ROS是机器人操作系统(Robot Operating System)的英文缩写。ROS是用于编写机器人软件程序的一种具有高度灵活性的软件架构
基于飞腾FT-2000/4-DSK主板在ubuntu18.04.4 LTS下安装ROS melodic版本
1.配置ros仓库源
配置仓库源可以从packages.ros.org网站安装
#sudo sh –c ‘echo “deb https://packages.ros.org/ros/ubuntu $(lsb_release -sc) main ” >/etc/apt/sources.list.d/ros-latest.list’
#curl –s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc上一步若有报错的话,使用浏览器登录该链接
(https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc),将内容复制下来,手动创建ros.asc文件,然后再执行该指令
#apt-key add ros.asc 更新apt-get update (飞腾FT-2000/4-DSK开发板网卡RTL8211E 在ubuntu18.04.4 LTS release版本中暂无驱动,个人使用的是USB转网口AX88179,需要连接网络进行下面步骤,以下步骤都是以root用户进行的)
更新仓库源 apt-get update
2.检索安装系统对应可适用的ROS版本
apt-cache search ros-*| grep desktop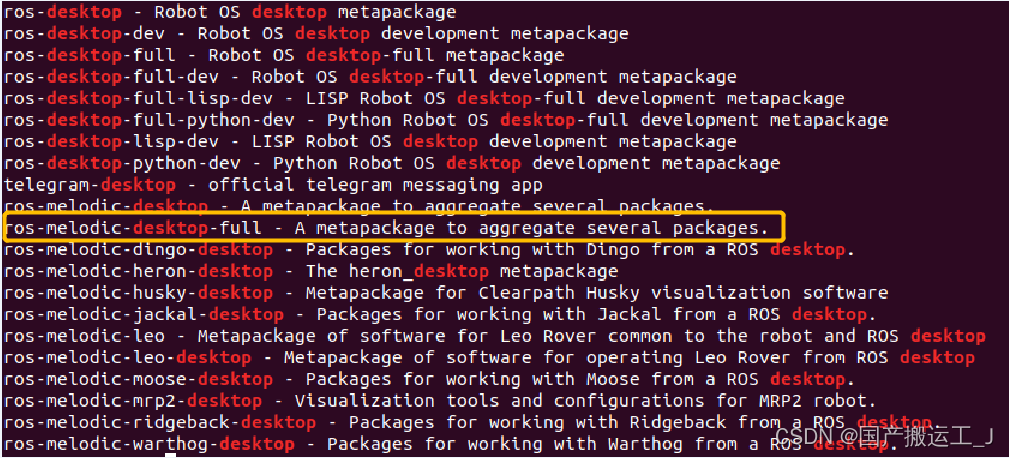
安装Desktop-Full:推荐安装,所有涉及2D及3D模拟及相关感知包都会被安装
#apt-get install ros-melodic-desktop-full设置相关环境变量,每次新打开的terminal中都需要执行
#source /opt/ros/melodic/local_setup.bash或者将该执行添加至当前用户的~/.bashrc中,执行如下指令
#echo “source /opt/ros/melodic/local_setup.bash” >>~/.bashrc3.安装构建包的依赖项
到目前为止,您已经安装了运行核心ROS软件包所需的内容。要创建和管理您自己的 ROS 工作区,需要单独分发各种工具和要求。例如,rosinstall 是一个常用的命令行工具,它使您能够使用一个命令轻松下载 ROS 包的多个源代码树
#apt-get install python3-rospkg
#apt-get install python3-catkin-pkg
#apt-get install python3-rosdep
#apt-get install python3-rosinstall
#apt-get install python3-rosinstall-generator
#apt-get install python3-wstool初始化rosdep
#apt-get update
#rosdep init
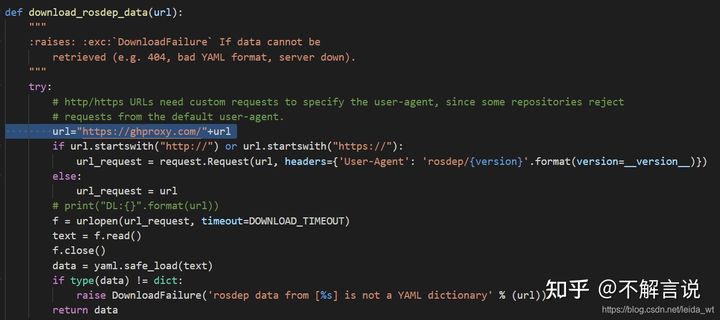
#rosdep update 执行该步骤需要使用一般用户;rosdep update 会报错失败,主要原因是因国内无法稳定的访问rawgithub,需要修改以下代码:
vim /usr/libpython3/dist-packages/rosdep2/sources_list.py 文件第311行
添加代理 url=https://ghproxy.com/+url (如下图所示)
vim /usr/lib/python3/dist-packages/rosdistro/__init__.py 文件中的DEFAULT_INDEX_URL如下
DEFAULT_INDEX_URL=‘https://ghproxy.com/https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml’修改其余5个文件(重要)文件中的地址,在地址https://raw.githubusercontent.com/..前添加GitHub Proxy 代理加速
文件/usr/lib/python3/dist-packages/rosdep2/gbpdistro_support.py 修改第36行
文件/usr/lib/python3/dist-packages/rosdep2/sources_list.py 修改第72行
文件/usr/lib/python2.7/dist-packages/rosdep2/rep3.py 修改第39行
文件/usr/lib/python2.7/dist-packages/rosdistro/manifest_provider/github.py 修改第68行,第119行
文件/usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py修改第204行添加如下代码(即在该函数块下的第一行处)gbpdistro_url = "https://ghproxy.com/" + gbpdistro_url
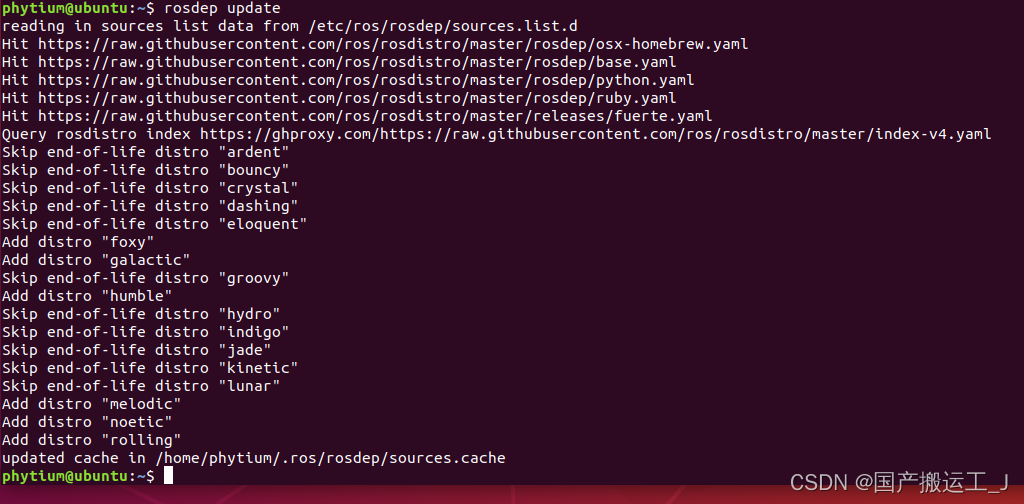
再次执行
#rosdep init
#rosdep update(非root用户)
修改完成后安装如下ROS管理软件包
#apt-get install python-rosmaster
#apt-get install ros-melodic-catkin
#apt-get install ros-melodic-roslib
#apt-get install ros-melodic-roslaunch
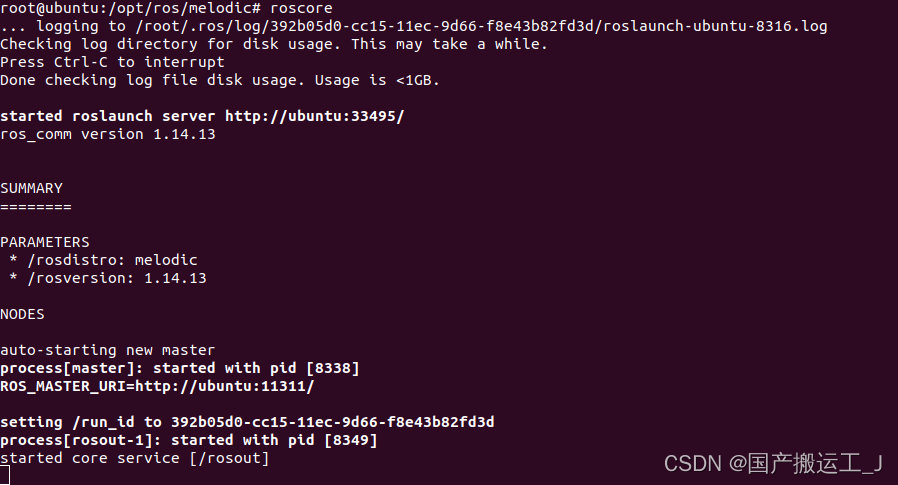
#source /opt/ros/melodic/local_setup.bash运行一个master,执行roscore ///roscore是节点和程序的集合,这些节点和程序是基于ROS的系统的先决条件
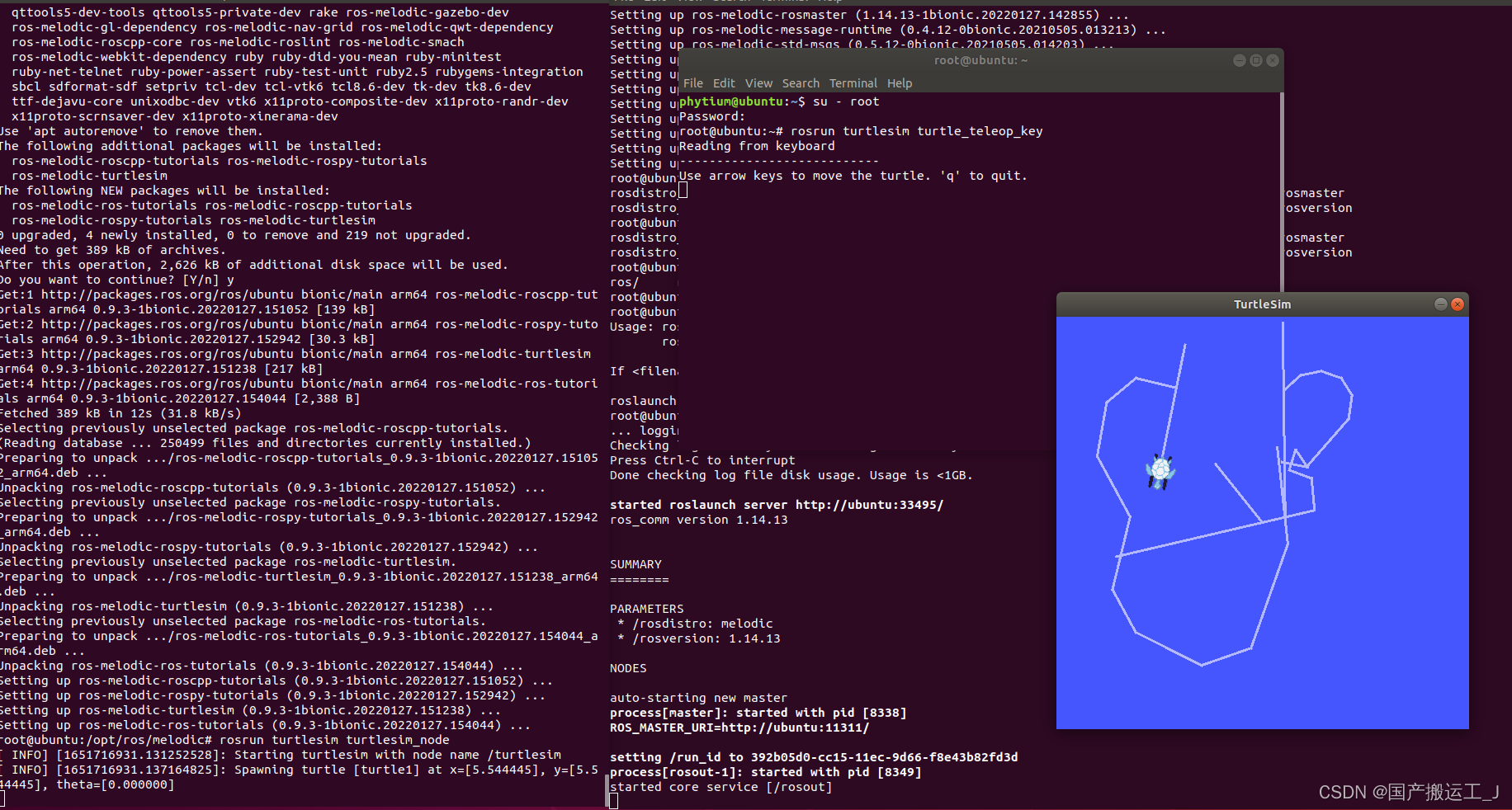
安装ros_tutorials,其包含演示ROS各种特性的包,以及帮助演示这些特性的支持包。
新打开一个terminal,使用root用户
apt-get install ros-melodic-ros-tutorialsrosrun turtlesim turtlesim_node再新打开一个terminal,使用root用户
rosrun turtlesim turtle_teleop_key///使用方向键就可以控制小乌龟爬行方向了