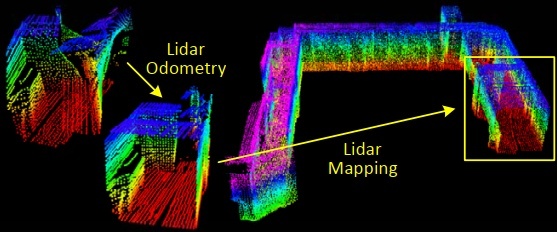
本章记录loam的第三部分地图构建,仍然从main函数看起。
首先订阅/laser_cloud_corner_last和/laser_cloud_surf_last特征点云,订阅特征点云对应的全局位姿/laser_odom_to_init。然后订阅第二部分laserOdometry处理后的实时点云/velodyne_cloud_3,订阅/imu/data用于读取imu姿态角。最后发布/laser_cloud_surround和/velodyne_cloud_registered和/aft_mapped_to_init。
点云回调函数将点云rosmsgs格式转换为pcl格式,全局位姿回调将位姿信息保存在transformSum中,imu回调函数保存时间戳和roll/pitch信息。
建图环节将整个空间三维区域划分为laserCloudNum个子cube,从while循环开始看。
while (status) {
ros::spinOnce();
if (newLaserCloudCornerLast && newLaserCloudSurfLast && newLaserCloudFullRes && newLaserOdometry &&
fabs(timeLaserCloudCornerLast - timeLaserOdometry) < 0.005 &&
fabs(timeLaserCloudSurfLast - timeLaserOdometry) < 0.005 &&
fabs(timeLaserCloudFullRes - timeLaserOdometry) < 0.005) {
newLaserCloudCornerLast = false;
newLaserCloudSurfLast = false;
newLaserCloudFullRes = false;
newLaserOdometry = false;
frameCount++; while循环首先进行一次回调,并确保时间一致性,然后重置标志位,帧数量+1。
后续涉及到transformAssociateToMap()函数,先分析。该函数首先将每次地图匹配前的位姿transformBefMapped与订阅的初始位姿transformSum之间的平移偏差按照yxz顺序旋转到transformSum坐标系方向,得到transformIncre。然后和第二部分PluginIMURotation()函数一样,通过地图匹配前后的姿态transformBefMapped/transformAftMapped以及初始姿态transformSum计算得到地图匹配时transformTobeMapped的姿态。计算原理如下图。
最后将transformIncre位置偏差转换至transformTobeMapped坐标系方向,由transformAftMapped位置信息减去转换后的偏差得到transformTobeMapped位置信息。
下面回到main函数中:
/*坐标变换*/
if (frameCount >= stackFrameNum) {
transformAssociateToMap(); //地图匹配坐标转换
int laserCloudCornerLastNum = laserCloudCornerLast->points.size();
for (int i = 0; i < laserCloudCornerLastNum; i++) {
pointAssociateToMap(&laserCloudCornerLast->points[i], &pointSel);
laserCloudCornerStack2->push_back(pointSel);
}
int laserCloudSurfLastNum = laserCloudSurfLast->points.size(); //面特征点
for (int i = 0; i < laserCloudSurfLastNum; i++) {
pointAssociateToMap(&laserCloudSurfLast->points[i], &pointSel);
laserCloudSurfStack2->push_back(pointSel);
}
}上述代码首先调用transformAssociateToMap()函数进行地图匹配相关位姿信息变换,接着针对边特征点和面特征点调用pointAssociateToMap()函数,将pi坐标点通过transformTobeMapped转换到全局坐标系,将处理完的特征点保存到点云。
/*优化处理 找当前估计的lidar位姿属于哪个cube,I/J/K对应cube的索引*/
if (frameCount >= stackFrameNum) {
frameCount = 0;
//当前lidar坐标系{L}y轴一点(0,10,0)
PointType pointOnYAxis;
pointOnYAxis.x = 0.0;
pointOnYAxis.y = 10.0;
pointOnYAxis.z = 0.0;
pointAssociateToMap(&pointOnYAxis, &pointOnYAxis); //转换到全局坐标系
//cube中心位置索引
int centerCubeI = int((transformTobeMapped[3] + 25.0) / 50.0) + laserCloudCenWidth; //[-25,25)->10 [25,75)->11
int centerCubeJ = int((transformTobeMapped[4] + 25.0) / 50.0) + laserCloudCenHeight; //[-25,25)->5 [25,75)->6
int centerCubeK = int((transformTobeMapped[5] + 25.0) / 50.0) + laserCloudCenDepth; //[-25,25)->10 [25,75)->11
if (transformTobeMapped[3] + 25.0 < 0) centerCubeI--;
if (transformTobeMapped[4] + 25.0 < 0) centerCubeJ--;
if (transformTobeMapped[5] + 25.0 < 0) centerCubeK--; 上述代码首先在当前帧坐标系中定义一个坐标点pointOnYxis,并转换到全局坐标系。接着计算当前帧位姿所在的cube索引,如果是在负区间则索引需要减1。
//如果当前帧lidar位姿对应的cube在整个大cube边缘则将索引向中心方向挪动一个单位
while (centerCubeI < 3) { //width方向的小端 将帧cube指针向中心方向平移
for (int j = 0; j < laserCloudHeight; j++) {
for (int k = 0; k < laserCloudDepth; k++) {
int i = laserCloudWidth - 1;
pcl::PointCloud<PointType>::Ptr laserCloudCubeCornerPointer = //指向width最大处的cube点云
laserCloudCornerArray[i + laserCloudWidth * j + laserCloudWidth * laserCloudHeight * k];
pcl::PointCloud<PointType>::Ptr laserCloudCubeSurfPointer =
laserCloudSurfArray[i + laserCloudWidth * j + laserCloudWidth * laserCloudHeight * k];
for (; i >= 1; i--) { //将cube由width大段开始依次向增大方向移动一个单位
laserCloudCornerArray[i + laserCloudWidth * j + laserCloudWidth * laserCloudHeight * k] =
laserCloudCornerArray[i - 1 + laserCloudWidth*j + laserCloudWidth * laserCloudHeight * k];
laserCloudSurfArray[i + laserCloudWidth * j + laserCloudWidth * laserCloudHeight * k] =
laserCloudSurfArray[i - 1 + laserCloudWidth * j + laserCloudWidth * laserCloudHeight * k];
}
//移动后最小width索引指向原来最大width处
laserCloudCornerArray[i + laserCloudWidth * j + laserCloudWidth * laserCloudHeight * k] =
laserCloudCubeCornerPointer;
laserCloudSurfArray[i + laserCloudWidth * j + laserCloudWidth * laserCloudHeight * k] =
laserCloudCubeSurfPointer;
laserCloudCubeCornerPointer->clear();
laserCloudCubeSurfPointer->clear();
}
}
centerCubeI++; //帧所在的cube在width方向相应增大一个单位
laserCloudCenWidth++; //中心位置索引同样增大
}得到当前帧cube索引后需要分析判断,上段代码对cube进行width方向判断。如果当前帧cube索引位于width小端边界(<3),则从大端-1开始依次向大端平移一个单位,其中最大端的索引赋给移动前的最小端,全部索引移动完后对应的当前帧索引centerCubeI和中心索引laserCloudCenWidth都需要+1。上述代码针对的是width小端,同样的,width大端/height小端和大端/depth小端和大端需要进行类似判断。最终,得到当前帧全局位姿在cube中经过处理的索引。
//在当前帧lidar位姿所在cube附近5×5×5的邻域cube内找有效的cube
int laserCloudValidNum = 0; //125个领域cube中有效领域的num
int laserCloudSurroundNum = 0;
for (int i = centerCubeI - 2; i <= centerCubeI + 2; i++) {// centerCube为当前帧所在cube的索引
for (int j = centerCubeJ - 2; j <= centerCubeJ + 2; j++) {
for (int k = centerCubeK - 2; k <= centerCubeK + 2; k++) {
if (i >= 0 && i < laserCloudWidth && //在cube索引范围内
j >= 0 && j < laserCloudHeight &&
k >= 0 && k < laserCloudDepth) {
//计算各邻域cube中心点坐标
float centerX = 50.0 * (i - laserCloudCenWidth);
float centerY = 50.0 * (j - laserCloudCenHeight);
float centerZ = 50.0 * (k - laserCloudCenDepth);
//取cube的8个顶点
bool isInLaserFOV = false;
for (int ii = -1; ii <= 1; ii += 2) { //2X2X2=8
for (int jj = -1; jj <= 1; jj += 2) {
for (int kk = -1; kk <= 1; kk += 2) {
float cornerX = centerX + 25.0 * ii; //cube的8个顶点坐标
float cornerY = centerY + 25.0 * jj;
float cornerZ = centerZ + 25.0 * kk;
float squaredSide1 = (transformTobeMapped[3] - cornerX)//当前帧lidar全局位姿与邻域cube顶点的距离平方
* (transformTobeMapped[3] - cornerX)
+ (transformTobeMapped[4] - cornerY)
* (transformTobeMapped[4] - cornerY)
+ (transformTobeMapped[5] - cornerZ)
* (transformTobeMapped[5] - cornerZ);
float squaredSide2 = (pointOnYAxis.x - cornerX) * (pointOnYAxis.x - cornerX) //当前帧中(0,10,0)与顶点距离方
+ (pointOnYAxis.y - cornerY) * (pointOnYAxis.y - cornerY)
+ (pointOnYAxis.z - cornerZ) * (pointOnYAxis.z - cornerZ);
float check1 = 100.0 + squaredSide1 - squaredSide2
- 10.0 * sqrt(3.0) * sqrt(squaredSide1);
float check2 = 100.0 + squaredSide1 - squaredSide2
+ 10.0 * sqrt(3.0) * sqrt(squaredSide1);
if (check1 < 0 && check2 > 0) { //该cube的8个顶点只要有一个符合距离相关的条件,则该cube为有效邻域
isInLaserFOV = true;
}
}
}
}
if (isInLaserFOV) { //当前lidar全局位姿的有效邻域cube在地图中的索引
laserCloudValidInd[laserCloudValidNum] = i + laserCloudWidth * j
+ laserCloudWidth * laserCloudHeight * k;
laserCloudValidNum++;
}
// 125个领域cube索引(包括不符合距离条件的cube)
laserCloudSurroundInd[laserCloudSurroundNum] = i + laserCloudWidth * j
+ laserCloudWidth * laserCloudHeight * k;
laserCloudSurroundNum++;
}
}
}
}地图匹配是与当前帧位姿附近5*5*5个cube匹配,需要对这125个邻域cube分析。上述代码中首先计算子cube中心坐标,根据中心坐标计算其8个顶点,进而计算当前帧lidar全局坐标与邻域cube顶点的距离方squaredSide1以及前面定义的pointOnYxis与顶点的距离方。通过check1和check2判断当前邻域cube是否有效,此处判断条件设定不是很理解?如果满足判定条件,则当前cube为lidar全局位姿的有效邻域,保存对应的cube索引到laserCloudValidInd[],同时保存所有的125个邻域索引到laserCloudSurroundInd[]。
//拼接有效领域cube内的特征点云作为map点云用来匹配
laserCloudCornerFromMap->clear();
laserCloudSurfFromMap->clear();
for (int i = 0; i < laserCloudValidNum; i++) { //有效的邻域cube
*laserCloudCornerFromMap += *laserCloudCornerArray[laserCloudValidInd[i]]; //有效cube构成匹配地图
*laserCloudSurfFromMap += *laserCloudSurfArray[laserCloudValidInd[i]];
}
int laserCloudCornerFromMapNum = laserCloudCornerFromMap->points.size(); //corner点云中特征点数量
int laserCloudSurfFromMapNum = laserCloudSurfFromMap->points.size(); //surf点云特征点数量
//将世界坐标系下当前帧特征点转到当前lidar坐标系下
int laserCloudCornerStackNum2 = laserCloudCornerStack2->points.size(); //当前帧边特征点个数
for (int i = 0; i < laserCloudCornerStackNum2; i++) {
pointAssociateTobeMapped(&laserCloudCornerStack2->points[i], &laserCloudCornerStack2->points[i]);
}
int laserCloudSurfStackNum2 = laserCloudSurfStack2->points.size(); //面特征点
for (int i = 0; i < laserCloudSurfStackNum2; i++) {
pointAssociateTobeMapped(&laserCloudSurfStack2->points[i], &laserCloudSurfStack2->points[i]);
}上述代码首先将有效邻域cube点云拼接到laserCloudCornerFromMap和laserCloudCornerSurfFromMap,接着调用pointAssociateTobeMapped()函数将世界坐标系下的特征点云转换到lidar坐标系,此处世界坐标系点云来自于之前pointAssociateToMap()函数,但中间并没有对特征点云做别的操作,来回转换是否多余?
接着对lidar坐标系下特征点云进行了滤波处理,降低数据量。
至此,得到了lidar当前帧特征点云和附近的地图特征点云,后续利用kD树寻找邻近匹配点,从而构建点到线和点到面距离,这部分与前一章类似。差异在于,对于线特征点,帧间匹配时kd树是先查找当前帧特征点在前一帧的最邻近点,再在相邻线找次邻近点,从而构建点到直线距离;而地图匹配时是查找当前帧特征点的5个邻近点,再根据5个领近点的特征向量构建直线距离。
if (laserCloudCornerFromMapNum > 10 && laserCloudSurfFromMapNum > 100) { //地图特征点足够多
kdtreeCornerFromMap->setInputCloud(laserCloudCornerFromMap);//地图特征点云存入kd树
kdtreeSurfFromMap->setInputCloud(laserCloudSurfFromMap);
for (int iterCount = 0; iterCount < 10; iterCount++) { //迭代次数
laserCloudOri->clear();
coeffSel->clear();
//当前帧边特征点 地图KD树搜索当前帧边特征点最邻近的5个点
for (int i = 0; i < laserCloudCornerStackNum; i++) {
pointOri = laserCloudCornerStack->points[i];
pointAssociateToMap(&pointOri, &pointSel); //特征点转到全局坐标系下
kdtreeCornerFromMap->nearestKSearch(pointSel, 5, pointSearchInd, pointSearchSqDis);
if (pointSearchSqDis[4] < 1.0) { //第5远的点与当前特征点的距离在阈值内
float cx = 0;
float cy = 0;
float cz = 0;
for (int j = 0; j < 5; j++) {
cx += laserCloudCornerFromMap->points[pointSearchInd[j]].x;
cy += laserCloudCornerFromMap->points[pointSearchInd[j]].y;
cz += laserCloudCornerFromMap->points[pointSearchInd[j]].z;
}
cx /= 5; //求出5个邻近点坐标均值
cy /= 5;
cz /= 5;
float a11 = 0;
float a12 = 0;
float a13 = 0;
float a22 = 0;
float a23 = 0;
float a33 = 0;
for (int j = 0; j < 5; j++) { //构建协方差矩阵
float ax = laserCloudCornerFromMap->points[pointSearchInd[j]].x - cx;
float ay = laserCloudCornerFromMap->points[pointSearchInd[j]].y - cy;
float az = laserCloudCornerFromMap->points[pointSearchInd[j]].z - cz;
a11 += ax * ax;
a12 += ax * ay;
a13 += ax * az;
a22 += ay * ay;
a23 += ay * az;
a33 += az * az;
}
a11 /= 5;
a12 /= 5;
a13 /= 5;
a22 /= 5;
a23 /= 5;
a33 /= 5;
matA1.at<float>(0, 0) = a11; //3X3协方差矩阵
matA1.at<float>(0, 1) = a12;
matA1.at<float>(0, 2) = a13;
matA1.at<float>(1, 0) = a12;
matA1.at<float>(1, 1) = a22;
matA1.at<float>(1, 2) = a23;
matA1.at<float>(2, 0) = a13;
matA1.at<float>(2, 1) = a23;
matA1.at<float>(2, 2) = a33;
cv::eigen(matA1, matD1, matV1); //特征根matD1,对应的特征向量matV1
if (matD1.at<float>(0, 0) > 3 * matD1.at<float>(0, 1)) {
float x0 = pointSel.x; //x0为当前帧特征点
float y0 = pointSel.y;
float z0 = pointSel.z;
//根据特征向量的方向构建x1和x2,两者连线代表最近点构成的直线
float x1 = cx + 0.1 * matV1.at<float>(0, 0);
float y1 = cy + 0.1 * matV1.at<float>(0, 1);
float z1 = cz + 0.1 * matV1.at<float>(0, 2);
float x2 = cx - 0.1 * matV1.at<float>(0, 0);
float y2 = cy - 0.1 * matV1.at<float>(0, 1);
float z2 = cz - 0.1 * matV1.at<float>(0, 2);上述代码首先将特征地图存入kd树,设置迭代循环。对于边特征点,先转到全局坐标系,再在KD树中搜索5个邻近点。接着求5个邻域点的均值点,并构建协方差矩阵,进行特征值分解,通过最大特征值对应的特征向量构建直线,最终得到与前一章帧间匹配类似的当前特征帧特征点x0,匹配的直线点x1/x2。后续构建点到直线的距离ld2及求偏导la/lb/lc与前一章帧间匹配完全一致。
对于面特征点,上一章帧间匹配通过kd树查找3个最邻近点构成平面,然后通过论文中公式计算点到面的距离。本章地图匹配则仍然是先搜索5个最近点,由于这5个点在一个平面上,代码中直接通过矩阵运算求解5个点构成平面的法向量。
得到当前帧线特征点和面特征点与地图配准后,构建loss函数求解,构建损失函数原理如下:

for (int i = 0; i < laserCloudSelNum; i++) {
pointOri = laserCloudOri->points[i]; //当前帧特征点
coeff = coeffSel->points[i]; //对应距离的偏导
//loss函数对欧拉角求偏导
//pian(loss)/pian(ex)
float arx = (crx*sry*srz*pointOri.x + crx*crz*sry*pointOri.y - srx*sry*pointOri.z) * coeff.x
+ (-srx*srz*pointOri.x - crz*srx*pointOri.y - crx*pointOri.z) * coeff.y
+ (crx*cry*srz*pointOri.x + crx*cry*crz*pointOri.y - cry*srx*pointOri.z) * coeff.z;
float ary = ((cry*srx*srz - crz*sry)*pointOri.x
+ (sry*srz + cry*crz*srx)*pointOri.y + crx*cry*pointOri.z) * coeff.x
+ ((-cry*crz - srx*sry*srz)*pointOri.x
+ (cry*srz - crz*srx*sry)*pointOri.y - crx*sry*pointOri.z) * coeff.z;
float arz = ((crz*srx*sry - cry*srz)*pointOri.x + (-cry*crz-srx*sry*srz)*pointOri.y)*coeff.x
+ (crx*crz*pointOri.x - crx*srz*pointOri.y) * coeff.y
+ ((sry*srz + cry*crz*srx)*pointOri.x + (crz*sry-cry*srx*srz)*pointOri.y)*coeff.z;
matA.at<float>(i, 0) = arx;
matA.at<float>(i, 1) = ary;
matA.at<float>(i, 2) = arz;
matA.at<float>(i, 3) = coeff.x;
matA.at<float>(i, 4) = coeff.y;
matA.at<float>(i, 5) = coeff.z;
matB.at<float>(i, 0) = -coeff.intensity;
}上述代码中arx/ary/arz即为loss函数对姿态角的偏导,coeff.x刚好为loss函数对平移x的偏导,之后构建雅克比矩阵matA。与laserOdometry章节一样,采用QR分解得到transformTobeMapped每次迭代增量matX,满足收敛条件则退出迭代。迭代后调用transformUpdate()函数更新位姿变量。
//更新位姿相关向量
void transformUpdate()
{
if (imuPointerLast >= 0) { //有imu数据
float imuRollLast = 0, imuPitchLast = 0;
while (imuPointerFront != imuPointerLast) {//front变量调整到与last变量一致,或者到激光点最近的imu数据位置
if (timeLaserOdometry + scanPeriod < imuTime[imuPointerFront]) {
break;
}
imuPointerFront = (imuPointerFront + 1) % imuQueLength;
}
if (timeLaserOdometry + scanPeriod > imuTime[imuPointerFront]) { // 当前雷达帧time大于imu数据time
imuRollLast = imuRoll[imuPointerFront];
imuPitchLast = imuPitch[imuPointerFront];
} else { //否则插值imu相邻的back与front数据
int imuPointerBack = (imuPointerFront + imuQueLength - 1) % imuQueLength;
float ratioFront = (timeLaserOdometry + scanPeriod - imuTime[imuPointerBack])
/ (imuTime[imuPointerFront] - imuTime[imuPointerBack]);
float ratioBack = (imuTime[imuPointerFront] - timeLaserOdometry - scanPeriod)
/ (imuTime[imuPointerFront] - imuTime[imuPointerBack]);
imuRollLast = imuRoll[imuPointerFront] * ratioFront + imuRoll[imuPointerBack] * ratioBack;
imuPitchLast = imuPitch[imuPointerFront] * ratioFront + imuPitch[imuPointerBack] * ratioBack;
}
transformTobeMapped[0] = 0.998 * transformTobeMapped[0] + 0.002 * imuPitchLast; //匹配后的当前帧lidar位姿加入惯导数据影响
transformTobeMapped[2] = 0.998 * transformTobeMapped[2] + 0.002 * imuRollLast;
}
for (int i = 0; i < 6; i++) {
transformBefMapped[i] = transformSum[i]; // 初始位姿
transformAftMapped[i] = transformTobeMapped[i]; //补偿后的位姿为最终位姿
}
}transformUpdate()函数首先进行imu和帧间匹配位姿的时间同步,然后赋值imuRollLast和imuPitchLast,并融合了地图匹配位姿和imu位姿。最后,将订阅的帧间匹配位姿赋值给transformBefMapped,将融合后位姿赋给最终的transformAftMapped。
/*前面完成了当前帧与地图的匹配优化,现在将当前帧特征点云保存在地图中
//当前帧边特征点
for (int i = 0; i < laserCloudCornerStackNum; i++) {
pointAssociateToMap(&laserCloudCornerStack->points[i], &pointSel);//转换到全局坐标系
int cubeI = int((pointSel.x + 25.0) / 50.0) + laserCloudCenWidth; //特征点width方向索引
int cubeJ = int((pointSel.y + 25.0) / 50.0) + laserCloudCenHeight;
int cubeK = int((pointSel.z + 25.0) / 50.0) + laserCloudCenDepth;
if (pointSel.x + 25.0 < 0) cubeI--;
if (pointSel.y + 25.0 < 0) cubeJ--;
if (pointSel.z + 25.0 < 0) cubeK--;
if (cubeI >= 0 && cubeI < laserCloudWidth &&
cubeJ >= 0 && cubeJ < laserCloudHeight &&
cubeK >= 0 && cubeK < laserCloudDepth) {
int cubeInd = cubeI + laserCloudWidth * cubeJ + laserCloudWidth * laserCloudHeight * cubeK; //边特征点对应的cube索引号
laserCloudCornerArray[cubeInd]->push_back(pointSel); //特征点存入cube中
}
}完成当前帧特征点与与地图的匹配优化后,需要将当前帧特征点云加入地图中。上述是当前帧的边特征点云,首先将边特征点通过优化后的位姿转换到全局坐标系,然后计算应对的cube索引cubeInd,最后将特征点pointSel加入laserCloudCornerArray[cubeInd]中。平面特征点处理与线特征点一样,不再赘述。
//对当前帧而言,存在有限个邻域cube用于配准
for (int i = 0; i < laserCloudValidNum; i++) { //对当前帧有效的邻域cube数量
int ind = laserCloudValidInd[i];
laserCloudCornerArray2[ind]->clear(); //对cube内边特征点云降采样
downSizeFilterCorner.setInputCloud(laserCloudCornerArray[ind]);
downSizeFilterCorner.filter(*laserCloudCornerArray2[ind]);
laserCloudSurfArray2[ind]->clear(); //对cube内面特征点云降采样
downSizeFilterSurf.setInputCloud(laserCloudSurfArray[ind]);
downSizeFilterSurf.filter(*laserCloudSurfArray2[ind]);
pcl::PointCloud<PointType>::Ptr laserCloudTemp = laserCloudCornerArray[ind]; //最终cube内特征点云存储在laserCloudCornerArray中
laserCloudCornerArray[ind] = laserCloudCornerArray2[ind];
laserCloudCornerArray2[ind] = laserCloudTemp;
laserCloudTemp = laserCloudSurfArray[ind];
laserCloudSurfArray[ind] = laserCloudSurfArray2[ind];
laserCloudSurfArray2[ind] = laserCloudTemp;
}特征点插入地图后,需要对地图进行降采样,上述代码对当前帧有效邻域cube进行了滤波操作。
最后发布各种消息,代码中每5帧发布一次。首先发布当前帧附近laserCloudSurroundNum个cube中的特征点云,同样需要滤波处理。接着发布当前帧点云,需通过优化后的位姿转换到全局坐标系。最后发布优化后的lidar位姿并tf广播。
至此,完成了loam的第三部分地图laserMapping代码解析。地图匹配章节主要是在前一章帧间匹配基础上优化lidar位姿,达到更好的里程计效果。