继之前提到的两种方法之后,这里再列出基于RANSAC的圆检测,RANSAC(Random Sample Consensus)随机抽样一致性,略不同于霍夫圆变换那种基于投票的策略,这是一种对观测数据进行最大化模型检验的方法。下面来简单介绍一下它的原理:
1、原理
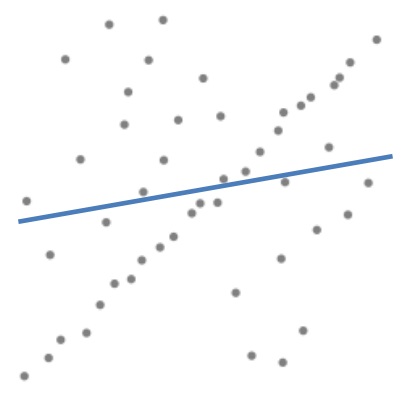
最小二乘法通常用在线性拟合参数中,但一旦最小二乘法输入的观测数据中包含有大量分散的干扰点时,它拟合出来的效果可能并不好,如可能会出现这样的情况:
可以看到,拟合出来的直线与期望有效点之间的重合率不高,也就代表着它的代价函数Cost(m,b)=∑ni=1|yi−(mxi+b)|虽然已经是最小的了,期望(不是概率论里面的期望)函数的值却不是最大的。
Ransac的思路是随机通过几个点用最小二乘法给出一个假设的直线,然后计算在直线内的inliers和在直线范围外的outliers。对所有可能的直线中找出inliers数目最多的那个,也就能找到最好的直线。
算法步骤:
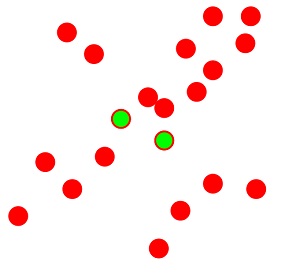
(1) 随机地抽取出所需要数目的点去拟合模型:
绿色的点代表采样的点
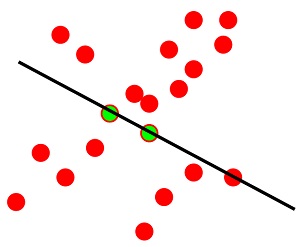
(2)用样本求出模型参数:
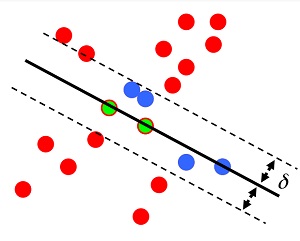
(3)在设定好直线的阈值范围中区分出inliers和outliers,并求内点占观测数据的比:
重复步骤1-3直到找出置信度最高的模型
RANSAC几点要注意的:
① 只有outliers%<50%时,得到的模型才是有保证的。
②inliers的阈值δ跟我们期望的模型抗噪能力相关,阈值越大,抗噪能力越弱,通常我们选取3个像素偏差的高斯模型作为噪声模型。
③ 重复1-3步骤的次数跟模型的outliers占比和我们所需要多高的置信度有关,可以用下面公式表示:
其中,S是所需最小试验的次数,P是置信度,p是inliers占的百分比数,k是随机采样的数目。
2、实际例子
这里用网友Micka的代码来举例:
#include <opencv2/opencv.hpp>
#include <ctime>
float verifyCircle(cv::Mat dt, cv::Point2f center, float radius, std::vector<cv::Point2f> & inlierSet)
{
unsigned int counter = 0;
unsigned int inlier = 0;
float minInlierDist = 2.0f;
float maxInlierDistMax = 100.0f;
float maxInlierDist = radius/25.0f;
if(maxInlierDist<minInlierDist) maxInlierDist = minInlierDist;
if(maxInlierDist>maxInlierDistMax) maxInlierDist = maxInlierDistMax;
// choose samples along the circle and count inlier percentage
for(float t =0; t<2*3.14159265359f; t+= 0.05f)
{
counter++;
float cX = radius*cos(t) + center.x;
float cY = radius*sin(t) + center.y;
if(cX < dt.cols)
if(cX >= 0)
if(cY < dt.rows)
if(cY >= 0)
if(dt.at<float>(cY,cX) < maxInlierDist)
{
inlier++;
inlierSet.push_back(cv::Point2f(cX,cY));
}
}
return (float)inlier/float(counter);
}
inline void getCircle(cv::Point2f& p1,cv::Point2f& p2,cv::Point2f& p3, cv::Point2f& center, float& radius)
{
float x1 = p1.x;
float x2 = p2.x;
float x3 = p3.x;
float y1 = p1.y;
float y2 = p2.y;
float y3 = p3.y;
// PLEASE CHECK FOR TYPOS IN THE FORMULA :)
center.x = (x1*x1+y1*y1)*(y2-y3) + (x2*x2+y2*y2)*(y3-y1) + (x3*x3+y3*y3)*(y1-y2);
center.x /= ( 2*(x1*(y2-y3) - y1*(x2-x3) + x2*y3 - x3*y2) );
center.y = (x1*x1 + y1*y1)*(x3-x2) + (x2*x2+y2*y2)*(x1-x3) + (x3*x3 + y3*y3)*(x2-x1);
center.y /= ( 2*(x1*(y2-y3) - y1*(x2-x3) + x2*y3 - x3*y2) );
radius = sqrt((center.x-x1)*(center.x-x1) + (center.y-y1)*(center.y-y1));
}
std::vector<cv::Point2f> getPointPositions(cv::Mat binaryImage)
{
std::vector<cv::Point2f> pointPositions;
for(unsigned int y=0; y<binaryImage.rows; ++y)
{
//unsigned char* rowPtr = binaryImage.ptr<unsigned char>(y);
for(unsigned int x=0; x<binaryImage.cols; ++x)
{
//if(rowPtr[x] > 0) pointPositions.push_back(cv::Point2i(x,y));
if(binaryImage.at<unsigned char>(y,x) > 0) pointPositions.push_back(cv::Point2f(x,y));
}
}
return pointPositions;
}
int main()
{
clock_t starttime, endtime;
starttime = clock();
cv::Mat color = cv::imread("1.jpg");
cv::Mat gray;
// convert to grayscale
// you could load as grayscale if you want, but I used it for (colored) output too
cv::cvtColor(color, gray, CV_BGR2GRAY);
cv::Mat mask;
float canny1 = 100;
float canny2 = 20;
cv::Mat canny;
cv::Canny(gray, canny, canny1,canny2);
//cv::imshow("canny",canny);
mask = canny;
std::vector<cv::Point2f> edgePositions;
edgePositions = getPointPositions(mask);
// create distance transform to efficiently evaluate distance to nearest edge
cv::Mat dt;
cv::distanceTransform(255-mask, dt,CV_DIST_L1, 3);
//TODO: maybe seed random variable for real random numbers.
unsigned int nIterations = 0;
cv::Point2f bestCircleCenter;
float bestCircleRadius;
float bestCirclePercentage = 0;
float minRadius = 10; // TODO: ADJUST THIS PARAMETER TO YOUR NEEDS, otherwise smaller circles wont be detected or "small noise circles" will have a high percentage of completion
//float minCirclePercentage = 0.2f;
float minCirclePercentage = 0.05f; // at least 5% of a circle must be present? maybe more...
int maxNrOfIterations = edgePositions.size(); // TODO: adjust this parameter or include some real ransac criteria with inlier/outlier percentages to decide when to stop
printf("%d\n", maxNrOfIterations);
for(unsigned int its=0; its< maxNrOfIterations; ++its)
{
//RANSAC: randomly choose 3 point and create a circle:
//TODO: choose randomly but more intelligent,
//so that it is more likely to choose three points of a circle.
//For example if there are many small circles, it is unlikely to randomly choose 3 points of the same circle.
unsigned int idx1 = rand()%edgePositions.size();
unsigned int idx2 = rand()%edgePositions.size();
unsigned int idx3 = rand()%edgePositions.size();
// we need 3 different samples:
if(idx1 == idx2) continue;
if(idx1 == idx3) continue;
if(idx3 == idx2) continue;
// create circle from 3 points:
cv::Point2f center; float radius;
getCircle(edgePositions[idx1],edgePositions[idx2],edgePositions[idx3],center,radius);
// inlier set unused at the moment but could be used to approximate a (more robust) circle from alle inlier
std::vector<cv::Point2f> inlierSet;
//verify or falsify the circle by inlier counting:
float cPerc = verifyCircle(dt,center,radius, inlierSet);
// update best circle information if necessary
if(cPerc >= bestCirclePercentage)
if(radius >= minRadius)
{
bestCirclePercentage = cPerc;
bestCircleRadius = radius;
bestCircleCenter = center;
}
}
std::cout << "bestCirclePerc: " << bestCirclePercentage << std::endl;
std::cout << "bestCircleRadius: " << bestCircleRadius << std::endl;
// draw if good circle was found
if(bestCirclePercentage >= minCirclePercentage)
if(bestCircleRadius >= minRadius);
cv::circle(color, bestCircleCenter,bestCircleRadius, cv::Scalar(255,255,0),1);
std::cout << "the used time is: "<<clock()-starttime <<std::endl;
cv::imshow("output",color);
cv::imshow("mask",mask);
//cv::imwrite("../outputData/1_circle_normalized.png", normalized);
cv::waitKey(0);
return 0;
}他的思路是:
1. 用Canny提取边缘点, 用distanceTransform得到距离边缘点的距离图;
2. 随机抽取三个不同的点解方程,三个方程三个未知数,有解;
3. 将2得到的圆周上的点与1中对应位置的点进行比较,看是否属于inliers,随后输出百分比;
4. 找出最大百分比对应的圆就是RANSAC得到的圆。
3、比较霍夫变换跟RANSAC:
鲁棒性来说,霍夫变换要稳定一点;
速度来说,霍夫变换要快,而且其所需时间变化不大,100ms左右能够完成;
RANSAC跟HoughTranform的参数调节都很麻烦,相对来说,霍夫变换更加简单一点;
RANSAC拟合的程度可能会更高,但受到outliers%<50%这个条件限制。
所以综合来说,HoughTransform的应用更广,效率更高,某些情况下,它不能很好地找到合理的圆,这时可以将RANSAC加进去进行优化,可能精度会高很多。
参考资料: RANSACKavita Bala