层组成,即输入层、隐含层和输出层,网络在输入层与隐含层间为完全连接,而在隐含层与输出层间为部分连接,每个输出层神经元与隐含层神经元的不同组相连接。
隐含层和输出层神经元之间的连接权值固定为1。输入层和隐含层神经元间连接的权值建立参考矢量的分量(对每个隐含神经元指定一个参考矢量)。在网络训练过程中,这些权值被修改。
隐含层神经元(又称为Kohnen神经元)和输出神经元都具有二进制输出值。
当某个输入模式被送至网络时,参考矢量最接近输入模式的隐含神经元因获得激发而赢得竞争,因而允许它产生一个“1”,而其它隐含层神经元都被迫产生“0”。
与包含获胜神经元的隐含层神经元组相连接的输出神经元也发出“1”,而其它输出神经元均发出“0”。产生“1”的输出神经元给出输入模式的类,由此可见,每个输出神经元被用于表示不同的类。
如何通过人工神经网络实现图像识别
。
人工神经网络(ArtificialNeuralNetworks)(简称ANN)系统从20世纪40年代末诞生至今仅短短半个多世纪,但由于他具有信息的分布存储、并行处理以及自学习能力等优点,已经在信息处理、模式识别、智能控制及系统建模等领域得到越来越广泛的应用。
尤其是基于误差反向传播(ErrorBackPropagation)算法的多层前馈网络(Multiple-LayerFeedforwardNetwork)(简称BP网络),可以以任意精度逼近任意的连续函数,所以广泛应用于非线性建模、函数逼近、模式分类等方面。
目标识别是模式识别领域的一项传统的课题,这是因为目标识别不是一个孤立的问题,而是模式识别领域中大多数课题都会遇到的基本问题,并且在不同的课题中,由于具体的条件不同,解决的方法也不尽相同,因而目标识别的研究仍具有理论和实践意义。
这里讨论的是将要识别的目标物体用成像头(红外或可见光等)摄入后形成的图像信号序列送入计算机,用神经网络识别图像的问题。
一、BP神经网络BP网络是采用Widrow-Hoff学习算法和非线性可微转移函数的多层网络。一个典型的BP网络采用的是梯度下降算法,也就是Widrow-Hoff算法所规定的。
backpropagation就是指的为非线性多层网络计算梯度的方法。一个典型的BP网络结构如图所示。我们将它用向量图表示如下图所示。
其中:对于第k个模式对,输出层单元的j的加权输入为该单元的实际输出为而隐含层单元i的加权输入为该单元的实际输出为函数f为可微分递减函数其算法描述如下:(1)初始化网络及学习参数,如设置网络初始权矩阵、学习因子等。
(2)提供训练模式,训练网络,直到满足学习要求。(3)前向传播过程:对给定训练模式输入,计算网络的输出模式,并与期望模式比较,若有误差,则执行(4);否则,返回(2)。
(4)后向传播过程:a.计算同一层单元的误差;b.修正权值和阈值;c.返回(2)二、BP网络隐层个数的选择对于含有一个隐层的三层BP网络可以实现输入到输出的任何非线性映射。
增加网络隐层数可以降低误差,提高精度,但同时也使网络复杂化,增加网络的训练时间。误差精度的提高也可以通过增加隐层结点数来实现。一般情况下,应优先考虑增加隐含层的结点数。
三、隐含层神经元个数的选择当用神经网络实现网络映射时,隐含层神经元个数直接影响着神经网络的学习能力和归纳能力。
隐含层神经元数目较少时,网络每次学习的时间较短,但有可能因为学习不足导致网络无法记住全部学习内容;隐含层神经元数目较大时,学习能力增强,网络每次学习的时间较长,网络的存储容量随之变大,导致网络对未知输入的归纳能力下降,因为对隐含层神经元个数的选择尚无理论上的指导,一般凭经验确定。
四、神经网络图像识别系统人工神经网络方法实现模式识别,可处理一些环境信息十分复杂,背景知识不清楚,推理规则不明确的问题,允许样品有较大的缺损、畸变,神经网络方法的缺点是其模型在不断丰富完善中,目前能识别的模式类还不够多,神经网络方法允许样品有较大的缺损和畸变,其运行速度快,自适应性能好,具有较高的分辨率。
神经网络的图像识别系统是神经网络模式识别系统的一种,原理是一致的。一般神经网络图像识别系统由预处理,特征提取和神经网络分类器组成。预处理就是将原始数据中的无用信息删除,平滑,二值化和进行幅度归一化等。
神经网络图像识别系统中的特征提取部分不一定存在,这样就分为两大类:①有特征提取部分的:这一类系统实际上是传统方法与神经网络方法技术的结合,这种方法可以充分利用人的经验来获取模式特征以及神经网络分类能力来识别目标图像。
特征提取必须能反应整个图像的特征。但它的抗干扰能力不如第2类。
②无特征提取部分的:省去特征抽取,整副图像直接作为神经网络的输入,这种方式下,系统的神经网络结构的复杂度大大增加了,输入模式维数的增加导致了网络规模的庞大。
此外,神经网络结构需要完全自己消除模式变形的影响。但是网络的抗干扰性能好,识别率高。当BP网用于分类时,首先要选择各类的样本进行训练,每类样本的个数要近似相等。
其原因在于一方面防止训练后网络对样本多的类别响应过于敏感,而对样本数少的类别不敏感。另一方面可以大幅度提高训练速度,避免网络陷入局部最小点。
由于BP网络不具有不变识别的能力,所以要使网络对模式的平移、旋转、伸缩具有不变性,要尽可能选择各种可能情况的样本。
例如要选择不同姿态、不同方位、不同角度、不同背景等有代表性的样本,这样可以保证网络有较高的识别率。
构造神经网络分类器首先要选择适当的网络结构:神经网络分类器的输入就是图像的特征向量;神经网络分类器的输出节点应该是类别数。隐层数要选好,每层神经元数要合适,目前有很多采用一层隐层的网络结构。
然后要选择适当的学习算法,这样才会有很好的识别效果。
在学习阶段应该用大量的样本进行训练学习,通过样本的大量学习对神经网络的各层网络的连接权值进行修正,使其对样本有正确的识别结果,这就像人记数字一样,网络中的神经元就像是人脑细胞,权值的改变就像是人脑细胞的相互作用的改变,神经网络在样本学习中就像人记数字一样,学习样本时的网络权值调整就相当于人记住各个数字的形象,网络权值就是网络记住的内容,网络学习阶段就像人由不认识数字到认识数字反复学习过程是一样的。
神经网络是按整个特征向量的整体来记忆图像的,只要大多数特征符合曾学习过的样本就可识别为同一类别,所以当样本存在较大噪声时神经网络分类器仍可正确识别。
在图像识别阶段,只要将图像的点阵向量作为神经网络分类器的输入,经过网络的计算,分类器的输出就是识别结果。五、仿真实验1、实验对象本实验用MATLAB完成了对神经网络的训练和图像识别模拟。
从实验数据库中选择0~9这十个数字的BMP格式的目标图像。图像大小为16×8像素,每个目标图像分别加10%、20%、30%、40%、50%大小的随机噪声,共产生60个图像样本。
将样本分为两个部分,一部分用于训练,另一部分用于测试。实验中用于训练的样本为40个,用于测试的样本为20个。随机噪声调用函数randn(m,n)产生。
2、网络结构本试验采用三层的BP网络,输入层神经元个数等于样本图像的象素个数16×8个。隐含层选24个神经元,这是在试验中试出的较理想的隐层结点数。
输出层神经元个数就是要识别的模式数目,此例中有10个模式,所以输出层神经元选择10个,10个神经元与10个模式一一对应。
3、基于MATLAB语言的网络训练与仿真建立并初始化网络% ================S1 = 24;% 隐层神经元数目S1 选为24[R,Q] = size(numdata);[S2,Q] = size(targets);F = numdata;P=double(F);net = newff(minmax(P),[S1 S2],{'logsig''logsig'},'traingda','learngdm')这里numdata为训练样本矩阵,大小为128×40,targets为对应的目标输出矩阵,大小为10×40。
newff(PR,[S1S2…SN],{TF1TF2…TFN},BTF,BLF,PF)为MATLAB函数库中建立一个N层前向BP网络的函数,函数的自变量PR表示网络输入矢量取值范围的矩阵[Pminmax];S1~SN为各层神经元的个数;TF1~TFN用于指定各层神经元的传递函数;BTF用于指定网络的训练函数;BLF用于指定权值和阀值的学习函数;PF用于指定网络的性能函数,缺省值为‘mse’。
设置训练参数net.performFcn = 'sse'; %平方和误差性能函数 = 0.1; %平方和误差目标 = 20; %进程显示频率net.trainParam.epochs = 5000;%最大训练步数 = 0.95; %动量常数网络训练net=init(net);%初始化网络[net,tr] = train(net,P,T);%网络训练对训练好的网络进行仿真D=sim(net,P);A = sim(net,B);B为测试样本向量集,128×20的点阵。
D为网络对训练样本的识别结果,A为测试样本的网络识别结果。实验结果表明:网络对训练样本和对测试样本的识别率均为100%。如图为64579五个数字添加50%随机噪声后网络的识别结果。
六、总结从上述的试验中已经可以看出,采用神经网络识别是切实可行的,给出的例子只是简单的数字识别实验,要想在网络模式下识别复杂的目标图像则需要降低网络规模,增加识别能力,原理是一样的。
BP人工神经网络
人工神经网络(artificialneuralnetwork,ANN)指由大量与自然神经系统相类似的神经元联结而成的网络,是用工程技术手段模拟生物网络结构特征和功能特征的一类人工系统。
神经网络不但具有处理数值数据的一般计算能力,而且还具有处理知识的思维、学习、记忆能力,它采用类似于“黑箱”的方法,通过学习和记忆,找出输入、输出变量之间的非线性关系(映射),在执行问题和求解时,将所获取的数据输入到已经训练好的网络,依据网络学到的知识进行网络推理,得出合理的答案与结果。
岩土工程中的许多问题是非线性问题,变量之间的关系十分复杂,很难用确切的数学、力学模型来描述。
工程现场实测数据的代表性与测点的位置、范围和手段有关,有时很难满足传统统计方法所要求的统计条件和规律,加之岩土工程信息的复杂性和不确定性,因而运用神经网络方法实现岩土工程问题的求解是合适的。
BP神经网络模型是误差反向传播(BackPagation)网络模型的简称。它由输入层、隐含层和输出层组成。
网络的学习过程就是对网络各层节点间连接权逐步修改的过程,这一过程由两部分组成:正向传播和反向传播。
正向传播是输入模式从输入层经隐含层处理传向输出层;反向传播是均方误差信息从输出层向输入层传播,将误差信号沿原来的连接通路返回,通过修改各层神经元的权值,使得误差信号最小。
BP神经网络模型在建立及应用过程中,主要存在的不足和建议有以下四个方面:(1)对于神经网络,数据愈多,网络的训练效果愈佳,也更能反映实际。
但在实际操作中,由于条件的限制很难选取大量的样本值进行训练,样本数量偏少。(2)BP网络模型其计算速度较慢、无法表达预测量与其相关参数之间亲疏关系。
(3)以定量数据为基础建立模型,若能收集到充分资料,以定性指标(如基坑降水方式、基坑支护模式、施工工况等)和一些易获取的定量指标作为输入层,以评价等级作为输出层,这样建立的BP网络模型将更准确全面。
(4)BP人工神经网络系统具有非线性、智能的特点。
较好地考虑了定性描述和定量计算、精确逻辑分析和非确定性推理等方面,但由于样本不同,影响要素的权重不同,以及在根据先验知识和前人的经验总结对定性参数进行量化处理,必然会影响评价的客观性和准确性。
因此,在实际评价中只有根据不同的基坑施工工况、不同的周边环境条件,应不同用户的需求,选择不同的分析指标,才能满足复杂工况条件下地质环境评价的要求,取得较好的应用效果。
Matlab构建BP神经网络提取数字图像边缘 100
在加工每一针前根据设定轨迹、运动参数、物料材质、当前加工位置等先用BP神经网络得到加工点粗略的变形量,对加工轨迹进行预补偿。
加工时动态采集加工点的局部图像,经数字图像处理得到加工点实际坐标与设定坐标的偏差值,一方面将所得值作为神经网络的输出样本,结合相关参数对神经网络进行在线培训,另一方面将此偏差值与加工点设定坐标之和(即加工点实际坐标)用神经网络的输出进行预补偿,求出其与针头实际位置的差值作为PID控制器的输入,从而提高控制系统的动态特性,实现快速精确绗缝的自动化加工。
关于BP神经网络的一个问题
不知你是不是用matlab的神经网络工具箱,因为一般神经网络都是成批处理的,每一次调整都会综合所有样本的误差进行调整,而不是一类一类图片的去调整,所以不会出现你说的现象。
目前我看过的很多C++或者其它语言自己写的神经网络,都会有这样或那样的理解错误,建议先使用现成的matlab的神经网络工具箱进行训练。另外是输入的问题,图象一般会先提取特征,再将特征作为输入。
你在贴吧也提问了吧,这个我在贴吧里也回答了。
输出的问题,一般模式识别会用01向量来代表,例如你有三类,目标输出应该是[010]这样,来代表它是第2类,训练的时候用010,当然,预测到的可能是[0.10.90.1]这样。
本人新手,在做BP神经网络的时候遇到了一个问题 5
不知你是不是用matlab的神经网络工具箱,因为一般神经网络都是成批处理的,每一次调整都会综合所有样本的误差进行调整,而不是一类一类图片的去调整,所以不会出现你说的现象。
目前我看过的很多C++或者其它语言自己写的神经网络,都会有这样或那样的理解错误,建议先使用现成的matlab的神经网络工具箱进行训练。另外是输入的问题,图象一般会先提取特征,再将特征作为输入。
你在贴吧也提问了吧,这个我在贴吧里也回答了。
输出的问题,一般模式识别会用01向量来代表,例如你有三类,目标输出应该是[010]这样,来代表它是第2类,训练的时候用010,当然,预测到的可能是[0.10.90.1]这样。
这是我所想到的问题,楼主看看是不是这样一回事。下面是我的一些建议:改为用神经网络工具箱。借鉴《MATLAB神经网络原理与实例精解》里的基于概率神经网络的手写体数字识别,对图象作预处理。
参考2012Bmatlab\R2012b\toolbox\nnet\nndemos下的classify_crab_demo例子。调用patternnet建立模式识别网络。
可以到《神经网络之家》 学习神经网络。
如何建立bp神经网络预测 模型
。
建立BP神经网络预测模型,可按下列步骤进行:1、提供原始数据2、训练数据预测数据提取及归一化3、BP网络训练4、BP网络预测5、结果分析现用一个实际的例子,来预测2015年和2016年某地区的人口数。
已知2009年——2014年某地区人口数分别为3583、4150、5062、4628、5270、5340万人执行BP_main程序,得到[2015, 5128.呵呵3946380615234375][2016,5100.5797325642779469490051269531]代码及图形如下。