gazebo 仿真器搭建三维虚拟环境
一、gazebo搭建三维虚拟环境
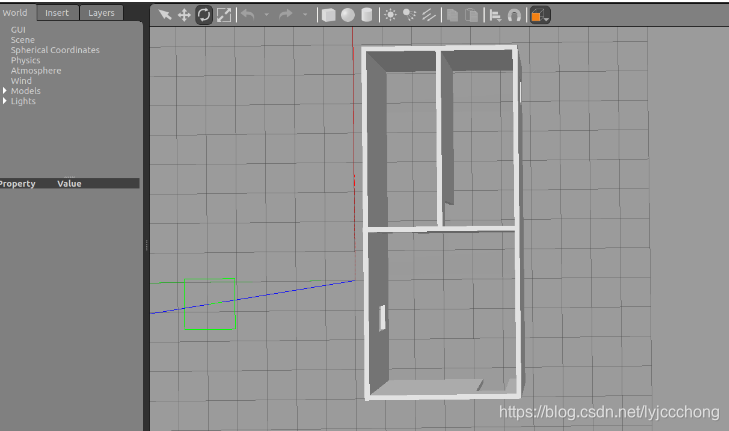
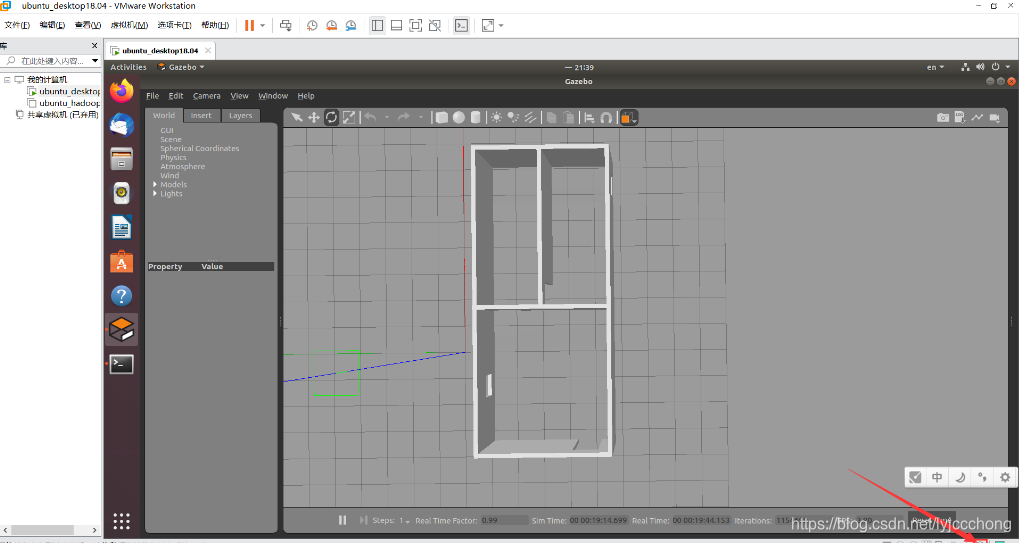
1.打开gazebo
在终端输入gazebo即可
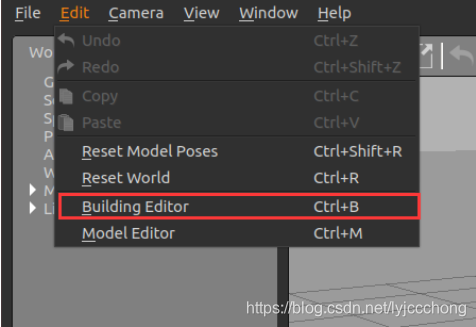
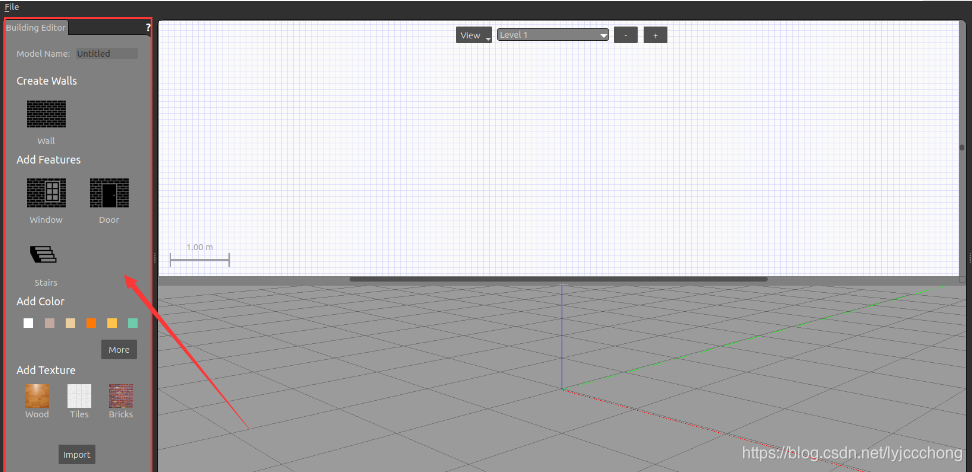
2.打开Building Editor,利用左边的Create Walls、Add Features搭建虚拟环境
4.保存
二、Rviz安装
2.1. 安装准备
切换虚拟机usb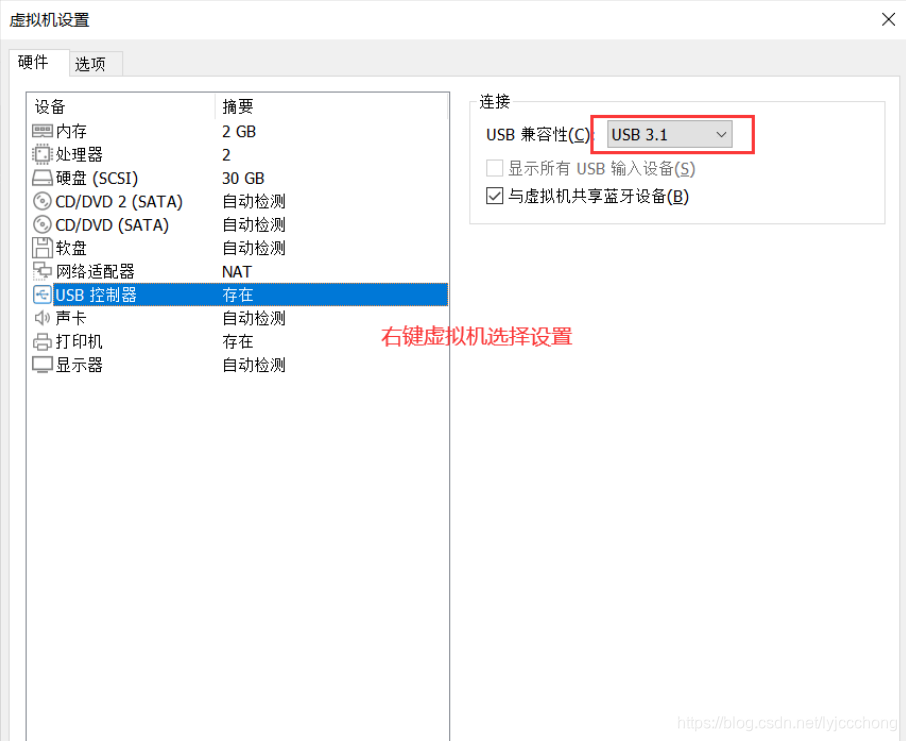
连接虚拟机摄像头
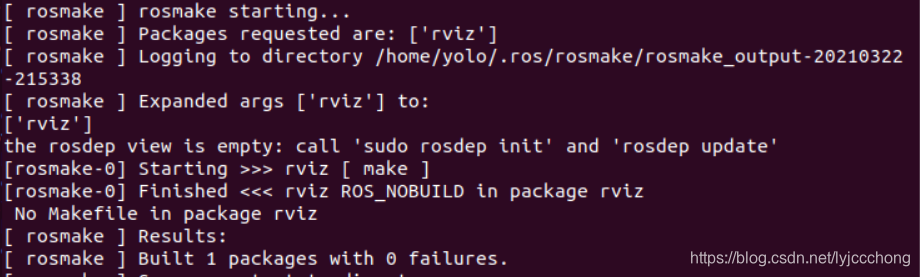
2.2. 安装Rviz
编译rosmake rviz
运行
roscore
rosrun rviz rviz
打开界面如下
2.3. 调用摄像头显示
安装uvc camera功能包
sudo apt-get install ros-melodic-uvc-camera
安装image相关功能包
sudo apt-get install ros-melodic-image-*
sudo apt-get install ros-melodic-rqt-image-view
启动Ros的核心程序
roscore
2.4使用Rviz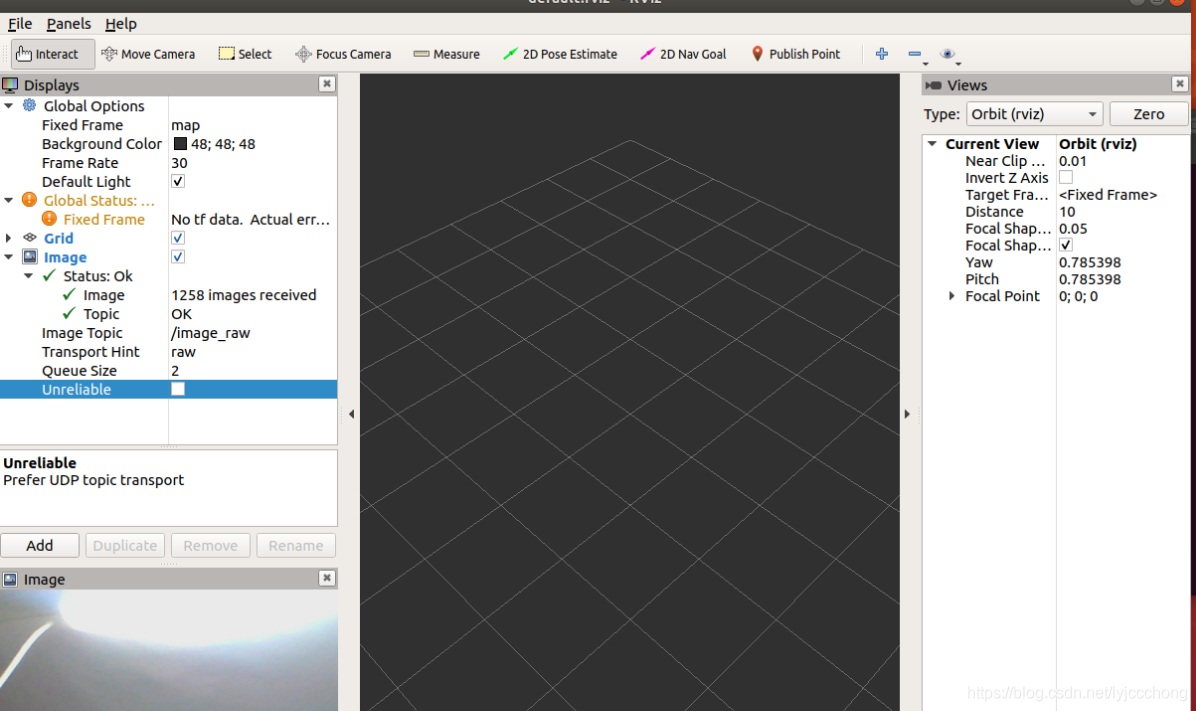
版权声明:本文为lyjccchong原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。