转载自:双目测距的基本公式推导
尊重原创,请看原文
0. 基本假设
假设双目系统是标准形式,即:
- 两相机内参数相同,即焦距、分辨率等参数一致;
- 两相机光轴平行;
- 成像平面处于同一水平线;
两相机只存在X轴方向上的平移变换。
1. 几何法
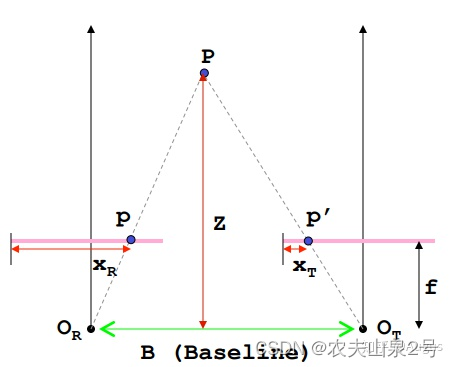
P是待测物体上的某一点,OR与OT分别是两个相机的光心,点P在两个相机感光器上的成像点分别为P和P’(相机的成像平面经过旋转后放在了镜头前方),f为相机焦距,B为两相机中心距,Z为我们想求得的深度信息。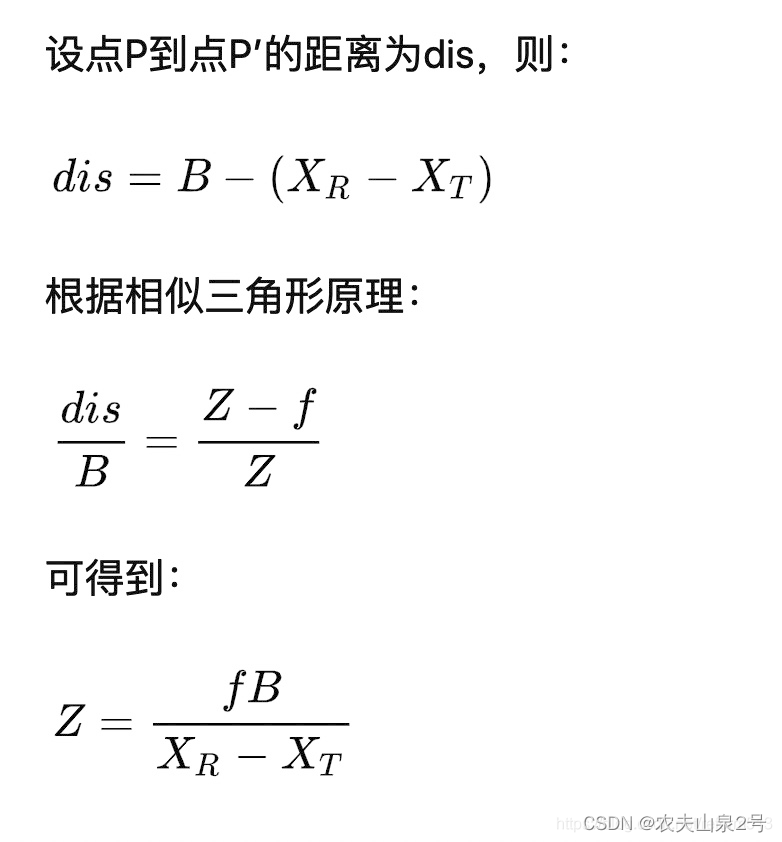
公式中,焦距f和摄像头中心距B可通过标定得到,因此,只要获得了视差d=XR−XT,就可以计算出深度Z。