一、简介
顾名思义,这个算法是通过对点云进行随机抽样的方式来获取原始点云的子集,随机采样的方式有很多种,其中PCL中所采用的方式如下所示:
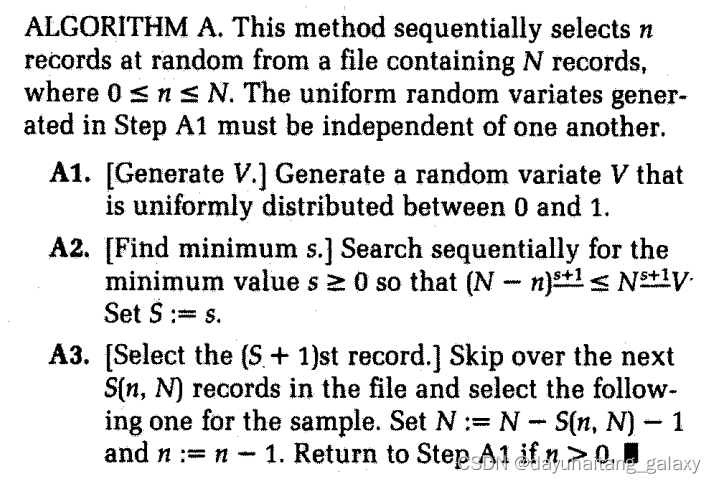
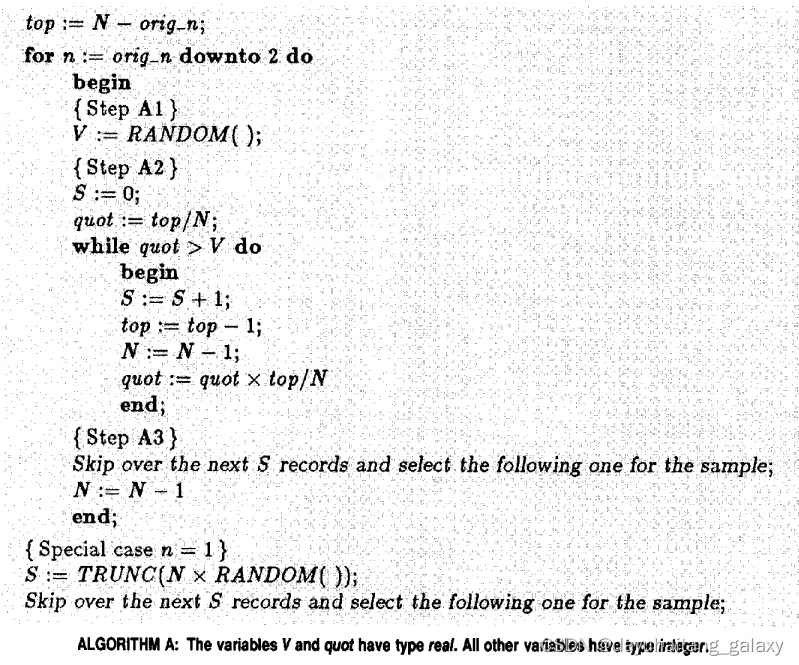
该算法时间复杂度为O(N),并且结果为排序的索引数据。
二、实现代码
相关配置可以参考文章https://blog.csdn.net/dayuhaitang1/article/details/124503487中的非插件基础配置,核心代码如下所示:
void 版权声明:本文为dayuhaitang1原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。