目录
四.误差
一.电机
- 三相异步电动机
定子三相对称绕组接通三相对称电源,从而产生合成旋转磁场,磁场随定子电流的交变而旋转。由电磁感应定理可知,此旋转磁场切割转子导体,在转子导体中产生感应电动势,并在转子导体中形成感应电流(右手定则)。而带电的转子导体又与旋转磁场相互作用产生电磁力F(左手定则),此电磁力乘以转子半径就形成了一个与旋转磁场同方向的电磁转矩,使转子以转速n跟随磁场旋转。
旋转磁场与转子之间必定有转速差异,一步电动机的异步就是由此而来。
- 单相交流异步电动机
当开关合在1时,由于电容C的移相作用,使u1u2绕组中的电流滞后v1v2绕组中的电流一个电角度90,有相位差的两个正弦电流产生旋转磁场,在此磁场的作用下,转子就转动起来,当开关合在2端时,u1u2绕组中的电流就超前v1v2绕组中的电流90,磁场的转向改变,电动机就反转。除了电容分相外,还有电感分相。
- 直流电动机
载流导体在磁场中受到电磁力的作用,驱动转子旋转。在定子磁场磁极极性不变时,通过电刷、换向器能保证N级和S级下的电枢绕组的电流方向不变,也就是电磁力的方向不变,因而电动机转向不变。
转差率:旋转磁场与转子之间有转速差异,两者转速差率简称转差率。
- 伺服电动机
灵敏度高,控制信号为0时,能立即停转,其转向随控制信号极性的改变而立即改变。其转子转动惯量小、转子电阻大,临界转差率大于1.。交流伺服电动机的工作原理与电容分相式单相异步电动机类似。
- 步进电机
用于数字控制系统,其功能是将电脉冲信号变换成直线位移或角位移,每输入一个电脉冲,步进电机就进一步或转一角度。
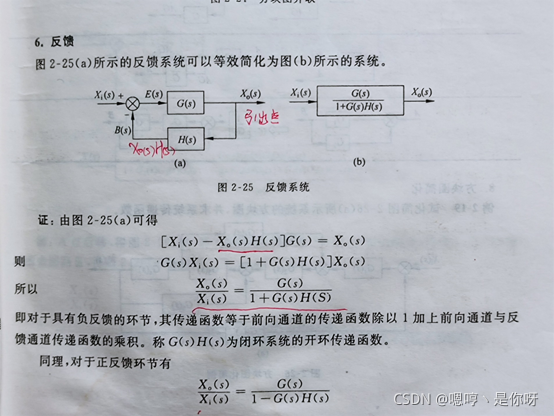
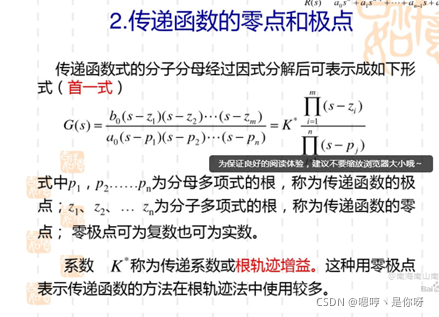
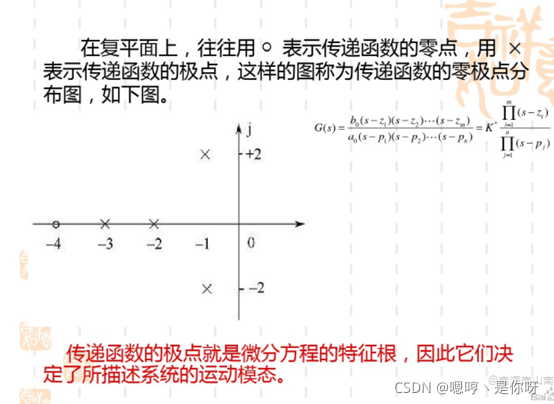
二、传递函数(零极点)
- 拉式变换中的
,输入值是复平面内的一点,有实部和虚部,输出也有实部和虚部。
- 当传递函数中的s为0时,传递函数的值K就是系统的增益(放大倍数),因为不同阶导数都为0了,只剩下比例部分了
- 传递函数一般用于单输入单输出系统,如果是多输入多输出系统,要用传递函数阵。
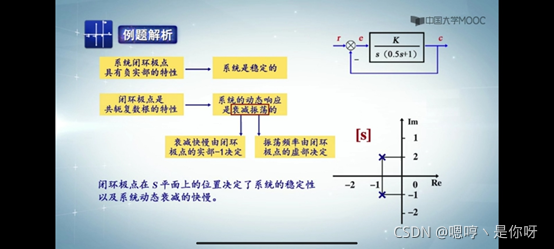
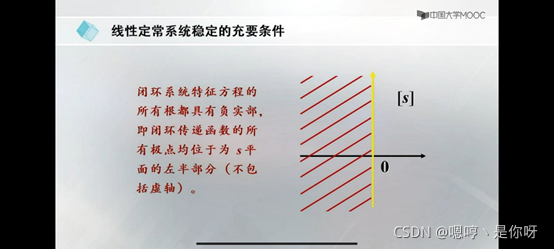
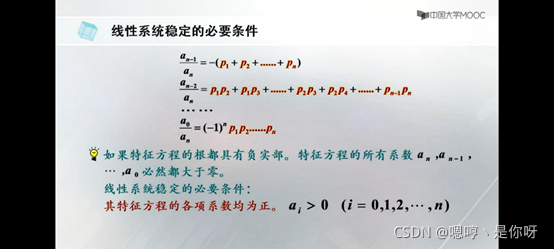
三.线性定常系统的稳定性和判定方法
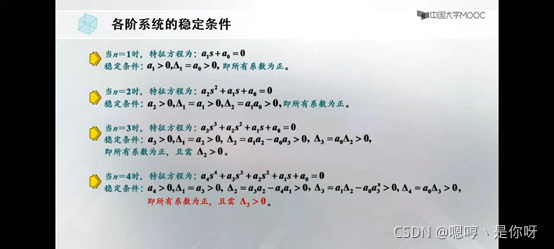
- 稳定条件
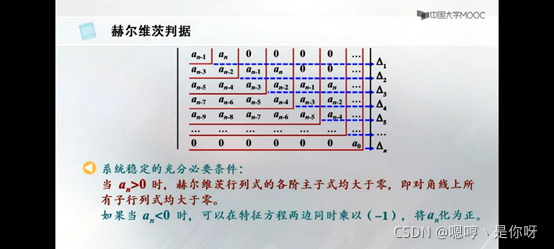
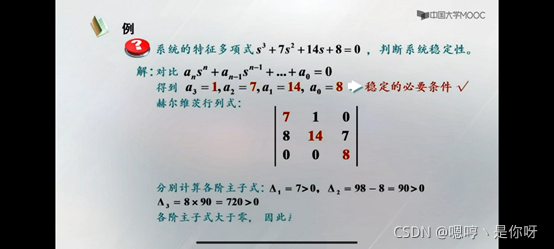
2.赫尔维兹判据
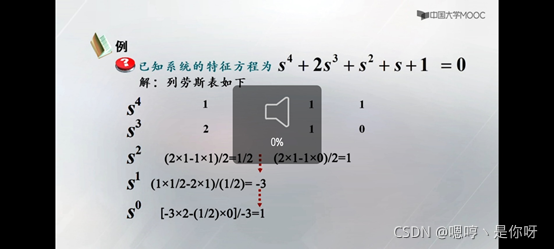
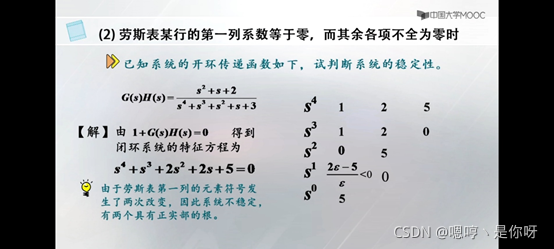
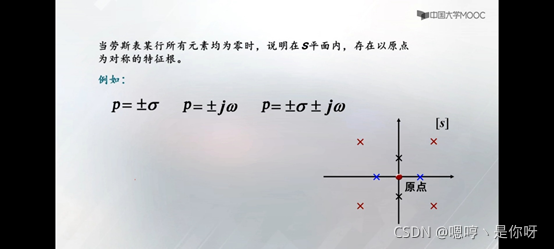
3. 劳斯判据
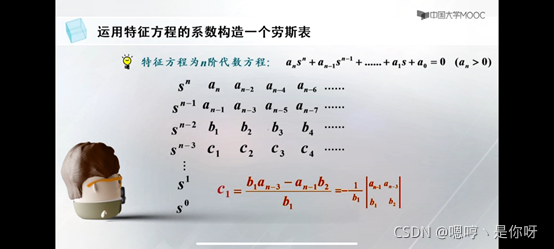
可将某一行同时乘以一个正数,判定结果不变。
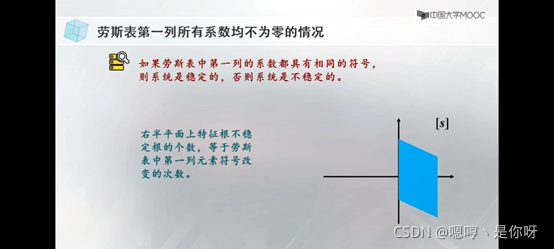
劳斯判据可以检验系统的相对稳定性。
五.误差
- 稳态误差
版权声明:本文为ZhanChiFei21580原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。