stm32 对输入输出的控制是通过读写对应的寄存器来实现的。
控制gpio的寄存器可以看作是这样的结构体:
typedef struct
{
__IO uint32_t CRL;
__IO uint32_t CRH;
__IO uint32_t IDR;
__IO uint32_t ODR;
__IO uint32_t BSRR;
__IO uint32_t BRR;
__IO uint32_t LCKR;
} GPIO_TypeDef;
CRL与CRH储存输出频率与输入输出模式(CRL储存0-7号,CRH储存8-15号)
IDR是输入数据寄存器,储存了输入到该端口的寄存器,储存方式是如果引脚x输入1,则IDR的第x位为1,若输入0则第x位为0.
ODR是输出数据寄存器,储存了输出到该端口的寄存器,如果想让引脚x输出1,则在x为储存1,如果输出0则在x+8为储存1.
BSRR是置位数据寄存器,如果想让引脚x输出1,则在x为储存1,如果输出0则在x+8为储存1.
我们常用STM32CubeMX配置GPIO
而stm32CubeMX是通过HAL库来控制GPIO的
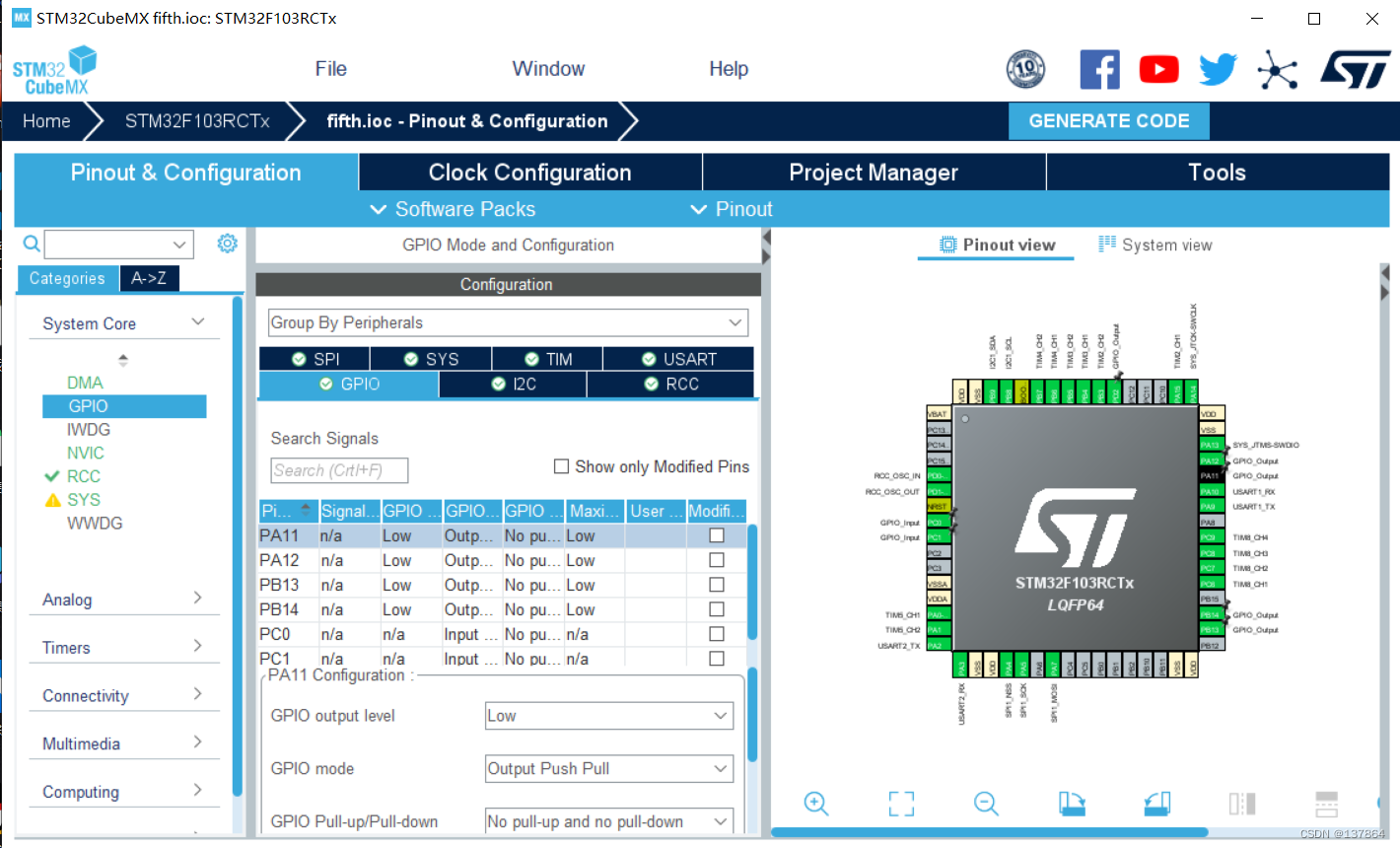
下面会通过详解HAL库中的具体代码解释这些寄存器
一、输入输出
输出:
void HAL_GPIO_WritePin(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState)
{
/* Check the parameters */
assert_param(IS_GPIO_PIN(GPIO_Pin));
assert_param(IS_GPIO_PIN_ACTION(PinState));
if (PinState != GPIO_PIN_RESET)
{
GPIOx->BSRR = GPIO_Pin;
}
else
{
GPIOx->BSRR = (uint32_t)GPIO_Pin << 16u;
}
}
如果输出1,则在BSRR对应位置1,如果输出0,则在BSRR对应位+8置1,单片机会根据BSRR修改ODR从而输出指定信号。
输入:
GPIO_PinState HAL_GPIO_ReadPin(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin)
{
GPIO_PinState bitstatus;
/* Check the parameters */
assert_param(IS_GPIO_PIN(GPIO_Pin));
if ((GPIOx->IDR & GPIO_Pin) != (uint32_t)GPIO_PIN_RESET)
{
bitstatus = GPIO_PIN_SET;
}
else
{
bitstatus = GPIO_PIN_RESET;
}
return bitstatus;
}
如果输入1,那么IDR寄存器对应位就会置1,如果为0则置0.
还有一个翻转引脚输出:
void HAL_GPIO_TogglePin(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin)
{
uint32_t odr;
/* Check the parameters */
assert_param(IS_GPIO_PIN(GPIO_Pin));
/* get current Ouput Data Register value */
odr = GPIOx->ODR;
/* Set selected pins that were at low level, and reset ones that were high */
GPIOx->BSRR = ((odr & GPIO_Pin) << GPIO_NUMBER) | (~odr & GPIO_Pin);
}
如果原先输出1则现在输出0,如果原先输出0则现在输出1.
二、初始化
初始化的过程大概是:
时钟使能->初始化输出(高低电平)->初始化其他配置
代码:
void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_GPIOC_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_13|GPIO_PIN_14, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_11|GPIO_PIN_12, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);
/*Configure GPIO pins : PB13 PB14 */
GPIO_InitStruct.Pin = GPIO_PIN_13|GPIO_PIN_14;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/*Configure GPIO pins : PA11 PA12 */
GPIO_InitStruct.Pin = GPIO_PIN_11|GPIO_PIN_12;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/*Configure GPIO pin : PD2 */
GPIO_InitStruct.Pin = GPIO_PIN_2;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOD, &GPIO_InitStruct);
}
时钟使能在后面的文章中再详细说明
初始化输出前面已经说过
而这个“其他配置”相对复杂(或者说过于复杂),HAL库中的代码是这样的:
void HAL_GPIO_Init(GPIO_TypeDef *GPIOx, GPIO_InitTypeDef *GPIO_Init)
{
uint32_t position = 0x00u;
uint32_t ioposition;
uint32_t iocurrent;
uint32_t temp;
uint32_t config = 0x00u;
__IO uint32_t *configregister; /* Store the address of CRL or CRH register based on pin number */
uint32_t registeroffset; /* offset used during computation of CNF and MODE bits placement inside CRL or CRH register */
/* Check the parameters */
assert_param(IS_GPIO_ALL_INSTANCE(GPIOx));
assert_param(IS_GPIO_PIN(GPIO_Init->Pin));
assert_param(IS_GPIO_MODE(GPIO_Init->Mode));
/* Configure the port pins */
while (((GPIO_Init->Pin) >> position) != 0x00u)
{
/* Get the IO position */
ioposition = (0x01uL << position);
/* Get the current IO position */
iocurrent = (uint32_t)(GPIO_Init->Pin) & ioposition;
if (iocurrent == ioposition)
{
/* Check the Alternate function parameters */
assert_param(IS_GPIO_AF_INSTANCE(GPIOx));
/* Based on the required mode, filling config variable with MODEy[1:0] and CNFy[3:2] corresponding bits */
switch (GPIO_Init->Mode)
{
/* If we are configuring the pin in OUTPUT push-pull mode */
case GPIO_MODE_OUTPUT_PP:
/* Check the GPIO speed parameter */
assert_param(IS_GPIO_SPEED(GPIO_Init->Speed));
config = GPIO_Init->Speed + GPIO_CR_CNF_GP_OUTPUT_PP;
break;
/* If we are configuring the pin in OUTPUT open-drain mode */
case GPIO_MODE_OUTPUT_OD:
/* Check the GPIO speed parameter */
assert_param(IS_GPIO_SPEED(GPIO_Init->Speed));
config = GPIO_Init->Speed + GPIO_CR_CNF_GP_OUTPUT_OD;
break;
/* If we are configuring the pin in ALTERNATE FUNCTION push-pull mode */
case GPIO_MODE_AF_PP:
/* Check the GPIO speed parameter */
assert_param(IS_GPIO_SPEED(GPIO_Init->Speed));
config = GPIO_Init->Speed + GPIO_CR_CNF_AF_OUTPUT_PP;
break;
/* If we are configuring the pin in ALTERNATE FUNCTION open-drain mode */
case GPIO_MODE_AF_OD:
/* Check the GPIO speed parameter */
assert_param(IS_GPIO_SPEED(GPIO_Init->Speed));
config = GPIO_Init->Speed + GPIO_CR_CNF_AF_OUTPUT_OD;
break;
/* If we are configuring the pin in INPUT (also applicable to EVENT and IT mode) */
case GPIO_MODE_INPUT:
case GPIO_MODE_IT_RISING:
case GPIO_MODE_IT_FALLING:
case GPIO_MODE_IT_RISING_FALLING:
case GPIO_MODE_EVT_RISING:
case GPIO_MODE_EVT_FALLING:
case GPIO_MODE_EVT_RISING_FALLING:
/* Check the GPIO pull parameter */
assert_param(IS_GPIO_PULL(GPIO_Init->Pull));
if (GPIO_Init->Pull == GPIO_NOPULL)
{
config = GPIO_CR_MODE_INPUT + GPIO_CR_CNF_INPUT_FLOATING;
}
else if (GPIO_Init->Pull == GPIO_PULLUP)
{
config = GPIO_CR_MODE_INPUT + GPIO_CR_CNF_INPUT_PU_PD;
/* Set the corresponding ODR bit */
GPIOx->BSRR = ioposition;
}
else /* GPIO_PULLDOWN */
{
config = GPIO_CR_MODE_INPUT + GPIO_CR_CNF_INPUT_PU_PD;
/* Reset the corresponding ODR bit */
GPIOx->BRR = ioposition;
}
break;
/* If we are configuring the pin in INPUT analog mode */
case GPIO_MODE_ANALOG:
config = GPIO_CR_MODE_INPUT + GPIO_CR_CNF_ANALOG;
break;
/* Parameters are checked with assert_param */
default:
break;
}
/* Check if the current bit belongs to first half or last half of the pin count number
in order to address CRH or CRL register*/
configregister = (iocurrent < GPIO_PIN_8) ? &GPIOx->CRL : &GPIOx->CRH;
registeroffset = (iocurrent < GPIO_PIN_8) ? (position << 2u) : ((position - 8u) << 2u);
/* Apply the new configuration of the pin to the register */
MODIFY_REG((*configregister), ((GPIO_CRL_MODE0 | GPIO_CRL_CNF0) << registeroffset), (config << registeroffset));
/*--------------------- EXTI Mode Configuration ------------------------*/
/* Configure the External Interrupt or event for the current IO */
if ((GPIO_Init->Mode & EXTI_MODE) == EXTI_MODE)
{
/* Enable AFIO Clock */
__HAL_RCC_AFIO_CLK_ENABLE();
temp = AFIO->EXTICR[position >> 2u];
CLEAR_BIT(temp, (0x0Fu) << (4u * (position & 0x03u)));
SET_BIT(temp, (GPIO_GET_INDEX(GPIOx)) << (4u * (position & 0x03u)));
AFIO->EXTICR[position >> 2u] = temp;
/* Configure the interrupt mask */
if ((GPIO_Init->Mode & GPIO_MODE_IT) == GPIO_MODE_IT)
{
SET_BIT(EXTI->IMR, iocurrent);
}
else
{
CLEAR_BIT(EXTI->IMR, iocurrent);
}
/* Configure the event mask */
if ((GPIO_Init->Mode & GPIO_MODE_EVT) == GPIO_MODE_EVT)
{
SET_BIT(EXTI->EMR, iocurrent);
}
else
{
CLEAR_BIT(EXTI->EMR, iocurrent);
}
/* Enable or disable the rising trigger */
if ((GPIO_Init->Mode & RISING_EDGE) == RISING_EDGE)
{
SET_BIT(EXTI->RTSR, iocurrent);
}
else
{
CLEAR_BIT(EXTI->RTSR, iocurrent);
}
/* Enable or disable the falling trigger */
if ((GPIO_Init->Mode & FALLING_EDGE) == FALLING_EDGE)
{
SET_BIT(EXTI->FTSR, iocurrent);
}
else
{
CLEAR_BIT(EXTI->FTSR, iocurrent);
}
}
}
position++;
}
}程序会通过position寻找被初始化的端口号(这其实是不必要的,如果不用HAL库显然可以写出更精简且高效的算法),随后会配置模式、频率并写入对应的寄存器。
写入寄存器的命令用的是:
#define SET_BIT(REG, BIT) ((REG) |= (BIT))
#define CLEAR_BIT(REG, BIT) ((REG) &= ~(BIT))
#define READ_BIT(REG, BIT) ((REG) & (BIT))
#define CLEAR_REG(REG) ((REG) = (0x0))
#define WRITE_REG(REG, VAL) ((REG) = (VAL))
#define READ_REG(REG) ((REG))
#define MODIFY_REG(REG, CLEARMASK, SETMASK) WRITE_REG((REG), (((READ_REG(REG)) & (~(CLEARMASK))) | (SETMASK)))
#define POSITION_VAL(VAL) (__CLZ(__RBIT(VAL)))
本质上还是位运算,即通过修改对应位上的0/1数据来控制端口。
三、中断
HAL库提供了一个中断接口
void HAL_GPIO_EXTI_IRQHandler(uint16_t GPIO_Pin)
{
/* EXTI line interrupt detected */
if (__HAL_GPIO_EXTI_GET_IT(GPIO_Pin) != 0x00u)
{
__HAL_GPIO_EXTI_CLEAR_IT(GPIO_Pin);
HAL_GPIO_EXTI_Callback(GPIO_Pin);
}
}
对应一个中断回调函数
__weak void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
/* Prevent unused argument(s) compilation warning */
UNUSED(GPIO_Pin);
/* NOTE: This function Should not be modified, when the callback is needed,
the HAL_GPIO_EXTI_Callback could be implemented in the user file
*/
}
个人感觉用的不多,也没什么好解释的。
综上,单片机的GPIO大多是通过寄存器控制的,而HAL库主要是封装了复杂的对寄存器的操作,
只给我们留出来一些简单的接口。事实上,从上面的分析可以发现HAL库代码的效率并不高,有时
不如我们自己编写的代码,但对于初学者来说,这样的封装大大降低了学习的难度。至于如何取舍
还得看实际应用的需要。