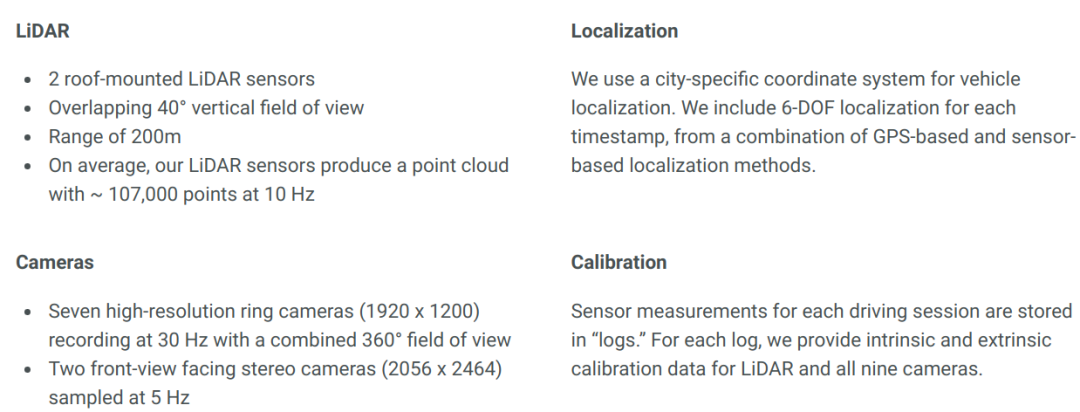
Argoverse数据集是由Argo AI、卡内基梅隆大学、佐治亚理工学院发布的用于支持自动驾驶汽车3D Tracking和Motion Forecasting研究的数据集。数据集包括两个部分:Argoverse 3D Tracking与Argoverse Motion Forecasting。
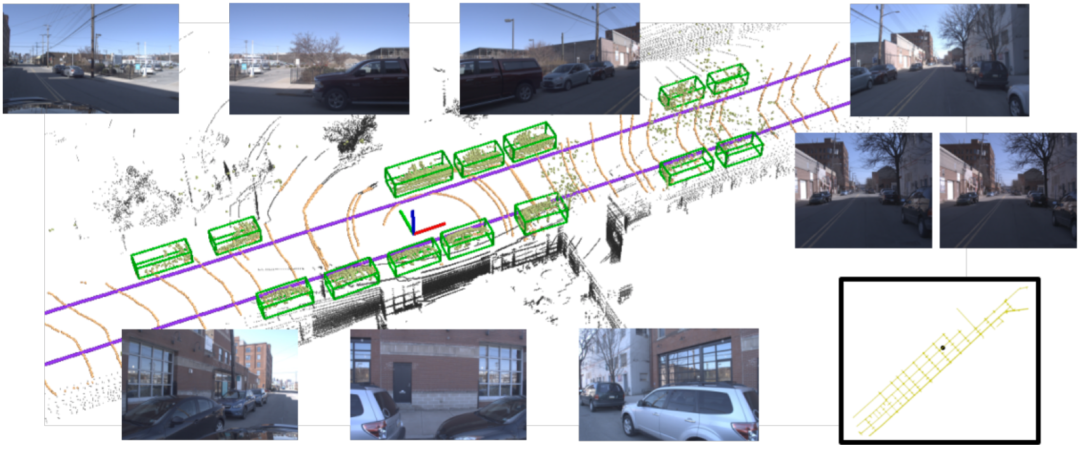
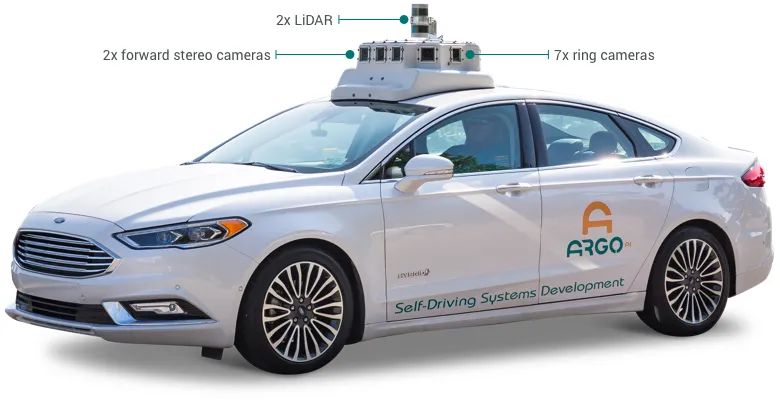
Argoverse数据集包含LiDAR数据、 RGB视频数据、前向双目数据、6 DOF的定位数据以及高精地图的数据,所有的数据都跟高精地图数据进行过配准。
Argoverse是第一个包含高精地图的数据集,它包含了290KM的带有几何形状和语义信息的高精地图数据。
数据收集
Argoverse高精地图
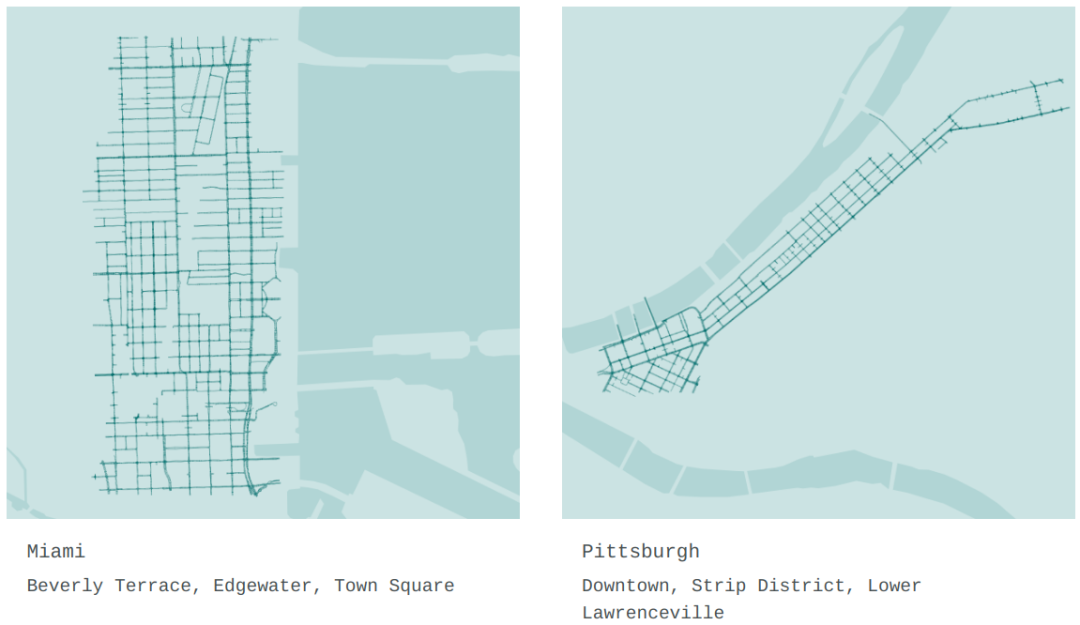
| 城市 | 覆盖范围 | 路网长度 |
|---|---|---|
| Miami | 788510 | 204KM |
| Pittsburgh | 286104 | 86KM |
Argoverse高精地图坐标系采用UTM坐标系,UTM将全球分成60个Zone,每个Zone经度方向跨越6度,在UTM基础之上,Argoverse又将坐标系相对于单个城市的固定坐标进行偏移,从而得到最终数据集的地图坐标系。
Argoverse地图包含三个部分:
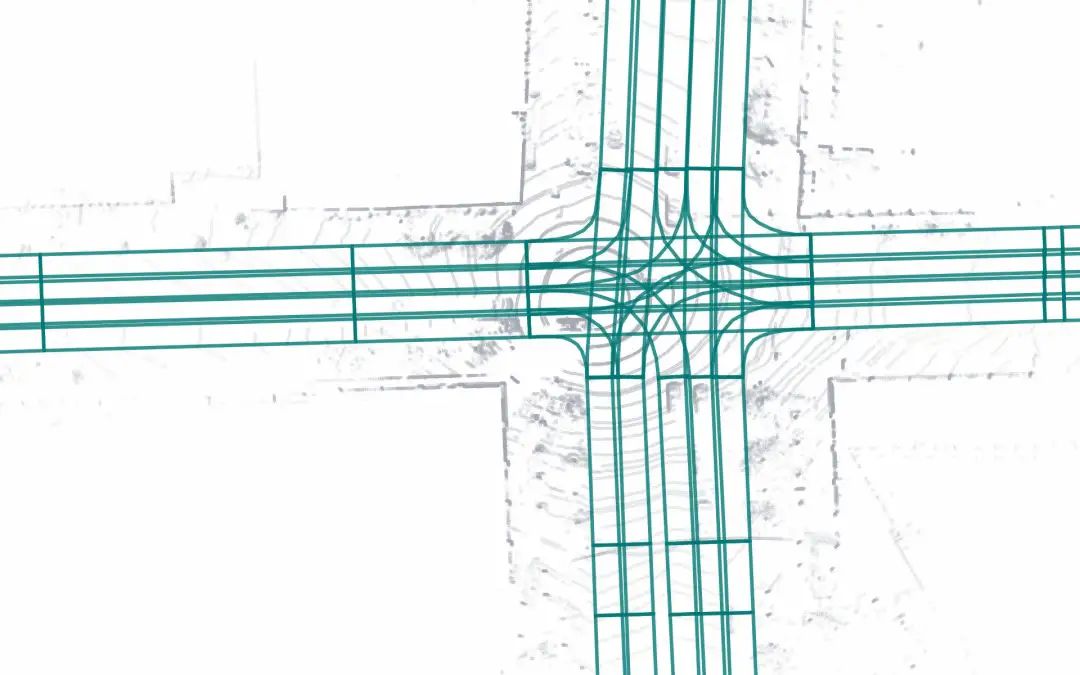
1) Vector Map of lane centerlines and their attributes
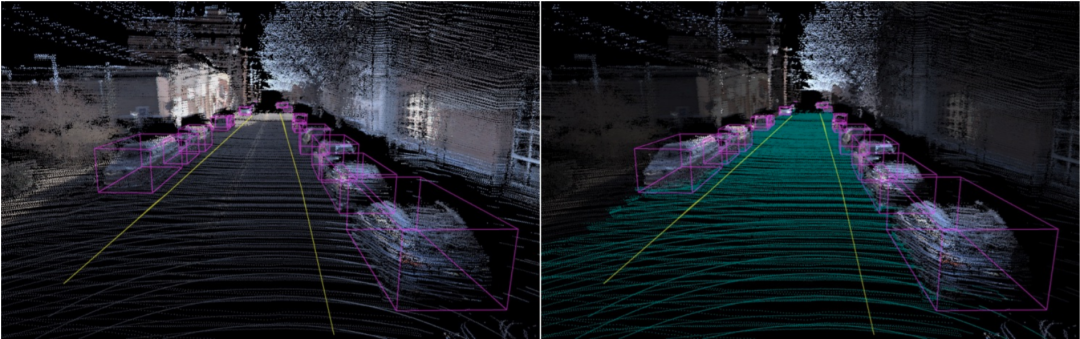
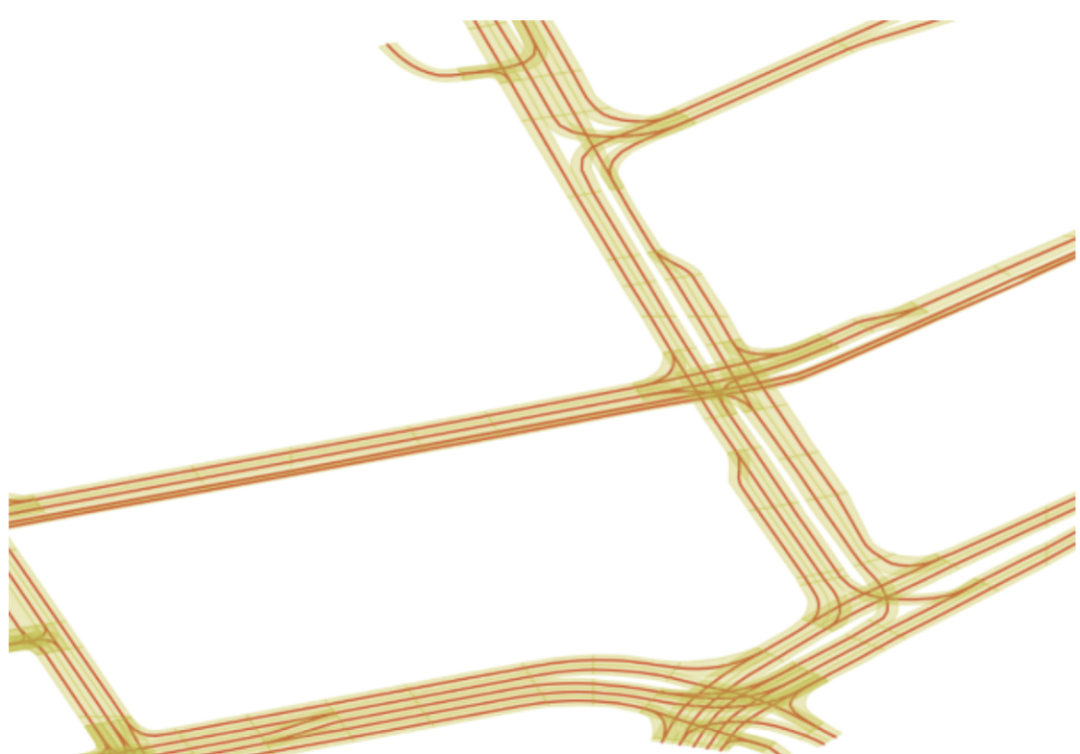
2)Rasterized Map of Ground Height
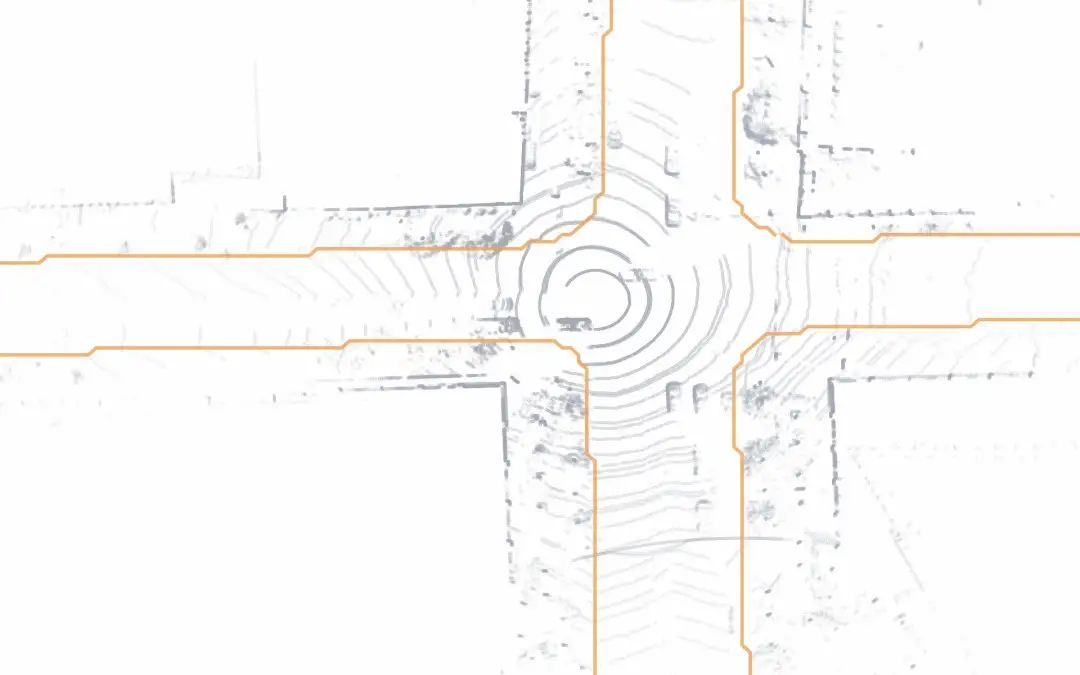
3)Rasterized Map of driveable area and region of interest (ROI)

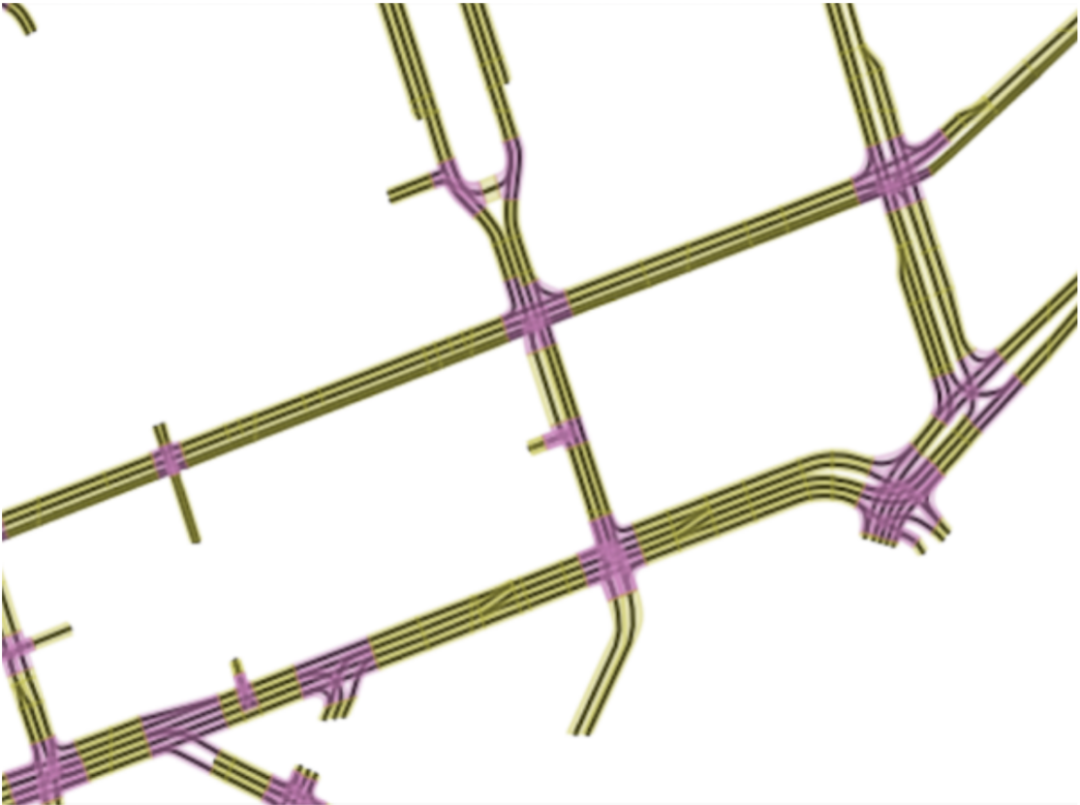
高精地图的数据可视化效果如下:
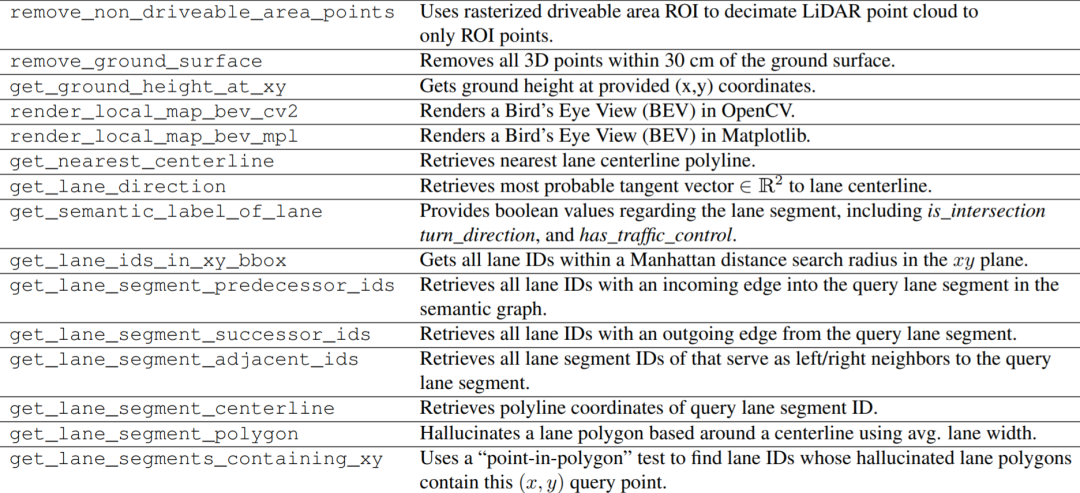
Argoverse Map的矢量数据(Vector Map)采用扩展的OpenStreetMap(OSM)格式,并提供了Python API用于获取地图数据。
Argoverse Map API
3D Tracking
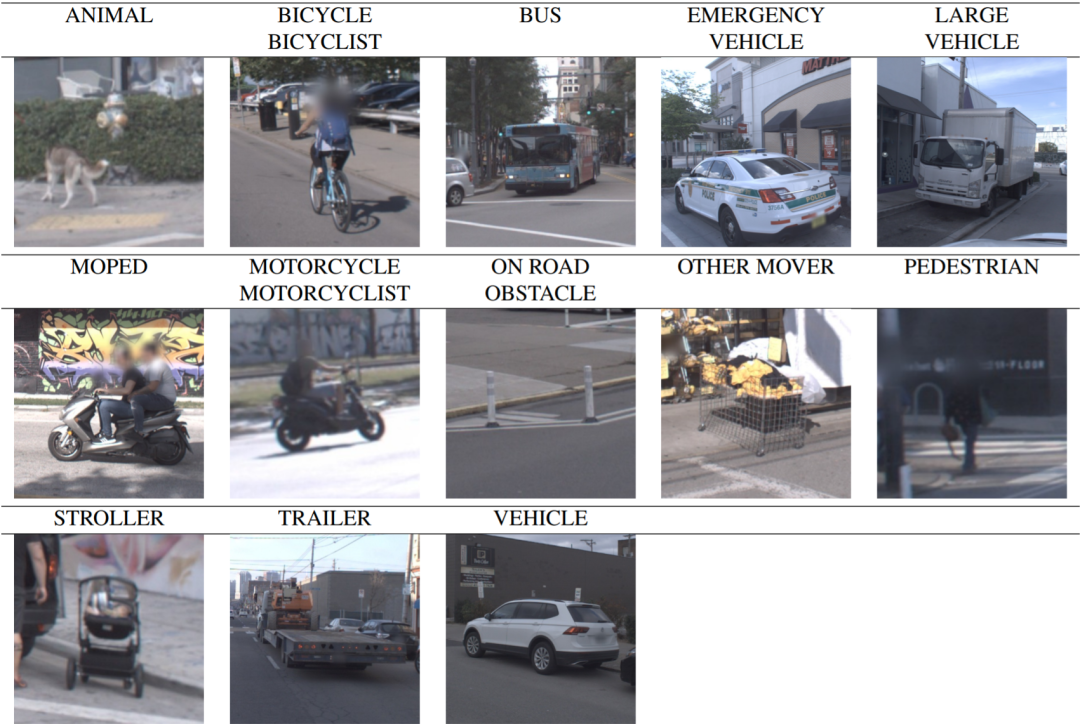
Argoverse数据的3D Tracking包含如下分类:
Argoverse Tracker从点云数据(LIDAR Data)中跟踪周围车辆的位置和速度,Tracker的工作流程如下:
Segmentation and Detection
分割检测的过程充分利用了Camera和Lidar各自的特性,首先利用DBSCAN根据点云密度对3D Lidar点云数据进行聚类,然后利用Mask RCNN获取像素空间上的Object Mask,最后对比点云聚类和Mask的结果,丢弃掉图像投影不落在任意一个Mask中的Lidar Cluster。
Association
通过Hungarian Algorithm(匈牙利算法)全局优化关联前后两帧检测的Objects。
Tracking
使用ICP(Iterative Closest Point)来估计相同Object在不同帧的相对变换,然后使用Kalman Filter(ICP的结果作为Measurement)来估计车辆的6自由度姿态和速度。
运动轨迹预测
运动预测(Motion Forecasting)的baseline包含了三类坐标系:
1)City Coordinate System。就是前面提到的地图坐标系。
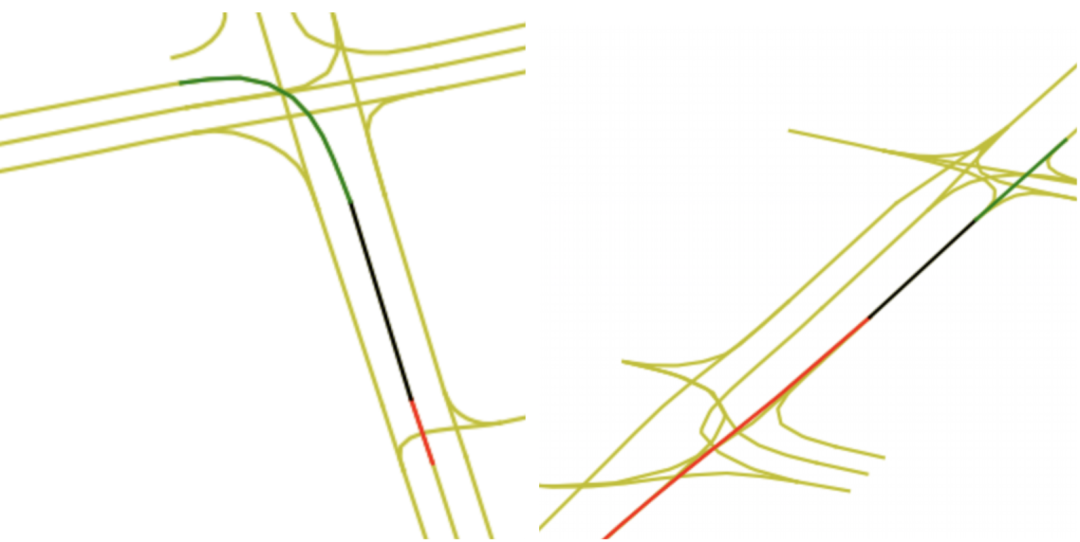
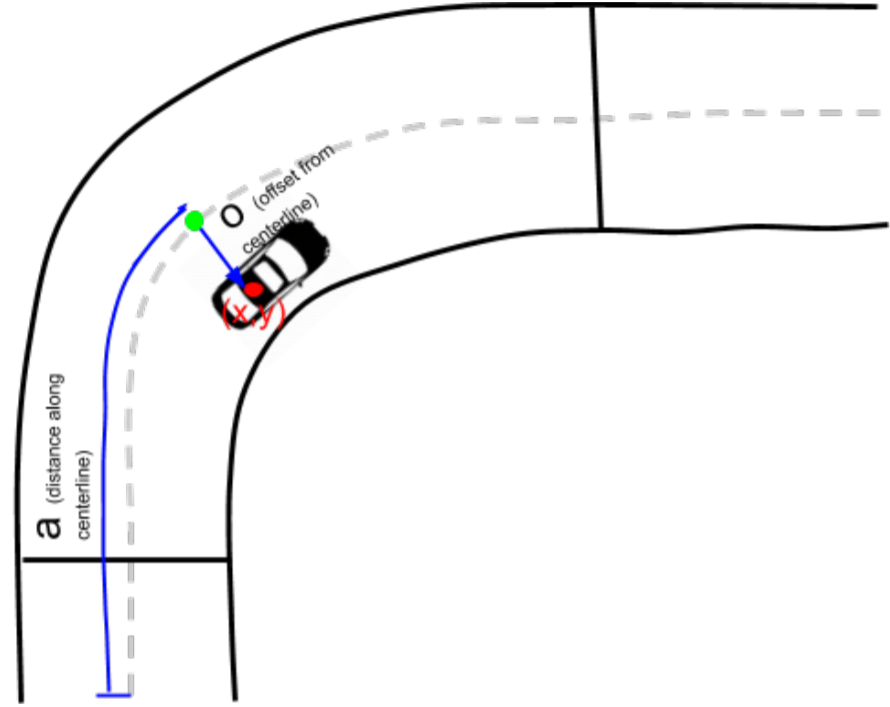
2)2D curvilinear coordinate system。
如下图所示,将绝对坐标系转换为沿着曲线方向的纵向距离和偏离曲线的横向距离。
3)Trajectory Normalization
在不使用Map的情况下,对Trajectory做归一化处理,所有Observation的起始位置位于(0,0),结束位置位于x轴上。事实证明,Normalization的效果比Absolute Map Coordinates或者Absolute Orientations的效果好。
Feature提取
Baseline使用距离Agent前后Object的distance来捕获Social Context,使用2D curvilinear coordinate system来捕获Map context。
Baseline模型
基于Social Feature和Map Feature,Argovese提供了一系列的Baseline模型:Constant Velocity, Nearest Neighbor和LSTM Encoder-Decoder模型等。
Prediction Metric
minADE = minimum Average Displacement Error,对于多轨迹线预测,minADE是FDE最小的轨迹的ADE。
minFDE = minimum Final Displacement Error。
minFDE只能评估最好的估计有多好,但不能评估所有轨迹的优劣。为了解决这个问题,论文中提出了新的Metric:Drivable Area Compliance (DAC),假设Model生成了n条未来可能的轨迹,其中m条轨迹超出了Drivable Area的范围,那么DAC = (n - m) / n, DAC的值越大意味着预测的效果越好。
另外论文中也使用了Miss Rate (MR)的Metric,如果有n条轨迹,其中m条轨迹的最后的坐标距离Ground Truth超过2m,那么miss rate=m/n。

参考材料
1.https://arxiv.org/pdf/1911.02620.pdf
2.https://www.argoverse.org/data.html#maps-link
