最优控制和轨迹规划学习笔记
包含多个实际案例
倒立摆上翻控制
满足车辆运动学约束的路径规划
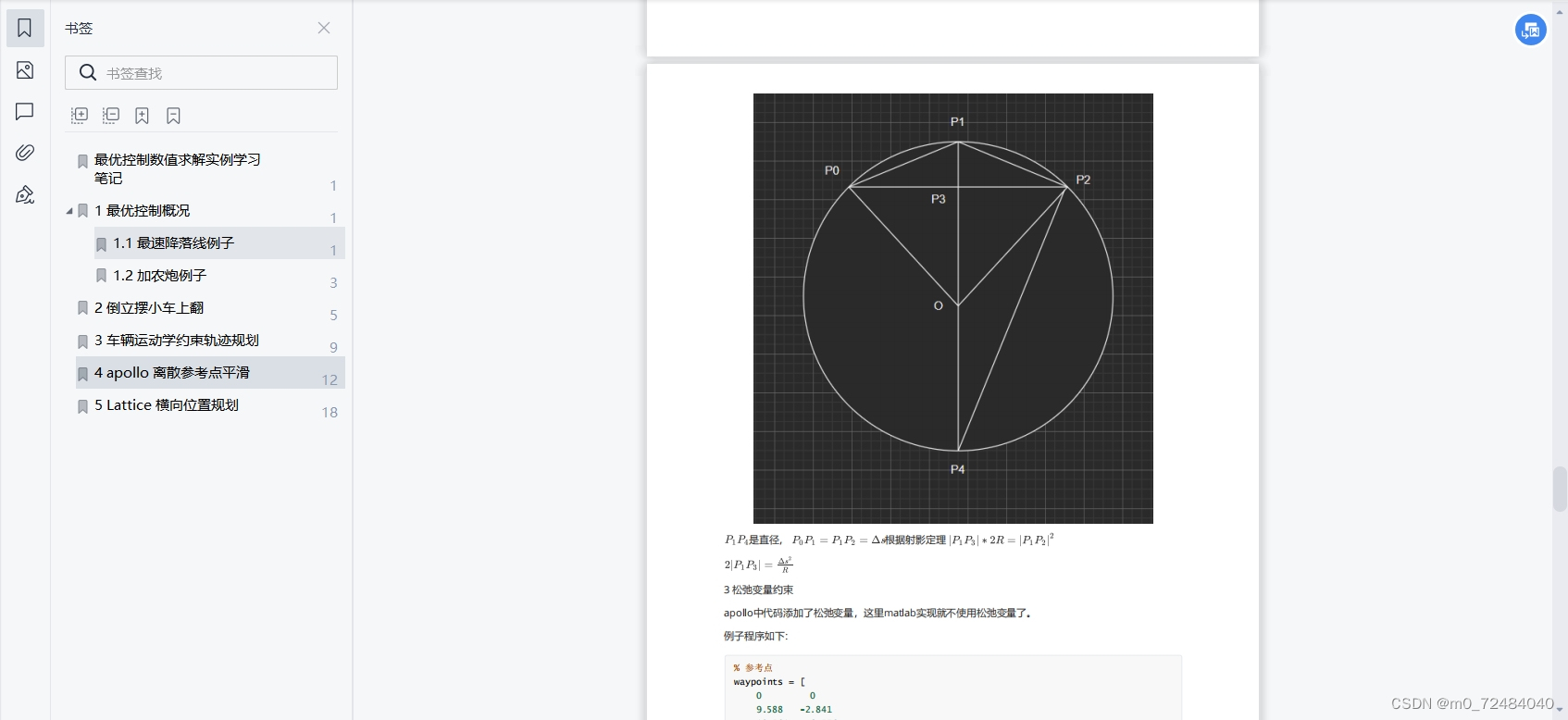
离散点参考线优化
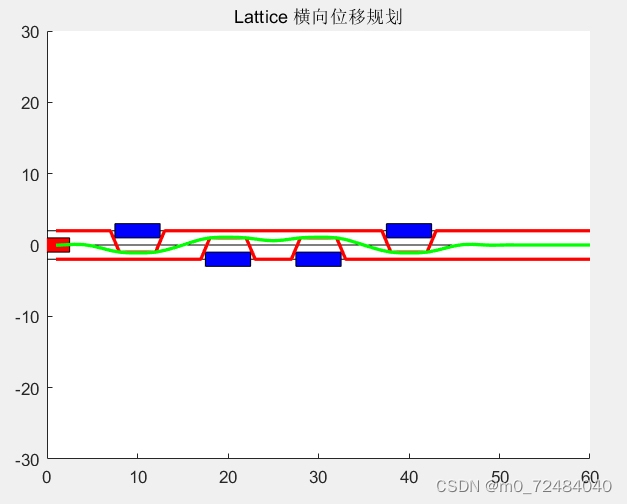
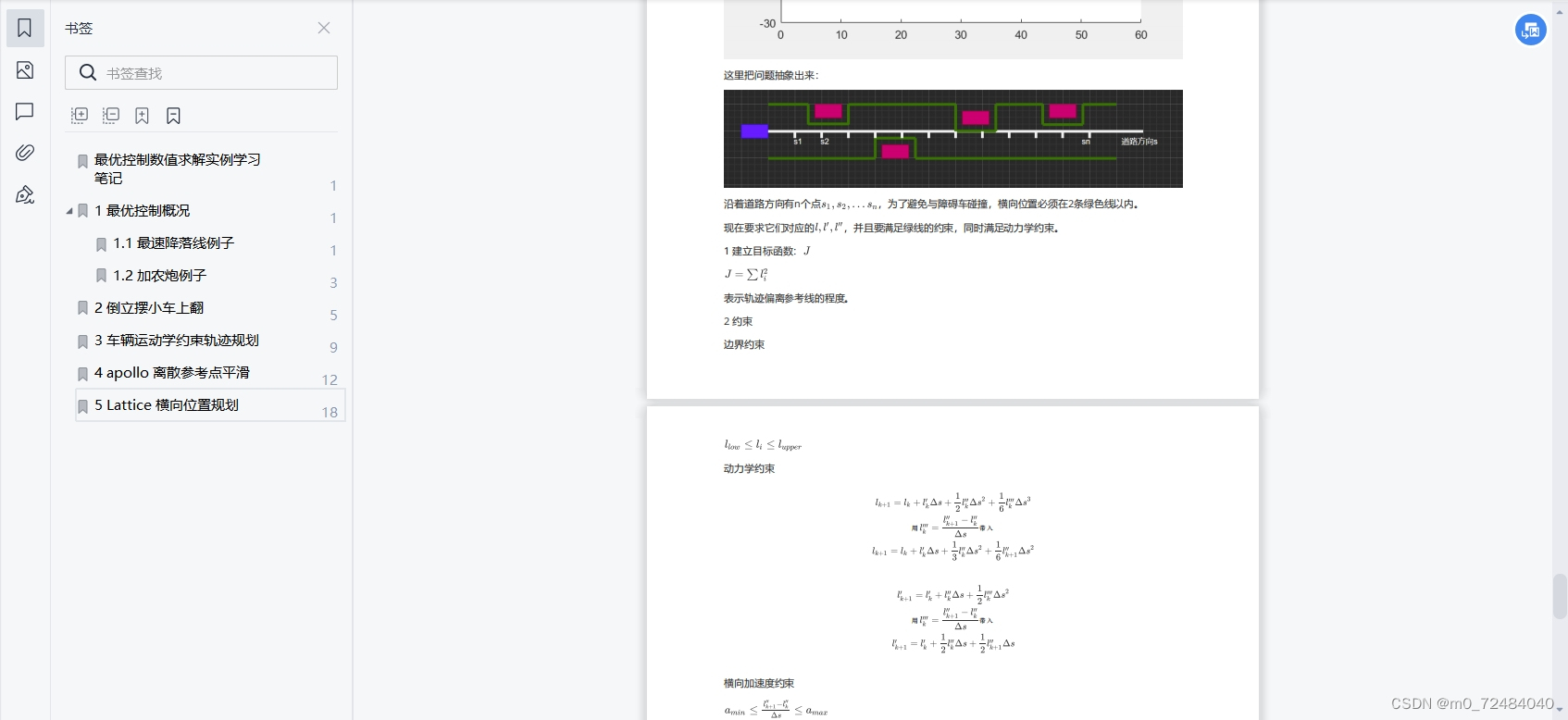
lattice横向距离规划 YYYYID:5745658004330616
YYYYID:5745658004330616 autorobot
autorobot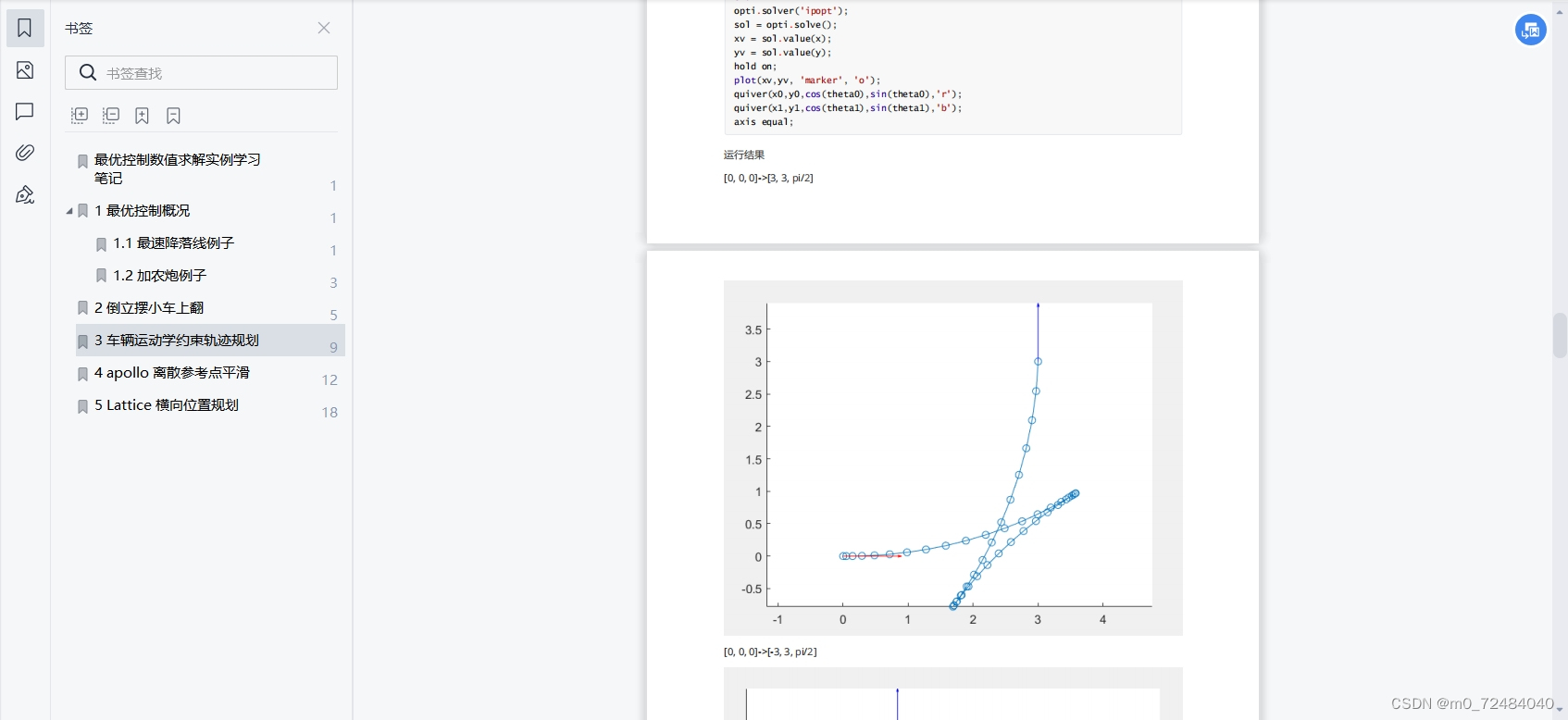
版权声明:本文为m0_72484040原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。
最优控制和轨迹规划学习笔记
包含多个实际案例
倒立摆上翻控制
满足车辆运动学约束的路径规划
离散点参考线优化
lattice横向距离规划YYYYID:5745658004330616autorobot