【更新日志】
论文信息:Off-Policy Deep Reinforcement Learning without Exploration, [Github]
本文主要介绍的是连续空间状态下的策略约束的BCQ算法, 作者首先就offline RL中容易出现extrapolation error现象进行了解释,然后用数学证明了在某些条件下这种误差是可以消除的,最后引入了BCQ算法,通过batch constrain的限制来避免这样的误差,实验证明BCQ算法的效果很好。
文章目录
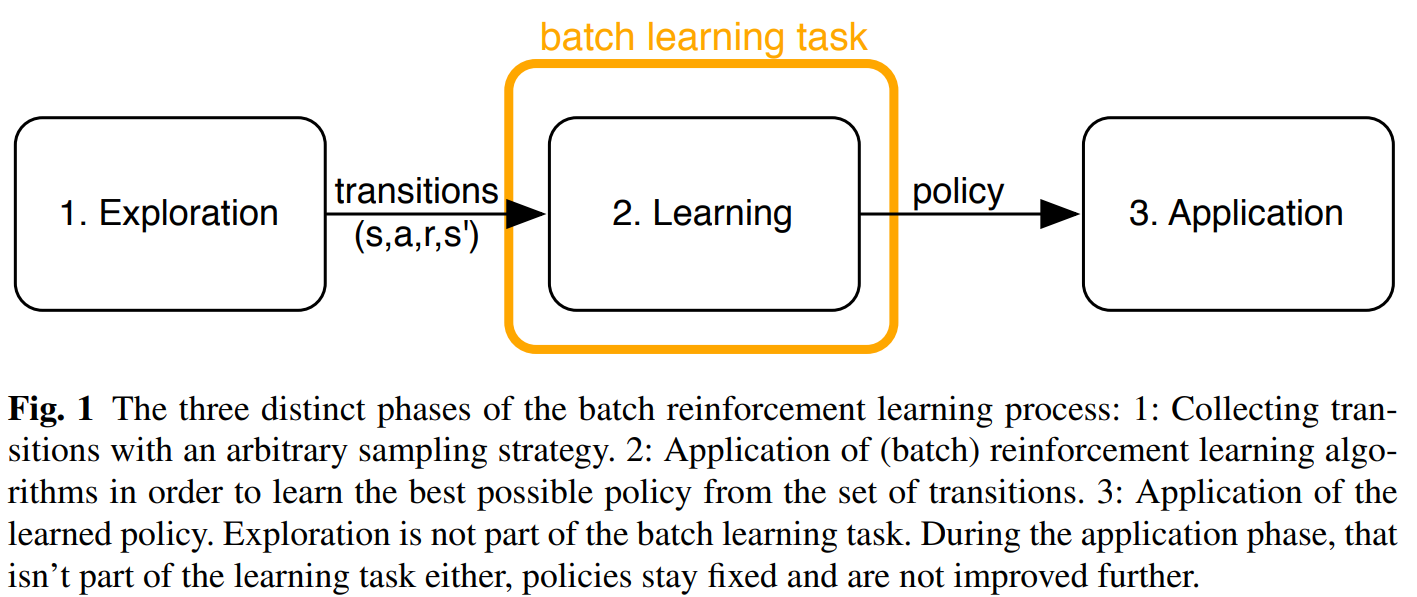
1 Batch RL
1.1 Online与Offline
Online与Offline的区别在于是否与环境实时交互,标准的的RL算法通过反复试错来学习如何执行任务,并在探索与利用之间进行平衡达到更好的表现,而Offline RL要求智能体从固定的数据集汇总进行学习,不能进行探索,因此Offline研究的是如何最大限度的利用静态的离线数据集来训练RL智能体。
1.2 Batch RL 研究方向
1.2.1 数据集
- 离线数据集大小。谷歌训练离线 QR-DQN 和 REM 所用的数据集是通过随机下采样整个 DQN 回溯数据集得到的简化数据,同时保持了相同的数据分布。与监督学习类似,模型的性能会随着数据集大小的增加而提升。例如REM 和 QR-DQN 只用整个数据集的 10% 就达到了与完全的 DQN 接近的性能;
- 离线数据集的组成。通过使用 DQN 算法回溯多个游戏的训练数据,离线 REM 和 QR-DQN 在这个低质量数据集上的表现优于最佳策略(best policy),这表明如果数据集足够多样,标准强化学习智能体也能在离线设置下表现良好;
1.2.2 算法
策略约束
显示策略约束
(类似于 TRPO): 估计行为策略 π β \pi_{\beta}πβ, 并约束目标策略 π θ \pi_{\theta}πθ 使其接近 于 π β \pi_{\beta}πβ 。最大化如下目标函数:
J ( π θ ) = E s ∼ d π θ ( s ) , a ∼ π θ ( a ∣ s ) [ Q π ( s , a ) ] J\left(\pi_{\theta}\right)=\mathbb{E}_{s \sim d^{\pi} \theta(s), a \sim \pi_{\theta}(a \mid s)}\left[Q^{\pi}(s, a)\right]J(πθ)=Es∼dπθ(s),a∼πθ(a∣s)[Qπ(s,a)]
s.t. D ( π θ ( ⋅ ∣ s ) , π ^ β ( ⋅ ∣ s ) ) ≤ ε \text { s.t. } D\left(\pi_{\theta}(\cdot \mid s), \hat{\pi}_{\beta}(\cdot \mid s)\right) \leq \varepsilon s.t. D(πθ(⋅∣s),π^β(⋅∣s))≤ε隐式策略约束
(类似于PPO): 不依赖于对行为策略 π β \pi_{\beta}πβ 的估计, 而是通过使用改进的目标函数和严格依赖 π β \pi_{\beta}πβ 的样本来隐式约束目标策略 π θ \pi_{\theta}πθ ,上述显式目标函数可以转化为:
L ( π , λ ) = E s ∼ d π β ( s ) [ E a ∼ π ( a ∣ s ) [ A ^ π ( s , a ) ] + λ ( ε − D K L ( π ( ⋅ ∣ s ) , π β ( ⋅ ∣ s ) ) ) ] \mathcal{L}(\pi, \lambda)=\mathbb{E}_{s \sim d^{\pi} \beta(s)}\left[\mathbb{E}_{a \sim \pi(a \mid s)}\left[\hat{A}^{\pi}(s, a)\right]+\lambda\left(\varepsilon-D_{K L}\left(\pi(\cdot \mid s), \pi_{\beta}(\cdot \mid s)\right)\right)\right]L(π,λ)=Es∼dπβ(s)[Ea∼π(a∣s)[A^π(s,a)]+λ(ε−DKL(π(⋅∣s),πβ(⋅∣s)))]- 对函数 π \piπ 求偏导使之为 0 , 可以得到: π ∗ ( a ∣ s ) ∝ π β ( a ∣ s ) exp ( λ − 1 A ^ π k ( s , a ) ) \pi^{*}(a \mid s) \propto \pi_{\beta}(a \mid s) \exp \left(\lambda^{-1} \hat{A}^{\pi_{k}}(s, a)\right)π∗(a∣s)∝πβ(a∣s)exp(λ−1A^πk(s,a))
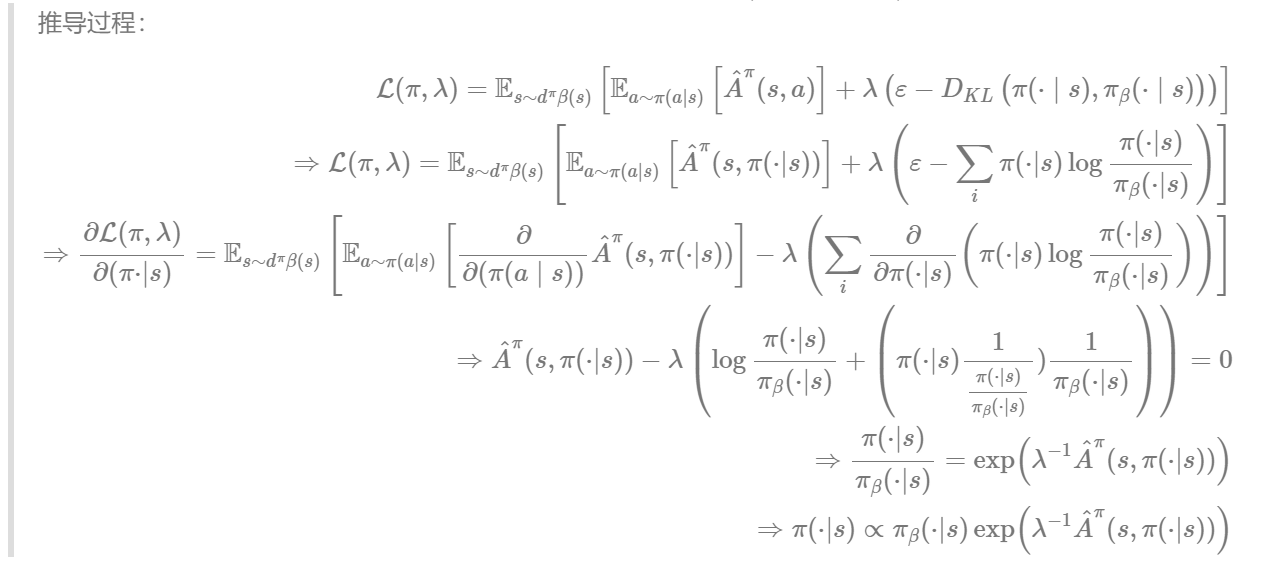
- 因此, 隐式目标函数改进为: (这里参见Advantage-Weighted Regression (AWR))
arg min π θ E s ∼ D [ D K L ( π ∗ ( ⋅ ∣ s ) , π θ ( ⋅ ∣ s ) ) ] = arg max π θ E s , a ∼ D [ log π θ ( a ∣ s ) exp ( λ − 1 A ^ π ( s , a ) ) ] \underset{\pi_{\theta}}{\arg \min } \mathbb{E}_{s \sim \mathcal{D}}\left[D_{K L}\left(\pi^{*}(\cdot \mid s), \pi_{\theta}(\cdot \mid s)\right)\right]=\underset{\pi_{\theta}}{\arg \max } \mathbb{E}_{s, a \sim \mathcal{D}}\left[\log \pi_{\theta}(a \mid s) \exp \left(\lambda^{-1} \hat{A}^{\pi}(s, a)\right)\right]πθargminEs∼D[DKL(π∗(⋅∣s),πθ(⋅∣s))]=πθargmaxEs,a∼D[logπθ(a∣s)exp(λ−1A^π(s,a))]
- 对函数 π \piπ 求偏导使之为 0 , 可以得到: π ∗ ( a ∣ s ) ∝ π β ( a ∣ s ) exp ( λ − 1 A ^ π k ( s , a ) ) \pi^{*}(a \mid s) \propto \pi_{\beta}(a \mid s) \exp \left(\lambda^{-1} \hat{A}^{\pi_{k}}(s, a)\right)π∗(a∣s)∝πβ(a∣s)exp(λ−1A^πk(s,a))
2 Extrapolation Error
错误的估计了状态动作值,本质上是经验池中的数据分布和当前策略的数据分布不一致,产生了分布偏移的情况。模型在一个分布下训练,但是在不同的分布下评估,如果经验池中缺少状态动作的样本,那么也就不可能学到策略。
2.1 Absent Data
某些s t a t e − a c t i o n state-actionstate−action对在数据集中不存在,那么这个动作的Q QQ值就无法更新。
2.2 Model Bias
模型自身存在的偏差,当我们用数据集B \mathcal{B}B训练模型时,B e l l m a n BellmanBellman算子( o p e r a t o r ) (operator)(operator)其实是通过从B \mathcal{B}B中采样轨迹( s , a , r , s ′ ) (s,a,r,s')(s,a,r,s′)来估计的,即
T π Q ( s , a ) ≈ E s ′ ∼ B [ r + γ Q ( s ′ , π ( s ′ ) ) ] \mathcal{T}^{\pi} Q(s, a) \approx \mathbb{E}_{s^{\prime} \sim \mathcal{B}}\left[r+\gamma Q\left(s^{\prime}, \pi\left(s^{\prime}\right)\right)\right]TπQ(s,a)≈Es′∼B[r+γQ(s′,π(s′))]
数据集B \mathcal{B}B的大小有限,s t a t e − a c t i o n state-actionstate−action的访问次数也是有限的,那么数据的分布就会产生偏差,关于s ′ s's′的期望就会有b i a s biasbias,因为在B \mathcal{B}B中采样s ′ s's′很难逼近真实MDP中s ′ s's′的分布。
2.3 Training Mismatch
当数据集B \mathcal{B}B中的数据量充足的时候,模型可以进行均匀采样,损失函数的权重是和轨迹似然相关的,于是损失函数是
≈ 1 ∣ B ∣ ∑ ( s , a , r , s ′ ) ∈ B ∥ r + γ Q θ ′ ( s ′ , π ( s ′ ) ) − Q θ ( s , a ) ∥ 2 \approx \frac{1}{|\mathcal{B}|} \sum_{\left(s, a, r, s^{\prime}\right) \in \mathcal{B}}\left\|r+\gamma Q_{\theta^{\prime}}\left(s^{\prime}, \pi\left(s^{\prime}\right)\right)-Q_{\theta}(s, a)\right\|^{2}≈∣B∣1(s,a,r,s′)∈B∑∥r+γQθ′(s′,π(s′))−Qθ(s,a)∥2
当数据集中的数据分布和当前策略下的数据分布不一致的时候,Q QQ函数对于当前策略选出的动作的值估计是很差的,因为此时均匀的权重1 ∣ B ∣ \frac{1}{|\mathcal{B}|}∣B∣1不再匹配当前策略下真实的权重。
而且当前策略下有高似然的s t a t e − a c t i o n state-actionstate−action对可能无法在数据集中找到,这样也会有误差。
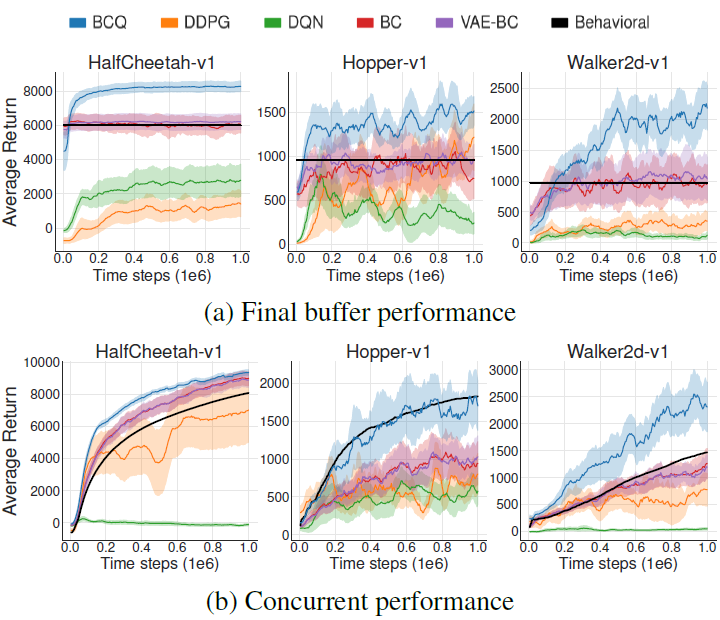
2.4 实验验证
2.4.1 Final buffer
从头训练一个DDPG算法,运行100万步(加入了高斯噪声来保证充分探索)并将遇到的轨迹全部储存在经验池,保证充分覆盖到所有的轨迹。
2.4.2 Concurrent
在Final buffer设置的基础上同时训练一个off-policy的智能体,并行训练100万步,俩个都用behavioral DDPG agent采样得到的经验池中的数据进行训练。
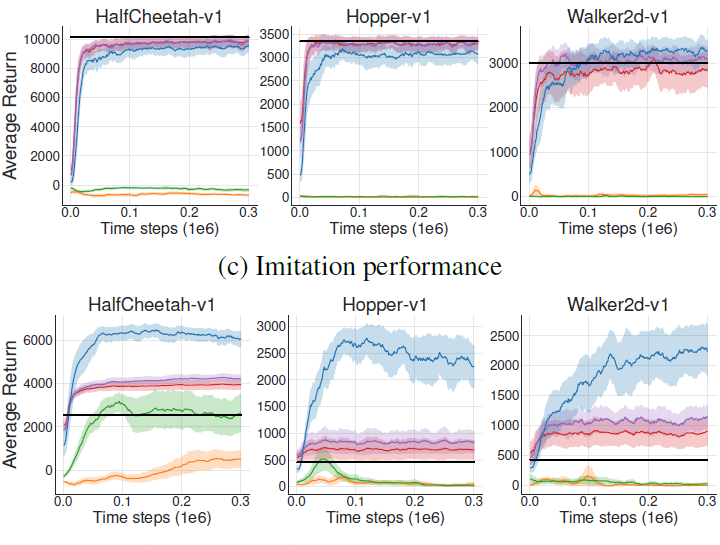
2.4.3 Imitation
使用一个训练好的DDPG从环境中采集100万步数据,没有探索。
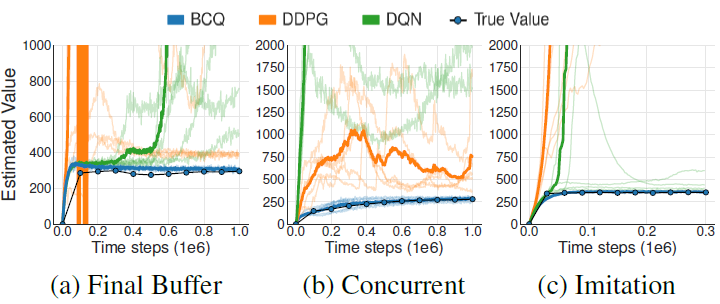
结果如图所示,其中True Value是用Monte Carlo算出来的。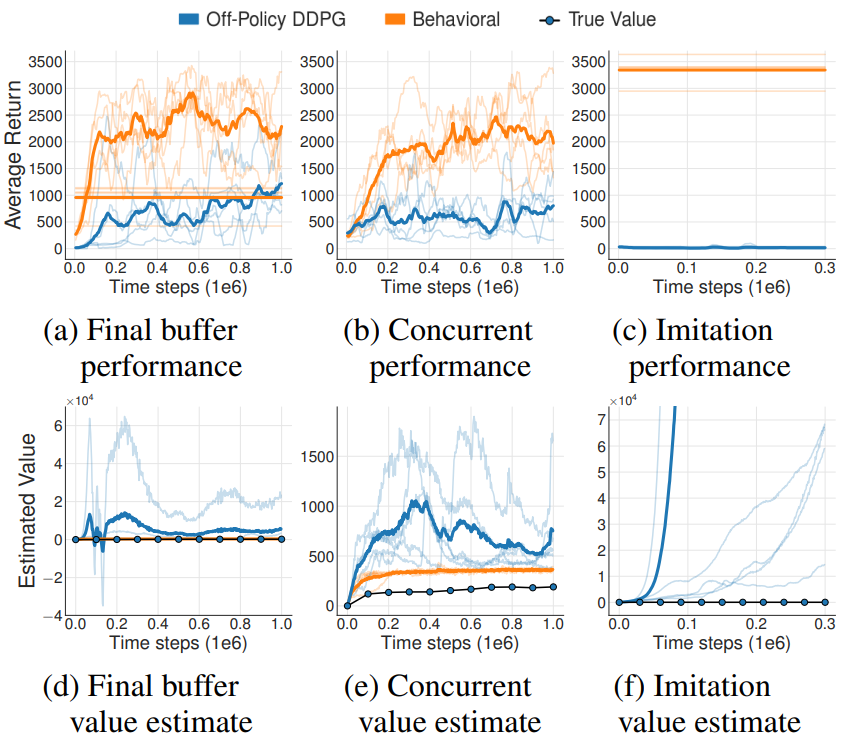
从图中可以看出,off-policy的DDPG的结果很差,即便和behavioral DDPG agent同时训练,也有很大的差距,这说明在稳定的状态分布下,初始策略的差异便可导致Extrapolation Error。而在imitation中,数据集中都是专家数据,在评估非专家的动作时,就会出现value的过估计问题。
on-line设置下,推断误差会导致过分估计,推测误差通过隐式的“乐观面对不确定性”策略可能促使有用的探索其值估计会慢慢修正。但是off-line是基于batch的,不能和环境进行交互,这样的误差将很难被消除。
3 策略约束
通过限制策略选择的s t a t e − a c t i o n state-actionstate−action对和b a t c h batchbatch中的存在的数据相似,那么动作的值估计就会变得准确了。
3.1策略选择的目标
- 最小化所选择的动作和数据集中存在的工作的距离
- 能转移到和数据集中状态相似的状态
- 最大化值函数
第一点最重要,通过限制所选择的动作,来增加值估计的准确性。增加了一个生成网络来限制动作之间的距离,再加上Q网络来选择最高价值的动作。为了评估相似状态,在价值更新时利用两个Q网络的估计再取soft minimum。
3.2 处理推测误差
Q值更新公式:
Q ( s , a ) ← ( 1 − α ) Q ( s , a ) + α ( r + γ Q ( s ′ , π ( s ′ ) ) ) Q(s, a) \leftarrow(1-\alpha) Q(s, a)+\alpha\left(r+\gamma Q\left(s^{\prime}, \pi\left(s^{\prime}\right)\right)\right)Q(s,a)←(1−α)Q(s,a)+α(r+γQ(s′,π(s′)))
其中π ( s ′ ) = argmax a ′ Q ( s ′ , a ′ ) \pi\left(s^{\prime}\right)=\operatorname{argmax}_{a^{\prime}} Q\left(s^{\prime}, a^{\prime}\right)π(s′)=argmaxa′Q(s′,a′),从数据集 B \mathcal{B}B 学习的 Q \mathrm{Q}Q 函数,定义一个对应的 M D P MDPMDP 为 M B M_{\mathcal{B}}MB,真实的 M D P MDPMDP 记为 M MM。M B M_{\mathcal{B}}MB 和 M MM 具有相同的动作空间和状态空间,初始状态为s i n i t s_{init}sinit,初始动作值是Q ( s , a ) Q(s,a)Q(s,a),M B M_{\mathcal{B}}MB的状态转移概率是p B ( s ′ ∣ s , a ) = N ( s , a , s ′ ) ∑ s ~ N ( s , a , s ) p_{\mathcal{B}}\left(s^{\prime} \mid s, a\right)=\frac{N\left(s, a, s^{\prime}\right)}{\sum_{\tilde{s} N(s, a, s)}}pB(s′∣s,a)=∑s~N(s,a,s)N(s,a,s′) ,其中 N ( s , a , s ′ ) N\left(s, a, s^{\prime}\right)N(s,a,s′) 表示在数据集 B \mathcal{B}B 遇见 N ( s , a , s ′ ) N\left(s, a, s^{\prime}\right)N(s,a,s′) 的数量。如果 ∑ s ~ N ( s , a , s ~ ) = 0 \sum_{\tilde{s}} N(s, a, \tilde{s})=0∑s~N(s,a,s~)=0 ,则 p B ( s i n i t ∣ s , a ) = 1 p_{\mathcal{B}}\left(s_{i n i t} \mid s, a\right)=1pB(sinit∣s,a)=1 ,并且 r ( s , a , s i n i t ) r\left(s, a, s_{i n i t}\right)r(s,a,sinit) 被设置为 Q ( s , a ) Q(s, a)Q(s,a) 的初始值。
3.2.2 定理1
从数据集B \mathcal{B}B中采样进行 Q − l e a r n i n g Q-learningQ−learning 学习,在 M D P MDPMDP M B M_{\mathcal{B}}MB中,Q − l e a r n i n g Q-learningQ−learning 最终会收敛到最优动作值函数。
ϵ M D P \epsilon_{\mathrm{MDP}}ϵMDP是有限MDP下的推测误差,也就是两个Q值的差:
ϵ M D P ( s , a ) = Q π ( s , a ) − Q B π ( s , a ) \epsilon_{\mathrm{MDP}}(s, a)=Q^{\pi}(s, a)-Q_{\mathcal{B}}^{\pi}(s, a)ϵMDP(s,a)=Qπ(s,a)−QBπ(s,a)
转换成贝尔方程的形式是:
ϵ M D P ( s , a ) = ∑ s ′ ( p M ( s ′ ∣ s , a ) − p B ( s ′ ∣ s , a ) ) ( r ( s , a , s ′ ) + γ ∑ a ′ π ( a ′ ∣ s ′ ) Q B π ( s ′ , a ′ ) ) + p M ( s ′ ∣ s , a ) γ ∑ a ′ π ( a ′ ∣ s ′ ) ϵ M D P ( s ′ , a ′ ) \begin{aligned} \epsilon_{\mathrm{MDP}}(s, a)=& \sum_{s^{\prime}}\left(p_{M}\left(s^{\prime} \mid s, a\right)-p_{\mathcal{B}}\left(s^{\prime} \mid s, a\right)\right) \\ &\left(r\left(s, a, s^{\prime}\right)+\gamma \sum_{a^{\prime}} \pi\left(a^{\prime} \mid s^{\prime}\right) Q_{\mathcal{B}}^{\pi}\left(s^{\prime}, a^{\prime}\right)\right) \\ &+p_{M}\left(s^{\prime} \mid s, a\right) \gamma \sum_{a^{\prime}} \pi\left(a^{\prime} \mid s^{\prime}\right) \epsilon_{\mathrm{MDP}}\left(s^{\prime}, a^{\prime}\right) \end{aligned}ϵMDP(s,a)=s′∑(pM(s′∣s,a)−pB(s′∣s,a))(r(s,a,s′)+γa′∑π(a′∣s′)QBπ(s′,a′))+pM(s′∣s,a)γa′∑π(a′∣s′)ϵMDP(s′,a′)
这意味推断误差可以视为转移概率的差值的函数,其中动作值视为权重。如果选择一个策略使得两个转移概率的差距最小,那么推断误差也能达到最小。
ϵ M D P π = ∑ s μ π ( s ) ∑ a π ( a ∣ s ) ∣ ϵ M D P ( s , a ) ∣ \epsilon_{\mathrm{MDP}}^{\pi}=\sum_{s} \mu_{\pi}(s) \sum_{a} \pi(a \mid s)\left|\epsilon_{\mathrm{MDP}}(s, a)\right|ϵMDPπ=s∑μπ(s)a∑π(a∣s)∣ϵMDP(s,a)∣
3.2.2 定理2
对于确定性的 MDP 和任意的奖励函数,当且仅当策略 π ππ 是batch-constrained时,ϵ M D P \epsilon_{\mathrm{MDP}}ϵMDP=0 。另外,如果数据集 B \mathcal{B}B 是连贯的,那么这样的策略一定存在,初始状态s 0 ∈ B s_{0} \in \mathcal{B}s0∈B 。
Q ( s , a ) ← ( 1 − α ) Q ( s , a ) + α ( r + γ max a ′ s.t. ( s ′ , a ′ ) ∈ B Q ( s ′ , a ′ ) ) Q(s, a) \leftarrow(1-\alpha) Q(s, a)+\alpha\left(r+\gamma \max _{a^{\prime} \text { s.t. }\left(s^{\prime}, a^{\prime}\right) \in \mathcal{B}} Q\left(s^{\prime}, a^{\prime}\right)\right)Q(s,a)←(1−α)Q(s,a)+α(r+γa′ s.t. (s′,a′)∈BmaxQ(s′,a′))
3.2.3 定理3
学习率为 α \alphaα,通过对环境标准的采样,BCQL 可以收敛到最优动作值函数 Q ∗ Q^{*}Q∗ 。
3.2.4 定理4
给定确定性 MDP 和 coherent 数据集 B \mathcal{B}B ,学习率为 α \alphaα,BCQL 将会收敛到 Q B π ( s , a ) Q_{\mathcal{B}}^{\pi}(s, a)QBπ(s,a) ,其中 π ∗ ( s ) = arg max a s.t. ( s , a ) ∈ B Q B π ( s , a ) \pi^{*}(s)=\arg \max _{a \text { s.t. }(s, a) \in \mathcal{B}} Q_{\mathcal{B}}^{\pi}(s, a)π∗(s)=argmaxa s.t. (s,a)∈BQBπ(s,a) 是最优 batch-constrained 策略。
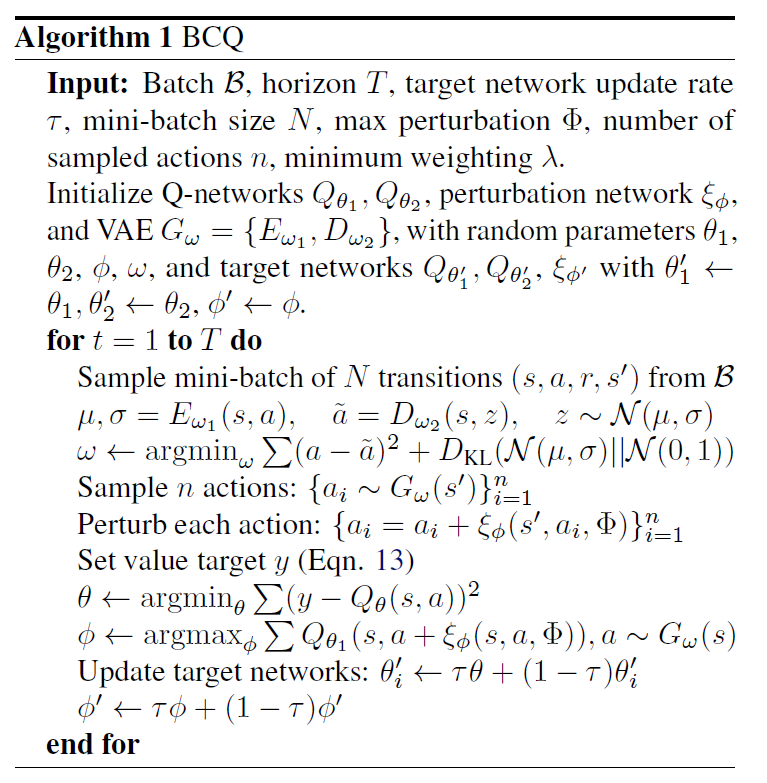
3.3 BCQ算法
将 BCQL 算法拓展到连续环境,本文提出了 BCQ 算法。其中为了满足 Batch-constrained 的条件,BCQ 利用了一个生成模型。对于给定的状态,BCQ 利用生成模型来生成与 batch 相似的动作集合,并通过 Q 网络来选择价值最高的动作。另外,还对价值估计过程增加了对未来稀有的状态进行惩罚,与 Clipped Double Q-learning 算法类似。最后,BCQ 能学到与数据集的状态动作对访问分布相似的策略。
给定状态 s ss ,将 ( s , a ) (s, a)(s,a) 和数据集 B \mathcal{B}B 中的状态动作对的相似度建模成条件概率 P B G ( a ∣ s ) P_{\mathcal{B}}^{G}(a \mid s)PBG(a∣s) 。为了估计 P B G ( a ∣ s ) P_{\mathcal{B}}^{G}(a \mid s)PBG(a∣s) ,采用参数化的生成模型 G ω ( s ) G_{\omega}(s)Gω(s) ,从中采样动作来逼近 arg max a P B G ( a ∣ s ) \arg \max _{a} P_{\mathcal{B}}^{G}(a \mid s)argmaxaPBG(a∣s) 。
使用变分自动编码器 V A E VAEVAE 来提高生成动作的多样性,引入扰动模型 ξ ϕ ( s , a , Φ ) \xi_{\phi}(s, a, \Phi)ξϕ(s,a,Φ) ,对动作 a aa 的扰动范围是 [ − Φ , Φ ] [-\Phi, \Phi][−Φ,Φ] 。此时策略可 以表示为:
π ( s ) = arg max a i + ξ ϕ ( s , a i , Φ ) Q θ ( s , a i + ξ ϕ ( s , a i , Φ ) ) , { a i ∼ G ω ( s ) } i = 1 n \pi(s)=\arg \max _{a_{i}+\xi_{\phi}\left(s, a_{i}, \Phi\right)} Q_{\theta}\left(s, a_{i}+\xi_{\phi}\left(s, a_{i}, \Phi\right)\right), \quad\left\{a_{i} \sim G_{\omega}(s)\right\}_{i=1}^{n}π(s)=argai+ξϕ(s,ai,Φ)maxQθ(s,ai+ξϕ(s,ai,Φ)),{ai∼Gω(s)}i=1n
参数 n nn 和 Φ \PhiΦ 的选择让 BCQ 算法介于模仿学习和强化学习之间。当 Φ = 0 \Phi=0Φ=0 且 n = 1 n=1n=1 时,BCQ 就类似于模仿学习;当 Φ = a max − a min \Phi=a_{\max }-a_{\min }Φ=amax−amin 且 n → ∞ n \rightarrow \inftyn→∞ 时,BCQ 算法就类似于 Q-learning 算法。
扰动模型 ξ ϕ \xi_{\phi}ξϕ 的训练和 DDPG 算法的训练目标类似:
ϕ ← arg max ϕ ∑ ( s , a ) ∈ B Q θ ( s , a + ξ ϕ ( s , a , Φ ) ) \phi \leftarrow \underset{\phi}{\arg \max } \sum_{(s, a) \in \mathcal{B}} Q_{\theta}\left(s, a+\xi_{\phi}(s, a, \Phi)\right)ϕ←ϕargmax(s,a)∈B∑Qθ(s,a+ξϕ(s,a,Φ))
为了对末来一些不常见的状态进行惩罚,采用 Clipped Double Q-learning 算法 对动作值 Q QQ 进行估计,也就是训练两个动作值网络 { Q θ 1 , Q θ 2 } \left\{Q_{\theta_{1}}, Q_{\theta_{2}}\right\}{Qθ1,Qθ2} ,取它们的最小值作为动作值的估计。改进 Clipped Double Q-learning 算法,对两个动作值采用新的结合方式:
y = r + γ max a i [ λ min j = 1 , 2 Q θ j ′ ( s ′ , a i ) + ( 1 − λ ) max j = 1 , 2 Q θ j ′ ( s ′ , a i ) ] y=r+\gamma \max _{a_{i}}\left[\lambda \min _{j=1,2} Q_{\theta_{j}^{\prime}}\left(s^{\prime}, a_{i}\right)+(1-\lambda) \max _{j=1,2} Q_{\theta_{j}^{\prime}}\left(s^{\prime}, a_{i}\right)\right]y=r+γaimax[λj=1,2minQθj′(s′,ai)+(1−λ)j=1,2maxQθj′(s′,ai)]
class BCQ(object):
def __init__(self, state_dim, action_dim, max_action, device, discount=0.99, tau=0.005, lmbda=0.75, phi=0.05):
latent_dim = action_dim * 2
self.actor = Actor(state_dim, action_dim, max_action, phi).to(device)
self.actor_target = copy.deepcopy(self.actor)
self.actor_optimizer = torch.optim.Adam(self.actor.parameters(), lr=1e-3)
self.critic = Critic(state_dim, action_dim).to(device)
self.critic_target = copy.deepcopy(self.critic)
self.critic_optimizer = torch.optim.Adam(self.critic.parameters(), lr=1e-3)
self.vae = VAE(state_dim, action_dim, latent_dim, max_action, device).to(device)
self.vae_optimizer = torch.optim.Adam(self.vae.parameters())
self.max_action = max_action
self.action_dim = action_dim
self.discount = discount
self.tau = tau
self.lmbda = lmbda
self.device = device
def select_action(self, state):
with torch.no_grad():
state = torch.FloatTensor(state.reshape(1, -1)).repeat(100, 1).to(self.device)
action = self.actor(state, self.vae.decode(state))
q1 = self.critic.q1(state, action)
ind = q1.argmax(0)
return action[ind].cpu().data.numpy().flatten()
def train(self, replay_buffer, iterations, batch_size=100):
for it in range(iterations):
# Sample replay buffer / batch
state, action, next_state, reward, not_done = replay_buffer.sample(batch_size)
# Variational Auto-Encoder Training
recon, mean, std = self.vae(state, action)
recon_loss = F.mse_loss(recon, action)
KL_loss = -0.5 * (1 + torch.log(std.pow(2)) - mean.pow(2) - std.pow(2)).mean()
vae_loss = recon_loss + 0.5 * KL_loss
self.vae_optimizer.zero_grad()
vae_loss.backward()
self.vae_optimizer.step()
# Critic Training
with torch.no_grad():
# Duplicate next state 10 times
next_state = torch.repeat_interleave(next_state, 10, 0)
# Compute value of perturbed actions sampled from the VAE
target_Q1, target_Q2 = self.critic_target(next_state, self.actor_target(next_state, self.vae.decode(next_state)))
# Soft Clipped Double Q-learning
target_Q = self.lmbda * torch.min(target_Q1, target_Q2) + (1. - self.lmbda) * torch.max(target_Q1, target_Q2)
# Take max over each action sampled from the VAE
target_Q = target_Q.reshape(batch_size, -1).max(1)[0].reshape(-1, 1)
target_Q = reward + not_done * self.discount * target_Q
current_Q1, current_Q2 = self.critic(state, action)
critic_loss = F.mse_loss(current_Q1, target_Q) + F.mse_loss(current_Q2, target_Q)
self.critic_optimizer.zero_grad()
critic_loss.backward()
self.critic_optimizer.step()
# Pertubation Model / Action Training
sampled_actions = self.vae.decode(state)
perturbed_actions = self.actor(state, sampled_actions)
# Update through DPG
actor_loss = -self.critic.q1(state, perturbed_actions).mean()
self.actor_optimizer.zero_grad()
actor_loss.backward()
self.actor_optimizer.step()
# Update Target Networks
for param, target_param in zip(self.critic.parameters(), self.critic_target.parameters()):
target_param.data.copy_(self.tau * param.data + (1 - self.tau) * target_param.data)
for param, target_param in zip(self.actor.parameters(), self.actor_target.parameters()):
target_param.data.copy_(self.tau * param.data + (1 - self.tau) * target_param.data)
4 实验结果
如下图所示,BCQ的值估计准确而且稳定,这说明推测误差得到了很好的解决。BCQ可以从不好的数据示例中进行学习,并可以超过示例,此外,相较于一般的DRL算法,BCQ需要的迭代次数很少。
参考文献
[1]. John Schulman, Sergey Levine, Philipp Moritz, Michael I. Jordan, Pieter Abbeel: “Trust Region Policy Optimization”, 2015; arXiv:1502.05477.
[2]. Scott Fujimoto, David Meger, Doina Precup: “Off-Policy Deep Reinforcement Learning without Exploration”, 2018; arXiv:1812.02900.
[3]. Scott Fujimoto, Edoardo Conti, Mohammad Ghavamzadeh, Joelle Pineau: “Benchmarking Batch Deep Reinforcement Learning Algorithms”, 2019; arXiv:1910.01708.
[4].batch constrained deep Q-learning- 张楚珩,2020
[5]. 离线强化学习(A Survey on Offline Reinforcement Learning)
[6]. Batch RL与BCQ算法