非线性系统的神经网络控制–理论
参考书籍:《matlab控制系统应用与实例》清华大学出版社 樊京、刘叔军、盖晓华、崔世林编辑。
第6章:神经网络相平面分区控制
6.1.2非线性系统的神经网络控制
目录
分类
神经网络在控制器设计中的应用一般分为两类:
一类神经控制:以神经网络为基础而形成的独立智能控制系统。
一类混合神经网络控制:利用神经网络学习和优化能力改善其他控制方法的控制。
常用的神经网络控制方式:
1、前馈+反馈复合控制
前馈控制:基于不变性原理的控制方法,可以显著提高系统的稳态精度和跟踪性能。
反馈控制:提高系统稳定性。
前馈传递函数和系统逆模型一致时,可实现理想控制。
但对于许多非线性系统而言,过程逆函数不可得,前馈控制器无法满足要求。人工神经网络可以充分逼近任意非线性函数,用其作为前馈控制器,对系统进行逆动态建模,满足不变性原理,实现跟踪控制。
2、神经内膜控制

只适用于开环稳定系统。
3、基于神经网络的预测控制

神经网络预测控制是利用作为对象辨识模型的神经网络产生预测信号,与系统的未来期望输出值之间存在误差,根据极小化性能指标,利用优化算法求出控制矢量,实现非线性系统的预测控制。
4、神经自适应控制

神经网络模型对对象进行辨识。神经网络控制器根据对象实际输出与理想输出(参考模型输出)差值E在线调整权值。
利用对象的输入输出数据进行离线学习,实际运行时,模型参数由神经网络在线计算得到,进而算出所需控制量。
5、基于神经网络的PID控制
利用神经网络在线整定PID参数,增加系统鲁棒性,实现高性能控制。
6、模糊神经网络控制
综合方式:
1.将神经网络作为模糊系统中的隶属度函数和模糊规则描述形式。
2.改变神经元的运算规则和映射函数,使神经元在功能表现上表现为各种模糊运算规则,形成模糊神经网络
7、神经鲁棒控制
H∞控制器需要对象的数学模型。利用神经网络建模,实现高精度控制。
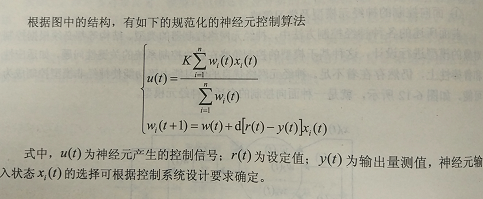
8、神经非模型控制
1.面向控制的神经元模型及学习策略
Hebb学习规则
2.神经非模型控制结构

demo(后期想起来放!!!)
版权声明:本文为answerMack原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。