前提条件:
- 安装好ROS系统
- 安装好realsense-ros库
备注:以下方法仅在PC主机上进行了测试,并且自带4个USB3.0接口。
方法1:通过serial_no字段,ROS自动去查找并发布主机上全部realsense相机。
方法2:通过serial_no字段,开发者通过指定相机serial_no编号,发布指定数量的realsense相机。
方法3:通过usb_port_id字段,ROS自动去查找并发布主机上全部realsense相机。
方法4:通过usb_port_id字段,开发者通过指定主机的usb_port_id端口号,发布指定数量的realsense相机。
1 通过serial_no开启4个相机方法
1.1 方法1——自动开启全部realsense相机
如果要使用roslaunch命令开启全部realsense相机,需要修改rs_multiple_devices.launch文件。
如果使用apt安装的realsense-ros,那么该文件路径在/opt/ros/melodic/share/realsense2_camera/launch/rs_multiple_devices.launch。
具体修改rs_multiple_devices.launch文件后的代码如下(如果realsense相机超过4个,新增字段即可开启更多相机):
<launch>
<arg name="serial_no_camera1" default=""/> <!-- Note: Replace with actual serial number -->
<arg name="serial_no_camera2" default=""/> <!-- Note: Replace with actual serial number -->
<arg name="serial_no_camera3" default=""/> <!-- Note: Replace with actual serial number -->
<arg name="serial_no_camera4" default=""/>
<arg name="camera1" default="camera1"/> <!-- Note: Replace with camera name -->
<arg name="camera2" default="camera2"/> <!-- Note: Replace with camera name -->
<arg name="camera3" default="camera3"/> <!-- Note: Replace with camera name -->
<arg name="camera4" default="camera4"/>
<arg name="tf_prefix_camera1" default="$(arg camera1)"/>
<arg name="tf_prefix_camera2" default="$(arg camera2)"/>
<arg name="tf_prefix_camera3" default="$(arg camera3)"/>
<arg name="tf_prefix_camera4" default="$(arg camera4)"/>
<arg name="initial_reset" default="false"/>
<group ns="$(arg camera1)">
<include file="$(find realsense2_camera)/launch/includes/nodelet.launch.xml">
<arg name="serial_no" value="$(arg serial_no_camera1)"/>
<arg name="tf_prefix" value="$(arg tf_prefix_camera1)"/>
<arg name="initial_reset" value="$(arg initial_reset)"/>
</include>
</group>
<group ns="$(arg camera2)">
<include file="$(find realsense2_camera)/launch/includes/nodelet.launch.xml">
<arg name="serial_no" value="$(arg serial_no_camera2)"/>
<arg name="tf_prefix" value="$(arg tf_prefix_camera2)"/>
<arg name="initial_reset" value="$(arg initial_reset)"/>
</include>
</group>
<group ns="$(arg camera3)">
<include file="$(find realsense2_camera)/launch/includes/nodelet.launch.xml">
<arg name="serial_no" value="$(arg serial_no_camera3)"/>
<arg name="tf_prefix" value="$(arg tf_prefix_camera3)"/>
<arg name="initial_reset" value="$(arg initial_reset)"/>
</include>
</group>
<group ns="$(arg camera4)" >
<include file="$(find realsense2_camera)/launch/includes/nodelet.launch.xml">
<arg name="serial_no" value="$(arg serial_no_camera4)"/>
<arg name="tf_prefix" value="$(arg tf_prefix_camera4)"/>
<arg name="initial_reset" value="$(arg initial_reset)"/>
</include>
</group>
</launch>
通过rs_multiple_devices启动全部相机的命令如下:(至于开启多少个相机,与rs_multiple_devices.launch中你定义了多少个serial_no_camera字段有关)
roslaunch realsense2_camera rs_multiple_devices.launch
1.2 方法2——自定义开启部分的realsense相机
如果你不想开启主机上所有realsense相机,并且想通过serial_no来指定要开启的相机,那么就修改rs_multiple_devices.launch文件(如果realsense相机超过4个,新增字段即可开启更多相机),如下:
<launch>
<arg name="serial_no_camera1" default=""/> <!-- Note: Replace with actual serial number -->
<arg name="serial_no_camera2" default=""/> <!-- Note: Replace with actual serial number -->
<arg name="serial_no_camera3" default=""/> <!-- Note: Replace with actual serial number -->
<arg name="serial_no_camera4" default=""/>
<arg name="camera1" default="camera1"/> <!-- Note: Replace with camera name -->
<arg name="camera2" default="camera2"/> <!-- Note: Replace with camera name -->
<arg name="camera3" default="camera3"/> <!-- Note: Replace with camera name -->
<arg name="camera4" default="camera4"/>
<arg name="tf_prefix_camera1" default="$(arg camera1)"/>
<arg name="tf_prefix_camera2" default="$(arg camera2)"/>
<arg name="tf_prefix_camera3" default="$(arg camera3)"/>
<arg name="tf_prefix_camera4" default="$(arg camera4)"/>
<arg name="initial_reset" default="false"/>
<group ns="$(arg camera1)" if="$(eval serial_no_camera1 != '')">
<include file="$(find realsense2_camera)/launch/includes/nodelet.launch.xml">
<arg name="serial_no" value="$(arg serial_no_camera1)"/>
<arg name="tf_prefix" value="$(arg tf_prefix_camera1)"/>
<arg name="initial_reset" value="$(arg initial_reset)"/>
</include>
</group>
<group ns="$(arg camera2)" if="$(eval serial_no_camera2 != '')">
<include file="$(find realsense2_camera)/launch/includes/nodelet.launch.xml">
<arg name="serial_no" value="$(arg serial_no_camera2)"/>
<arg name="tf_prefix" value="$(arg tf_prefix_camera2)"/>
<arg name="initial_reset" value="$(arg initial_reset)"/>
</include>
</group>
<group ns="$(arg camera3)" if="$(eval serial_no_camera3 != '')">
<include file="$(find realsense2_camera)/launch/includes/nodelet.launch.xml">
<arg name="serial_no" value="$(arg serial_no_camera3)"/>
<arg name="tf_prefix" value="$(arg tf_prefix_camera3)"/>
<arg name="initial_reset" value="$(arg initial_reset)"/>
</include>
</group>
<group ns="$(arg camera4)" if="$(eval serial_no_camera4 != '')">
<include file="$(find realsense2_camera)/launch/includes/nodelet.launch.xml">
<arg name="serial_no" value="$(arg serial_no_camera4)"/>
<arg name="tf_prefix" value="$(arg tf_prefix_camera4)"/>
<arg name="initial_reset" value="$(arg initial_reset)"/>
</include>
</group>
</launch>
通过rs_multiple_devices启动指定的一批相机的命令如下:(camera编号换成自己相机编号)
roslaunch realsense2_camera rs_multiple_devices.launch serial_no_camera1:=823112060538 serial_no_camera2:=821312062713 。。。
备注:
- 查看当前主机插入的realsense相机编号的命令:rs-enumerate-devices | grep Serial
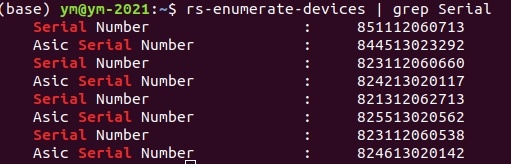
如上图,主机上插了4个realsense相机,使用Serial Number后面的编号。
2 通过usb_port_id开启4个相机方法
该方法原理是ROS自动在指定的主机USB端口号上找realsense相机。
具体方法:修改rs_multiple_devices.launch文件(也可以自己创建一个.launch文件),内容变成如下:
<launch>
<arg name="usb_port_id1" default="2-5"/>
<arg name="usb_port_id2" default="2-6"/>
<arg name="usb_port_id3" default="2-7"/>
<arg name="usb_port_id4" default="2-8"/>
<arg name="camera1" default="camera1"/> <!-- Note: Replace with camera name -->
<arg name="camera2" default="camera2"/> <!-- Note: Replace with camera name -->
<arg name="camera3" default="camera3"/> <!-- Note: Replace with camera name -->
<arg name="camera4" default="camera4"/>
<arg name="tf_prefix_camera1" default="$(arg camera1)"/>
<arg name="tf_prefix_camera2" default="$(arg camera2)"/>
<arg name="tf_prefix_camera3" default="$(arg camera3)"/>
<arg name="tf_prefix_camera4" default="$(arg camera4)"/>
<arg name="initial_reset" default="false"/>
<group ns="$(arg camera1)">
<include file="$(find realsense2_camera)/launch/includes/nodelet.launch.xml">
<arg name="usb_port_id" value="$(arg usb_port_id1)"/>
<arg name="tf_prefix" value="$(arg tf_prefix_camera1)"/>
<arg name="initial_reset" value="$(arg initial_reset)"/>
</include>
</group>
<group ns="$(arg camera2)">
<include file="$(find realsense2_camera)/launch/includes/nodelet.launch.xml">
<arg name="usb_port_id" value="$(arg usb_port_id2)"/>
<arg name="tf_prefix" value="$(arg tf_prefix_camera2)"/>
<arg name="initial_reset" value="$(arg initial_reset)"/>
</include>
</group>
<group ns="$(arg camera3)">
<include file="$(find realsense2_camera)/launch/includes/nodelet.launch.xml">
<arg name="usb_port_id" value="$(arg usb_port_id3)"/>
<arg name="tf_prefix" value="$(arg tf_prefix_camera3)"/>
<arg name="initial_reset" value="$(arg initial_reset)"/>
</include>
</group>
<group ns="$(arg camera4)">
<include file="$(find realsense2_camera)/launch/includes/nodelet.launch.xml">
<arg name="usb_port_id" value="$(arg usb_port_id4)"/>
<arg name="tf_prefix" value="$(arg tf_prefix_camera4)"/>
<arg name="initial_reset" value="$(arg initial_reset)"/>
</include>
</group>
</launch>
备注:
- 上述4个默认default端口号,是测试时4个realsense相机插在主机上的USB端口号。具体使用时,要明确realsense所插主机的USB端口号。查找realsense所插USB端口号方法见realsense-ros官网。
- 也可以删掉default默认端口号,那执行rs_multiple_devices.launch时ROS会自动在4个主机USB端口上找realsense相机,找到几个就会发布几个相机。这就有个问题,如果rs_multiple_devices.launch中只定义了4个usb_port_id字段,那么它只会在4个USB端口上找,如果主机上有4个以上USB端口,那么该rs_multiple_devices.launch可能无法全部自动的找到所有realsense相机,解决办法就是往rs_multiple_devices.launch中新增usb_port_id字段,使字段数量超过主机USB端口数量,那么该命令就能全部查到所有realsense相机。
- 如果只想打开固定USB端口上的realsense相机,参考本文“方法1”,删除launch文件中default默认端口号,并在某些位置加上形如: if="$(eval usb_port_id1 != '')"