本文的前提是规划器已经为轮式移动机器人(WMR)规划出了满意的路径,倘若建立了路径与时间确切的对应关系,则称之为轨迹。本文重点讨论如何实现对于确定轨迹的跟踪问题。
机器人坐标系
在平面上,该机器人底盘总的维数是3个:2个为平面中的位置;1个为沿垂直轴的方向的转动,它与平面正交。把机器人的底盘看作刚体,忽略机器人和它的轮子间内在的关联和自由度。随动轮仅在运动过程中起支撑作用,其在运动学模型中的影响可忽略不计。假设WMR的左右轮均为刚体,只能沿着车轮滚动的方向前进,无侧向滑动。为了确定机器人在平面中的位置,如下图所示,建立了平面全局参考坐标系和机器人局部参考坐标系之间的关系。
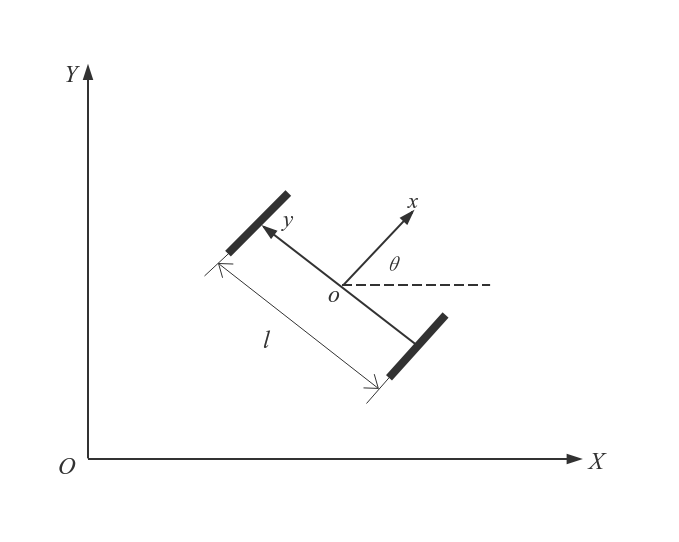
将平面上任意一点选为原点O O
版权声明:本文为qq_38189843原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。