论文:Multi-View Reconstruction PreservingWeakly-Supported Surfaces
补充:Exploiting Visibility Information in Surface Reconstruction to Preserve Weakly Supported Surfaces
(c)弱支持区域效果不好
2. The Base-line method
图的节点对应于 Delaunay 四面体,有向边对应于相邻四面体之间的有向三角形。 考虑从四面体 a aa 的一侧看的相邻四面体 a aa 和 b bb 之间的面 f ff。面 f ff 在图中由从节点 a aa 指向节点 b bb 的边表示。该图增加了一个额外的 s o u r c e sourcesource (代表外部)和一个s i n k sinksink(代表内部)节点,以及从源到每个节点的边(s − e d g e s s-edgess−edges)和从每个节点到汇的边(t − e d g e s t-edgest−edges)。最后,切割的有向边(从标记为s o u r c e sourcesource 的节点到标记为s i n k sinksink的节点的有向边)对应于重建的定向表面上的三角形。
一般把点作为结点,点之间的连线作为边,为了找到从源点到汇点的连线,切割点之间的连线(边); 这个为了求解曲面,以此类比。
图4展示了边(面)的权重的计算方法。考虑一个点 p pp 和一个相关的相机中心 c cc。把所有与线段( c , p + p − c ∣ p − c ∣ σ ) (c, p + \frac{p-c}{|p−c|}σ)(c,p+∣p−c∣p−cσ)相交的四面体,按照交点到 c cc 的距离从大到小排序,记为交叉四面体。
s − t s-ts−t 图的所有边(面)的权重最初设置为零。对于每个点 p pp 和分配给 p pp 的相机中心 c cc,交叉面体(与上述线段相交)的边(面)的权重增加一个常数值 α v i s α_{vis}αvis。第一个交叉四面体分配无穷大值(图 4 中的四面体 i 1 i_1i1)。最后,将 α v i s α_{vis}αvis值添加到最后一个交叉四面体的 t tt 边(见图 4)。
s − t s-ts−t 图的有向边的权重由 camera-point对 的数量决定,其中点被相机中边缘对应的面所遮挡。一个节点的 t − e d g e t-edget−edge 权重由camera-point 对的数量决定,对于这些点,该点在摄像机中遮挡了相应的四面体,直到该点后面的深度 σ σσ。四面体的free-space-support是对应的四面体的节点的所有传入边的权重之和。 free-space-support与点被相机中的四面体遮挡的 camera-point对 的总数有关。
补充论文:Exploiting Visibility Information in Surface Reconstruction to Preserve Weakly Supported Surfaces
- camera-point 对:



- free-space-support:? ?f是一种测量。粗略地说,如果一个中心为 ? ?c 的传感器看到一个点 ? ?p,那么视线段 ( ? , ? ) ∈ ? (?, ?) ∈ ?(c,p)∈S 支持 ? ?c 和 ? ?p 之间的emptiness。四面体 ? ?T 的 ? ( ? ) ?(?)f(T) 是根据与 ? ?T 相交的线段 ( ? , ? ) ∈ ? (?, ?) ∈ ?(c,p)∈S 计算得出的。

- ? ? ? ?_{??}fcp: 函数 ? ? ? ( ? ) ?_{??}(?)fcp(x) 是一个分段线性函数,它对视线 (?, ?) ∈ ?(底部)穿过的四面体 ? ? ?_?Tj 的自由空间支持 ? ( ? ? ) ?(?_?)f(Tj) 进行插值。

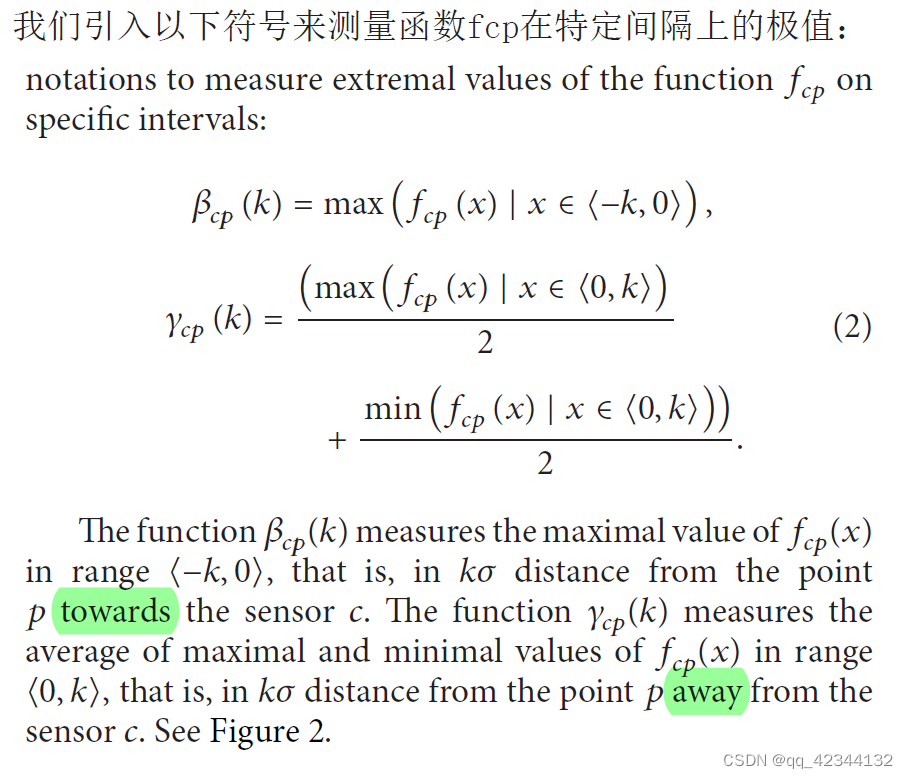
- Free-Space Support Jump
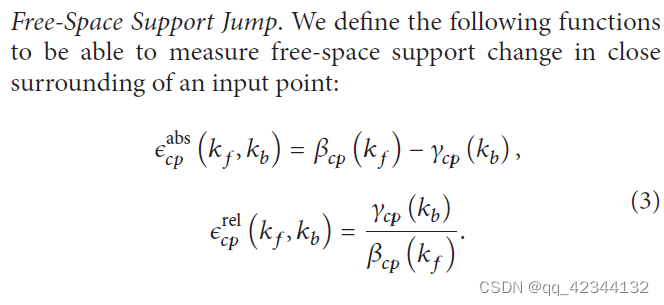
函数 ε c p a b s \varepsilon_{cp}^{abs}εcpabs 评估输入点?周围的⟨−k f σ k_{f}\sigmakfσ,k b σ k_{b}\sigmakbσ⟩中视线( ? , ? ) (?,?)(c,p)上自由空间支持的绝对变化。 函数 ε c p r e l \varepsilon_{cp}^{rel}εcprel 评估相对变化。
之所以选择这样的函数,是因为我们希望能够检测到某个三维点附近自由空间证据的巨大变化。然而,仅仅测量相对变化是不够的,因为小数字(噪音)的相对变化也可能是显著的。因此,我们研究绝对变化和相对变化的结合。 - Outliers Level
如果一个点 ? ?p 代表一个真实的界面点,那么函数γ ? ? \gamma_{??}γcp的值代表异常值视线( ? , ? ) ∈ ? (?,?)∈?(c,p)∈S穿过整个空间对应部分的数量。该函数反映了在一个物体应该占据的空间内积累的平均自由空间证据。只有被传感器看到但应该被物体遮挡的离群点才能对该证据做出贡献;因此,函数γ ? ? \gamma_{??}γcp反映了离群点的水平。
回到原论文:
我们必须指出,在我们的方法中,我们对四面体化的每个 3D 点 p pp 使用不同的 α v i s α_{vis}αvis 值,而在基线方法中,α v i s α_{vis}αvis设置为常数。将其记作 α v i s ( p ) α_{vis}(p)αvis(p)。Delaunay四面体化的点不是输入的三维点云 X XX 的点(距离有一定的限制)。让我们把与输入的三维点云中的一个点 x ∈ X x∈Xx∈X 相关的摄像机数量表示为 N c ( x ) N_c(x)Nc(x)。在我们的方法中,我们将输入的三维点云中的点 ( x ∈ X ) (x∈X)(x∈X) 分组为四面体化的点( p ∈ T ) (p∈T)(p∈T),使得 S ( p ) ⊂ X S(p)⊂XS(p)⊂X 在 p pp 周围的距离 γ γγ 内不为空,并且∀ p i , p j ∈ T ; ∣ p i − p j ∣ > γ ∀p_i,p_j∈T;|p_i - p_j| > γ∀pi,pj∈T;∣pi−pj∣>γ。 α v i s ( p ) α_{vis}(p)αvis(p)与 N c ( p ) N_c(p)Nc(p)不一样,因为在α v i s ( p ) α_{vis}(p)αvis(p)中可以涉及到更多与同一摄像机相关的点。因此,对于一个噪声点 p pp 来说,α v i s ( p ) α_{vis}(p)αvis(p)的值应该很小,因为噪声点通常是由少数相机创造的,在其 γ γγ 邻域内没有其他点。
α v i s ( p ) α_{vis}(p)αvis(p)与 N c ( p ) N_c(p)Nc(p)不一样,因为在α v i s ( p ) α_{vis}(p)αvis(p)中可以涉及到更多与同一摄像机相关的点。因此,对于一个噪声点 p pp 来说,α v i s ( p ) α_{vis}(p)αvis(p)的值应该很小,因为噪声点通常是由少数相机创造的,在其 γ γγ 邻域内没有其他点。
计算四面体时点之间的距离大于γ,但是实际输入的点云在γ范围内不止一个点故计算四面体中点的α_{vis}时是γ范围内的所有点的views和,而不是单单一个点的view。
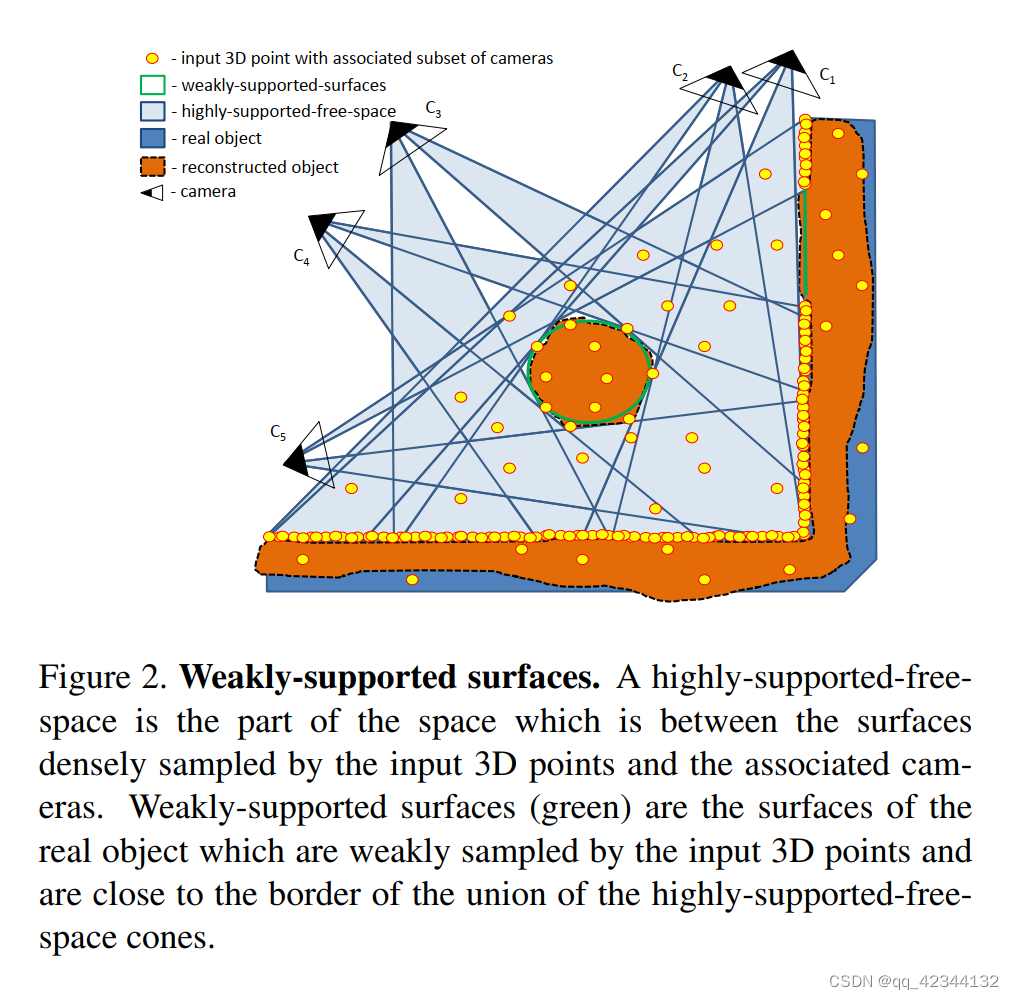
基线方法的问题在于该公式不足以获得弱支撑表面。图 2 说明了存在弱支撑表面的情况。图 1 中的真实世界实验证明了这种情况。图1©显示,基线法不能重建弱支撑的表面(瓶子)。请注意,对于采样相对密集的表面,即噪声量明显低于表面采样的密度,基线法可以完美地工作,而我们的方法也给出了完全相同的结果。
3. Our approach
3.1. Large free-space-support jump
靠近或位于真实表面上并应标记为外部的四面体的 free-space-support 应该比附近的应标记为内部的四面体的free-space-support 大得多。这适用于由输入点云密集采样的表面以及弱支撑表面。 图 3(e) 表明它确实成立。在密集采样的外墙和弱支撑的地平面上,free-space-support跳跃都很大。
3.2. Weakly-supported surfaces t-weight assumption
在基线方法公式中,靠近或位于真实但弱支撑表面上的四面体的 t tt 边权重应标记为内部,远小于相应节点的free-space-support。让我们假设 σ = 0 σ = 0σ=0 并表示一个四面体,它位于真实但弱支撑的表面上,应该用 v vv 标记为内部。在这种情况下,四面体 v vv 的 t tt 边权重 w t w_twt 取决于与四面体 v vv 的四个点相关联的相机数量。四面体 v vv 的free-space-support w s w_sws 取决于被四面体 v vv 遮挡(在摄像机中)的所有点的摄像机数量。 因此,即使是少量错误重构的点也会使值 w s w_sws 远大于值 w t w_twt(参见图 5)。虽然我们假设 σ = 0 σ = 0σ=0,但结论也适用于小 σ σσ。 参数 σ σσ 不能设置为很大的值(见[15])。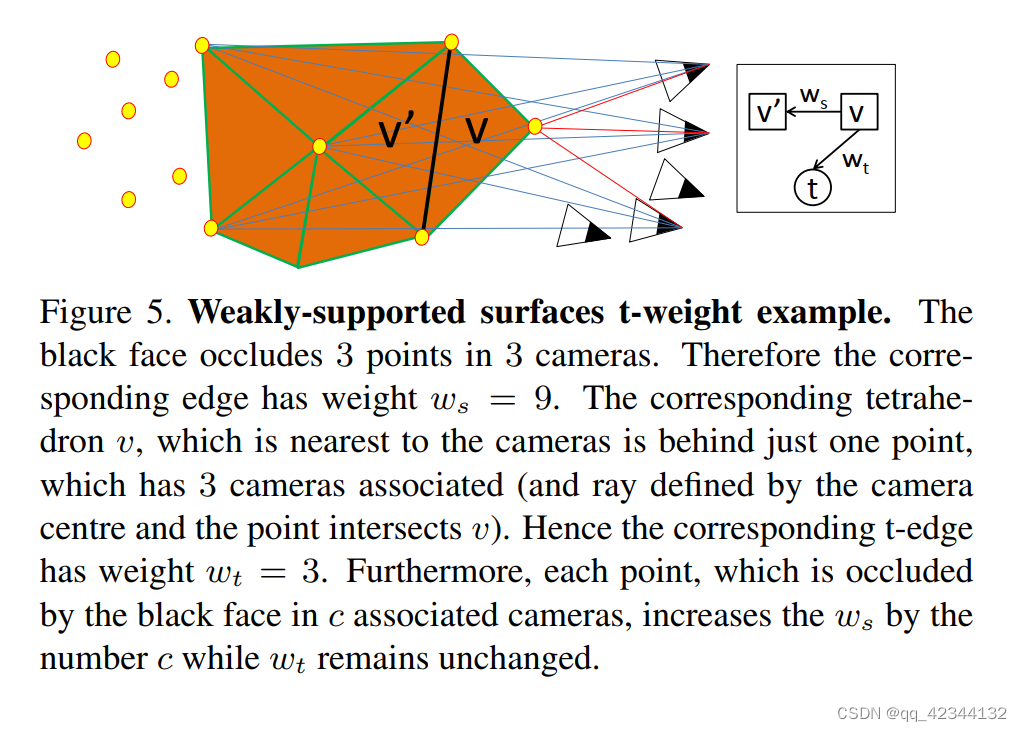
黑色的face遮住了3台摄像机中的3个点。因此,相应的边有权重ws=9。最接近摄像机的相应四面体 v 仅位于一个点后面,该点有 3 个相关联的摄像机(并且光线由摄像机中心定义,并且该点与 v 相交)。因此,相应的 t-edge 的权重为 wt=3。此外,被 c 个相关摄像机中的黑face遮挡的每个点,都会使 ws 增加c,而 wt 保持不变。
3.3. Synthetic example
图 6(a)、(b) 的顶部说明了弱支撑面作为四面体化的一部分出现的情况。底部代表相应的图。中间代表相应边的权重。节点之间的边权重为浅蓝色,t − e d g e s t-edgest−edges 的权重为深棕色。表面上有一个大的 Free-Space Support Jump;w 56 w_{56}w56 远高于 w 67 w_{67}w67 (w 78 w_{78}w78)。 在这个例子中,有:∞ > w 12 > . . . > w 56 > w 67 + t 6 > w 78 + t 6 + t 7 > w 89 + t 6 + t 7 + t 8 < t 6 + t 7 + t 8 + t 9 ∞ > w_{12} > ... > w_{56} > w_{67} + t_6 > w_{78} + t_6 + t_7 >w_{89} + t_6 + t_7 + t_8 < t_6 + t_7 + t_8 + t_9∞>w12>...>w56>w67+t6>w78+t6+t7>w89+t6+t7+t8<t6+t7+t8+t9和 w 56 > w 57 w_{56} > w_{57}w56>w57。此合成示例中的最小切割是红线所示的切割。 最小切割的标签与正确的解决方案不对应。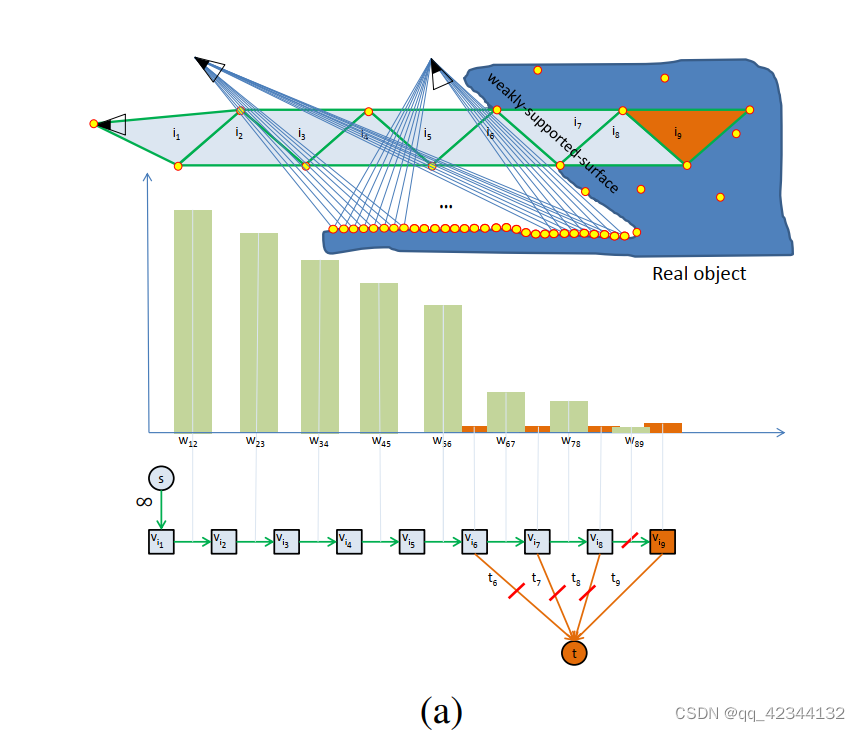
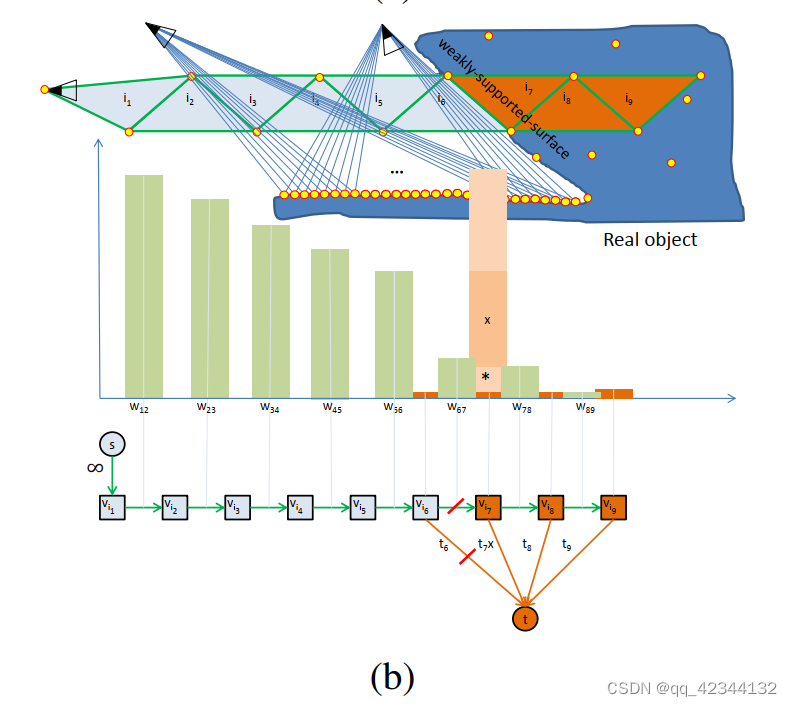
弱支撑表面 t tt 权重假设成立;w 67 w_{67}w67 远高于 t 7 t_7t7,所有其他 t i t_iti 与 t 7 t_{7}t7 大致相同,图 6(a)。这导致最小切割将远离正确的表面。 图 3 中的实际实验证明了这种效果。自由空间支撑跳跃在弱支撑地平面附近很大,但在基线方法中单独使用 α v i s ( p ) α_{vis}(p)αvis(p) 不足以重建弱支撑地平面,图 3(f)。因此在大跳跃的地方,我们用 t 7 t_7t7 乘以一个确信选择的 x xx,这样图6(b)中描述的切割就变得最小,我们就能得到正确的标记。可以看出,如果我们将 x xx 设置为 w 56 w_{56}w56-w 78 w_{78}w78,那么我们将获得正确的解决方案。我们的方法是有顺序的。我们首先以与基线方法相同的方式计算所有权重。然后我们搜索所有大跳跃并乘以相应的 t − e d g e t-edget−edge 权重,如示例中所示。这在图 3(h) 中得到了实验支持,因为我们的方法仅改变合成示例所描述的 t − e d g e t-edget−edge 的权重,并且足以重建弱支撑地平面。