本章主要介绍了直接法和光流法。
意义:
1. 关键点的提取和描述子的计算十分耗时
2. 使用特征点时忽略除了特征点以外所有的信息
3. 相机可能运动到特征缺失的地方
4. 直接法还具有恢复稠密或半稠密机构的能力
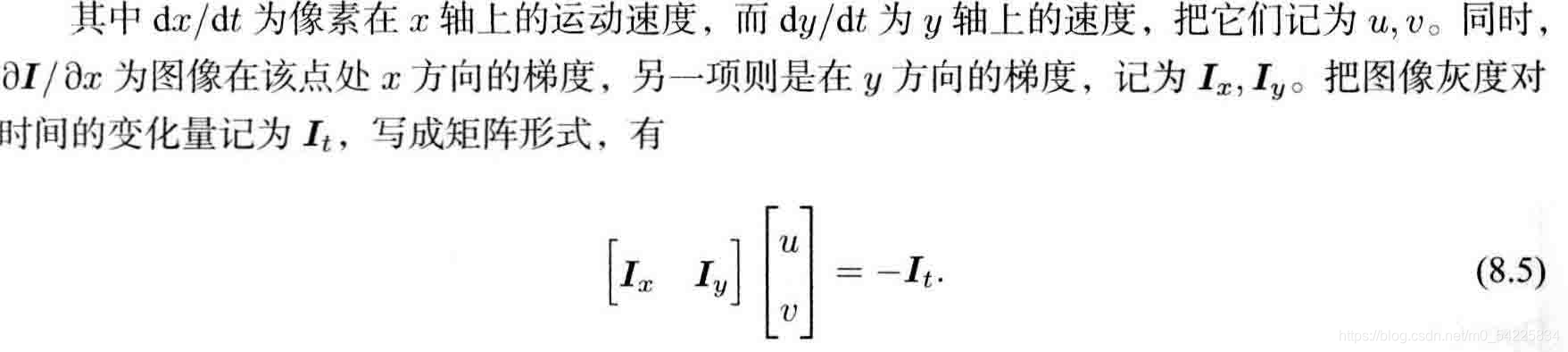
LK光流:计算像素的运动
注:LK光流只是描述了两个图像之间的运动关系,并没有得出R、t
单层光流理论
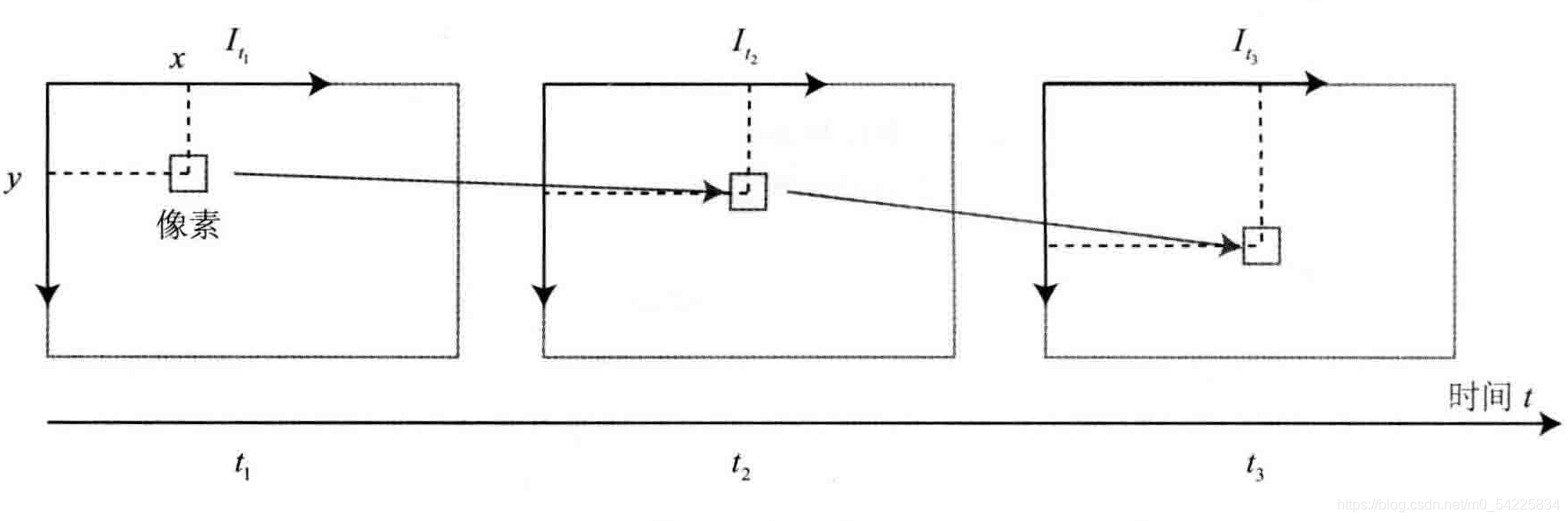
假设:
1. 同一个空间点在不同图像的灰度值相同(假设性较强)
2. 某一窗口内的像素具有相同的运动


 实践
实践
opencv实现
vector<Point2f> pt1, pt2;
for (auto &kp: kp1) pt1.push_back(kp.pt);
vector<uchar> status;
vector<float> error;
cv::calcOpticalFlowPyrLK(img1, img2, pt1, pt2, status, error);只需使用cv::calcOpticalFlowPyrLK()函数并提供,两张图片及对应特征点
高斯牛顿法
把问题转化为

对应的梯度是第二个图像在处的梯度
1. 算出误差
double error = GetPixelValue(img1, kp.pt.x + x, kp.pt.y + y) -
GetPixelValue(img2, kp.pt.x + x + dx, kp.pt.y + y + dy);
//kp.pt.x+x表示第x个关键点的x坐标2.计算雅可比:算的是以(x,y)为中心,以2*half_patch_size为边的正方形里每一个点的梯度值(两层for循环)
if (inverse == false) {//图像2在x,y处的梯度:(f(x+1)-f(x-1))/2
J = -1.0 * Eigen::Vector2d(
0.5 * (GetPixelValue(img2, kp.pt.x + dx + x + 1, kp.pt.y + dy + y) -
GetPixelValue(img2, kp.pt.x + dx + x - 1, kp.pt.y + dy + y)),
0.5 * (GetPixelValue(img2, kp.pt.x + dx + x, kp.pt.y + dy + y + 1) -
GetPixelValue(img2, kp.pt.x + dx + x, kp.pt.y + dy + y - 1))
);
}3. 计算H,b:H和b是正方形里所有点算出来的和(实际上这几个点占的区域很小,可以看成一个点)
b += -error * J;
cost += error * error;
if (inverse == false || iter == 0) {
// also update H
H += J * J.transpose();
}4. 高斯牛顿解决
Eigen::Vector2d update = H.ldlt().solve(b);
// update dx, dy
dx += update[0];
dy += update[1];
lastCost = cost;多层光流理论

代码
1. 创建三角:0~5表示初始图像,缩放倍率为0.5 的图像……
vector<Mat> pyr1, pyr2; // image pyramids
for (int i = 0; i < pyramids; i++) {
if (i == 0) {
pyr1.push_back(img1);
pyr2.push_back(img2);
} else {
Mat img1_pyr, img2_pyr;
cv::resize(pyr1[i - 1], img1_pyr,
cv::Size(pyr1[i - 1].cols * pyramid_scale, pyr1[i - 1].rows * pyramid_scale));
cv::resize(pyr2[i - 1], img2_pyr,
cv::Size(pyr2[i - 1].cols * pyramid_scale, pyr2[i - 1].rows * pyramid_scale));
pyr1.push_back(img1_pyr);
pyr2.push_back(img2_pyr);
}
}2. 对每一层图像进行单层光流,并为下一层初始化
for (int level = pyramids - 1; level >= 0; level--) {
// from coarse to fine
success.clear();
t1 = chrono::steady_clock::now();
OpticalFlowSingleLevel(pyr1[level], pyr2[level], kp1_pyr, kp2_pyr, success, inverse, true);//对每一层进行单层光流
t2 = chrono::steady_clock::now();
auto time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1);
cout << "track pyr " << level << " cost time: " << time_used.count() << endl;
//为下一层初始化
if (level > 0) {
for (auto &kp: kp1_pyr)
kp.pt /= pyramid_scale;
for (auto &kp: kp2_pyr)
kp.pt /= pyramid_scale;
}
}总结:
光流法科研加速基于特征点的视觉里程计,避免计算和匹配描述子的过程,但要求相机运动比较平滑。
直接法
单层直接法理论
问题:已知p1,P,位姿1,求第二个位姿使最小(一般是使用RGB-D或者双目快速获得深度)
即
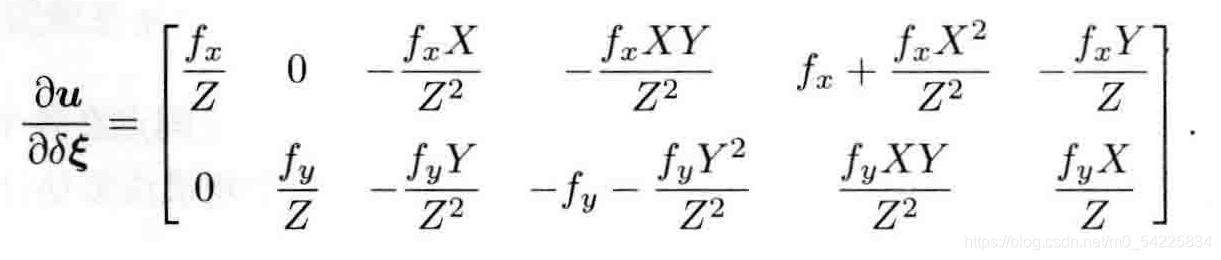
令q=TP, u=Kq/Z
J= ![]() =
=![]()
其中:
![]()
代码
1. 计算p1对应的空间点P,并使用初始的T转换到p2所在的坐标系,即:q=T*p
Eigen::Vector3d point_ref =
depth_ref[i] * Eigen::Vector3d((px_ref[i][0] - cx) / fx, (px_ref[i][1] - cy) / fy, 1);
Eigen::Vector3d point_cur = T21 * point_ref;2. 确定参数
projection[i] = Eigen::Vector2d(u, v);
double X = point_cur[0], Y = point_cur[1], Z = point_cur[2],
Z2 = Z * Z, Z_inv = 1.0 / Z, Z2_inv = Z_inv * Z_inv;
double error = GetPixelValue(img1, px_ref[i][0] + x, px_ref[i][1] + y) -
GetPixelValue(img2, u + x, v + y);
Matrix26d J_pixel_xi;
Eigen::Vector2d J_img_pixel;
J_pixel_xi(0, 0) = fx * Z_inv;
J_pixel_xi(0, 1) = 0;
J_pixel_xi(0, 2) = -fx * X * Z2_inv;
J_pixel_xi(0, 3) = -fx * X * Y * Z2_inv;
J_pixel_xi(0, 4) = fx + fx * X * X * Z2_inv;
J_pixel_xi(0, 5) = -fx * Y * Z_inv;
J_pixel_xi(1, 0) = 0;
J_pixel_xi(1, 1) = fy * Z_inv;
J_pixel_xi(1, 2) = -fy * Y * Z2_inv;
J_pixel_xi(1, 3) = -fy - fy * Y * Y * Z2_inv;
J_pixel_xi(1, 4) = fy * X * Y * Z2_inv;
J_pixel_xi(1, 5) = fy * X * Z_inv;
3. 求
J_img_pixel = Eigen::Vector2d(
0.5 * (GetPixelValue(img2, u + 1 + x, v + y) - GetPixelValue(img2, u - 1 + x, v + y)),
0.5 * (GetPixelValue(img2, u + x, v + 1 + y) - GetPixelValue(img2, u + x, v - 1 + y))
);4. 求J、H、b
Vector6d J = -1.0 * (J_img_pixel.transpose() * J_pixel_xi).transpose();
hessian += J * J.transpose();
bias += -error * J;
cost_tmp += error * error;5. 叠加
if (cnt_good) {
// set hessian, bias and cost
unique_lock<mutex> lck(hessian_mutex);
H += hessian;
b += bias;
cost += cost_tmp / cnt_good;
}多层也差不多,就不写了
直接法的优缺点
补:
// bilinear interpolation
inline float GetPixelValue(const cv::Mat &img, float x, float y) {
// boundary check
if (x < 0) x = 0;
if (y < 0) y = 0;
if (x >= img.cols) x = img.cols - 1;
if (y >= img.rows) y = img.rows - 1;
uchar *data = &img.data[int(y) * img.step + int(x)];
float xx = x - floor(x);
float yy = y - floor(y);
return float(
(1 - xx) * (1 - yy) * data[0] +
xx * (1 - yy) * data[1] +
(1 - xx) * yy * data[img.step] +
xx * yy * data[img.step + 1]
);
}
opencv
在图像img2上画图
cv::cvtColor(img2, img2_single, CV_GRAY2BGR);
for (int i = 0; i < kp2_single.size(); i++) {
if (success_single[i]) {
cv::circle(img2_single, kp2_single[i].pt, 2, cv::Scalar(0, 250, 0), 2);
cv::line(img2_single, kp1[i].pt, kp2_single[i].pt, cv::Scalar(0, 250, 0));
}
}
修改图像的分辨率
cv::resize(pyr1[i - 1], img1_pyr,
cv::Size(pyr1[i - 1].cols * pyramid_scale, pyr1[i - 1].rows * pyramid_scale));cv::parallel_for_(cv::Range(0, px_ref.size()),
std::bind(&JacobianAccumulator::accumulate_jacobian, &jaco_accu, std::placeholders::_1));
//多线程运行accumulate_jacobian,运行px_ref.size()次,线程不定
版权声明:本文为m0_54225834原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。