
点击箭头处蓝色字 “iFTrue未来已来”关注我哦~
核心概览
——《电力电子基础 Power Electrics》系列(之)控制器设计 1 概述 2 负反馈对网络传递函数的影响2.1 反馈环节的特点:减小“扰动-输出”传递函数
2.2 反馈环节的特点:降低“给定-输出”传递函数对前向通道增益变化的敏感性 3 重要参量1/(1+T)与T/(1+T)的释义 4 稳定性 4.1 相角裕度测试
4.2 相位裕度与闭环阻尼系数的关系 5 调节器设计
5.1 超前校正器(PD)
5.2 滞后校正器(PI)
5.3 超前-滞后(PID)校正器
5.4 设计举例 6 开环增益的测量
6.1 电压注入法
6.2 电流注入法
6.3 不稳定系统的测量 7 关键点总结
5 调节器设计(上)
▼
如何设计一个调节器,在考虑扰动抑制、动态响应和稳定性的条件下,使得系统满足设计要求?典型的直流调节其一般使用以下指标:
1) 负载电流变化对输出电压调节的影响
当负载电流变化时,输出电压必须维持在某个可接受的范围内,这限制了最大允许输出阻抗。
2) 输入电压变化对输出电压调节的影响
这限制了允许的最大“扰动-输出”传输函数。为了减小输出电压谐波,可以增大在谐波频率处的开环增益。
3) 动态响应时间
这需要足够高的截止频率。
4) 超调与振铃
必须获得足够的相位裕度。
超前校正器(PD)
超前校正器(PD)通常用来提高系统的相角裕度。在距离截止频率fc足够远的频率fz处,增加一个零点以使得开环传函T(s)的相角裕度达到期望值,可以增加反馈环路的带宽(截止频率fc得到了提高)。PD校正器通常用在原始系统包含两个极点的应用中。
其传递函数如下,包含一个低频零点和一个高频极点,对数幅频/相频特性曲线如图1所示
PD校正器的最大相角位于极点和零点频率的均方根处
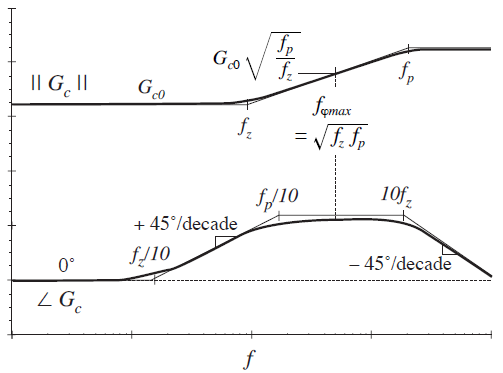
图1 PD校正器的数幅频/相频特性曲线
相频特性中最大相角超前量与PD校正器零极点频率的关系为:
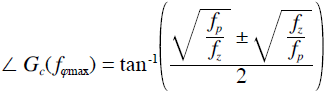
关系曲线如图2所示
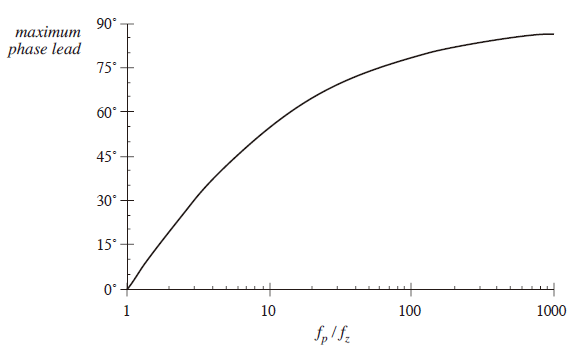
图2 PD校正器最大相角超前量与零极点频率比fp / fz的关系
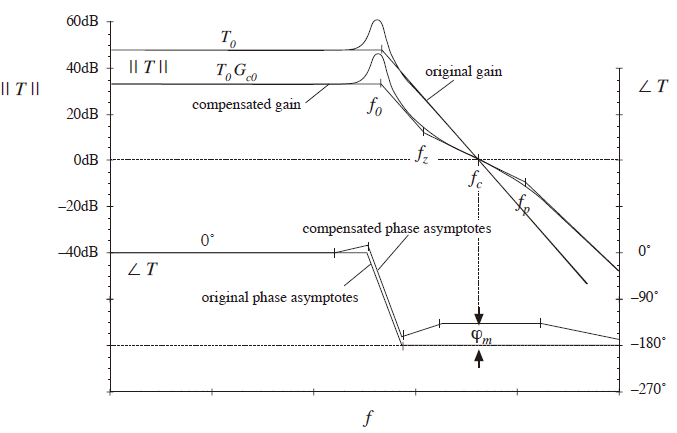
一个典型具有两个极点的系统开环传函的幅频/相频对数特性曲线如图3所示,原系统开环传函的相角裕度较小(接近0°)。这里采用PD校正器,增大了相角裕度并保持原截止频率fc不变。
滞后校正器(PI)
该类型校正器通常用来提高低频开环增益,使得输出量在零频段和低于截止频率时有较好的调节度。其传递函数如下,幅频/相频对数特性曲线如图4所示。PI校正器相当于在开环增益频率为fL的位置增加了一个零点。
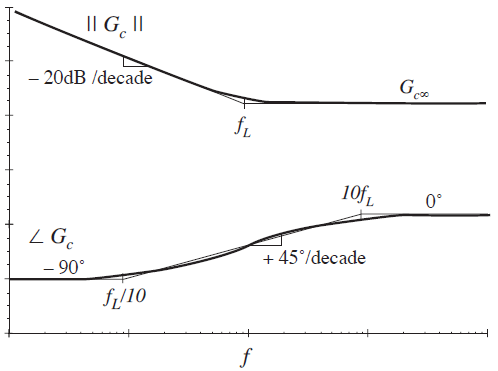
图4 PI校正器的数幅频/相频特性曲线
在一定程度上,补偿器增益在直流段可以无限大,直流段的开环增益T(0)将变得无限大。这将使得误差信号的直流偏置量趋近于0,因此,稳态输出电压将会得到很好的调节,并且在直流段的“扰动-输出”传递函数将会趋近于0。 PI校正器在几乎所有类型的反馈系统中都是有用的,尤其对于仅包含单极点的原始系统 来说,它是一种特别简单和有效的方法 。示例:滞后校正器
原始系统(未添加校正器)的开环增益为
设计策略选择: G c∞ 用来获得期望的截至频率
ω L 设计得足够小以获得足够的相角裕度
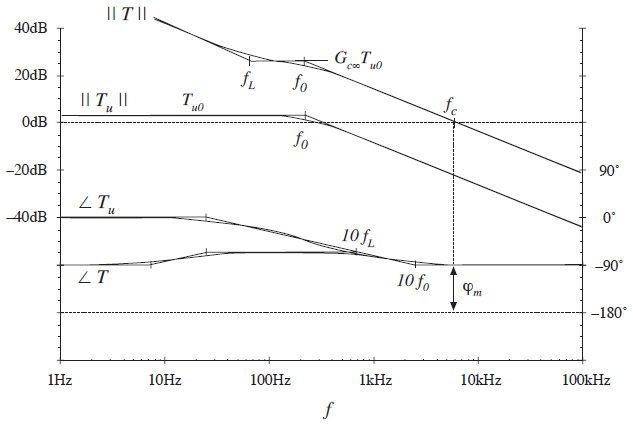
图5 开环增益包含一个单极点的系统的校正,采用PI校正器,增大开环增益
校正后的系统开环增益为T(s)=Tu(s)Gc(s),校正器开环增益Gc∞用来获得期望的截至频率fc。我们可以用高频时的渐近线来近似表示开环增益:
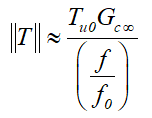
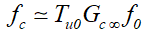
在截至频率处(f = fc),对数幅频特性为0dB,开环增益|| T ||为1,则可得截至频率为
转折频率fL选择远远小于截止频率fc的值,以获得足够的相角裕度。
1/(1+T(s))的对数幅频特性曲线如图6所示。当频率小于f L 时,PI校正器提升了系统的抗扰动能力。在直流频段时,G c 趋近无穷大,1/(1 + T(s))趋近0,因而,在直流频段时闭环“扰动-输出”传函趋近0。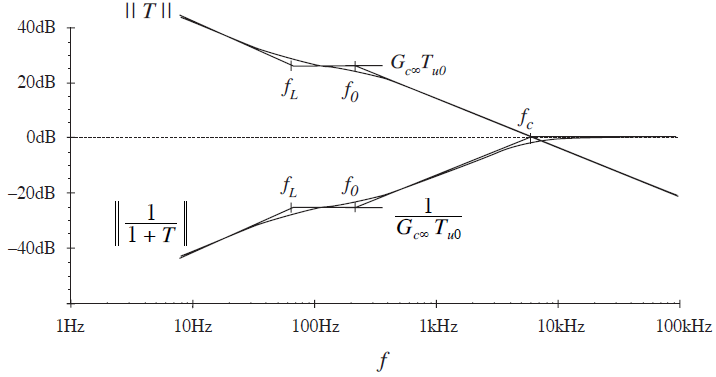
超前-滞后(PID)校正器
通过结合超前(PD)和滞后(PI)校正器的优点,可以在增大带宽的基础上到达消除稳态误差的目的,结合后的校正器成为PID校正器。
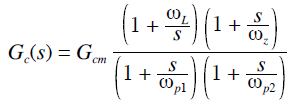
PID校正器的传递函数如下,幅频/相频对数特性曲线如图7所示
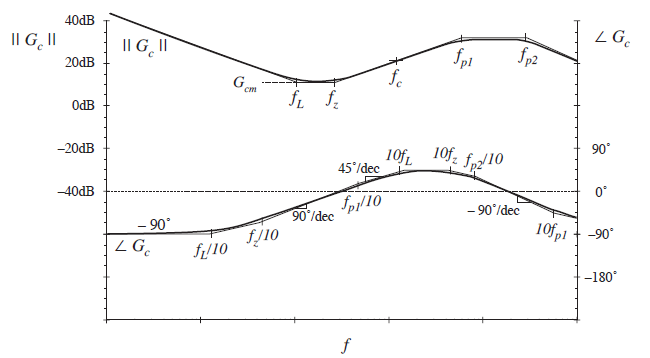
图7 PID校正器的数幅频/相频特性曲线
 加入技术交流群行业精英,快来加入
加入技术交流群行业精英,快来加入欢迎加入交流群,本群供大家进行交流,电力电子、电力传动、DSP控制器、软件算法,只要你有问题都可以在这里交流。
因目前群人数超200人,仅能邀请加入,请添加以下微信,由我拉你入群,注明:加群 + 从事/研究方向,例如:加群 逆变器软件

「 加入交流群 」