目录&索引
前言
由于博主视觉检测项目在视觉算法实现的基础上,需要 IMU 融合视觉作真值验证及方法拓展,用到 ROS gazebo 仿真,故在此记录 ubuntu 20.04 安装 ROS Noetic 详细过程。 花了一个下午,解决相关报错,完成安装。
附上官方 wikiros 安装链接,请注意,根据博主文档安装报错 ERROR,需先解决报错再执行下一步任务。当然,若在安装过程中有解决不了的难题,欢迎留言一起交流讨论。
操作系统: ubuntu 20.04
ROS 版本: Noetic
安装过程
1. 第三方软件源 sources.list.d
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
2. 软件包密钥 keys
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
3. 更新软件包
sudo apt update
4. 安装 ROS Noetic 完整版
sudo apt install ros-noetic-desktop-full
5. 环境配置
source /opt/ros/noetic/setup.bash
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
6. 测试 ROS 是否安装成功
打开终端输入
roscore,启动 master 节点打开第二个终端输入
rosrun turtlesim turtlesim_node出现小乌龟后,打开第三个终端输入
rosrun turtlesim turtle_teleop_key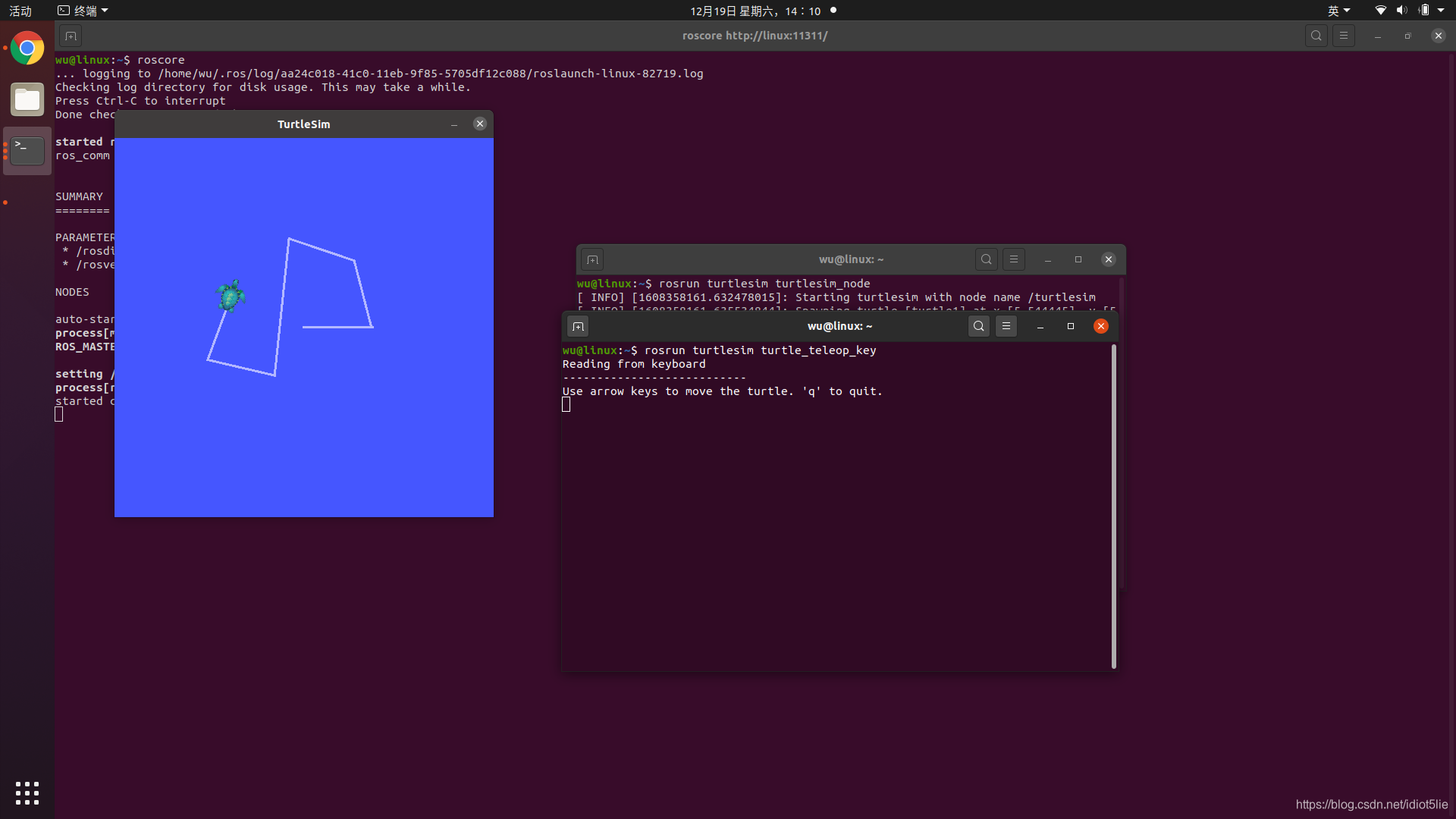
打开新的 termial,输入以下命令
rosrun rqt_graph rqt_graph,查看 ROS 节点信息
7. 安装 ROS 包依赖关系
如果小龟成功出现,表示已成功安装运行核心 ROS 包所需内容。
ROS 为创建和管理自己的工作区,它的工具、需求分开分发,比如通过 rosinstall 作为命令行工具,可下载其他的 ROS 工具包源代码。
sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
8. 安装 ROS 包 rosdep 工具
sudo apt install python3-rosdep
9. 初始化 rosdep
链接:【已解决】完美解决 ROS rosdep update 报错 timed out 超时问题
sudo rosdep init
rosdep update // timed out 报错点击链接解决
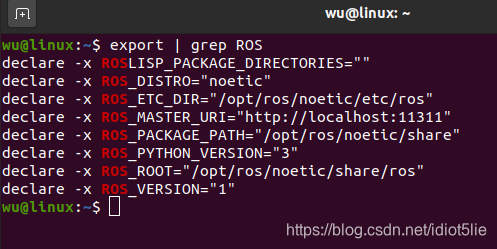
10. 查看安装效果
export | grep ROS
总结
截止到 2020 元旦,ubuntu 内核代码量已突破 2700 万行,不管是从接受度还是从社区维护角度,这已然是一个成熟的 linux 操作系统。对于 ubuntu terminal,包括软件安装、使用,任何相关报错 ERROR 或者警告 WARNING,都是关键的提示性语句。
在此基础上,希望自己培养一种主动查找与解决问题的能力,因为人生一样有大小不同的难题,一样的遇到,需要解决。