
threshold = 0.1
part = 1
probMap = output[0, part, :,:]
mapSmooth = cv2.GaussianBlur(probMap, (3, 3), 0, 0)
mapMask = np.uint8(mapSmooth > threshold)
plt.subplot(1, 3, 1)
plt.imshow(probMap)
plt.title("probMap")
plt.axis("off")
plt.subplot(1, 3, 2)
plt.imshow(mapSmooth)
plt.title("mapSmooth")
plt.axis("off")
plt.subplot(1, 3, 3)
plt.imshow(mapMask)
plt.title("mapMask")
plt.axis("off")
plt.show()一,关键点检测
流程如下:probmap->高斯滤波->得到mapMask
1.cv2.GaussianBlur:高斯滤波,是一种线性平滑滤波,对于除去高斯噪声有很好的效果。
2.mapMask为prob二值图,>threshold为1,其他为0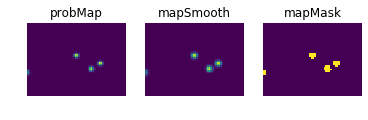
二,关键点坐标值
为了找到关键点的确切位置,我们需要找到每个blob的极大值。通过以下步骤实现:
1.首先找出每个关键点区域的全部轮廓
2.生成这个区域的遮盖(blob mask)
3.通过用probMap乘以这个遮盖,提取该区域的probMap
4.找到这个区域的本地极大值。要对每个轮廓(即关键点区域)进行处理。
threshold = 0.1
part = 1
probMap = output[0, part, :,:]
probMap = cv2.resize(probMap, (img_cv2.shape[1], img_cv2.shape[0]))
mapSmooth = cv2.GaussianBlur(probMap, (3, 3), 0, 0)
mapMask = np.uint8(mapSmooth > threshold)
keypoints = []
#找出每个关键点区域的全部轮廓
contours, hierarchy = cv2.findContours(mapMask, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
for cnt in contours:
blobMask = np.zeros(mapMask.shape)
blobMask = cv2.fillConvexPoly(blobMask, cnt, 1)
maskedProbMap = mapSmooth * blobMask
_, maxVal, _, maxLoc = cv2.minMaxLoc(maskedProbMap)
keypoints.append(maxLoc + (probMap[maxLoc[1], maxLoc[0]],))
img_cv2_copy = img_cv2.copy()
for keypoint in keypoints:
cv2.circle(img_cv2_copy, (keypoint[0], keypoint[1]), 5, (255, 0, 0), -1, cv2.LINE_AA)
plt.figure()
plt.imshow(img_cv2_copy[:, :, ::-1])
plt.title("Keypoints")
plt.axis("off")
plt.show()
三,关键点对的检测
[1] - 将关键点对的两个点之间的连线进行划分,得到该连线上的 n 个点(Divide the line joining the two points comprising the pair. Find n points on this line.);
[2] - 判断这些点上的 PAF 是否与连接该关键点的线的方向相同(Check if the PAF on these points have the same direction as that of the line joining the points for this pair);
[3] - 如果方向满足特定程度,则为有效的关键点对(If the direction matches to a certain extent, then it is valid pair.)
# Find valid connections between the different
# joints of a all persons present
def getValidPairs(output):
valid_pairs = []
invalid_pairs = []
n_interp_samples = 10
paf_score_th = 0.1
conf_th = 0.7
# loop for every POSE_PAIR
for k in range(len(mapIdx)):
# A->B constitute a limb
pafA = output[0, mapIdx[k][0], :, :]
pafB = output[0, mapIdx[k][1], :, :]
pafA = cv2.resize(pafA, (imgWidth, imgHeight))
pafB = cv2.resize(pafB, (imgWidth, imgHeight))
# 检测第一个 limb 和第二个 limb 的关键点位置
candA = detected_keypoints[POSE_PAIRS[k][0]]
candB = detected_keypoints[POSE_PAIRS[k][1]]
nA = len(candA)
nB = len(candB)
# 如果检测到 joint-pair 的关键点位置,则,
# 检查 candA 和 candB 中每个 joint.
# 计算两个 joints 之间的距离向量(distance vector).
# 计算两个 joints 之间插值点集合的 PAF 值.
# 根据上述公式,计算 score 值,判断连接的有效性.
if (nA != 0 and nB != 0):
valid_pair = np.zeros((0, 3))
for i in range(nA):
max_j = -1
maxScore = -1
found = 0
for j in range(nB):
# Find d_ij
d_ij = np.subtract(candB[j][:2], candA[i][:2])
norm = np.linalg.norm(d_ij)
if norm:
d_ij = d_ij / norm
else:
continue
# Find p(u)
interp_coord = list(
zip(np.linspace(candA[i][0],
candB[j][0],
num=n_interp_samples),
np.linspace(candA[i][1],
candB[j][1],
num=n_interp_samples)))
# Find L(p(u))
paf_interp = []
for k in range(len(interp_coord)):
paf_interp.append(
[pafA[int(round(interp_coord[k][1])),
int(round(interp_coord[k][0]))],
pafB[int(round(interp_coord[k][1])),
int(round(interp_coord[k][0]))]
])
# Find E
paf_scores = np.dot(paf_interp, d_ij)
avg_paf_score = sum(paf_scores) / len(paf_scores)
# 判断连接是否有效.
# 如果对应于 PAF 的插值向量值大于阈值,则连接有效.
if (len(np.where(paf_scores > paf_score_th)[0]) /
n_interp_samples) > conf_th:
if avg_paf_score > maxScore:
max_j = j
maxScore = avg_paf_score
found = 1
# Append the connection to the list
if found:
valid_pair = np.append(
valid_pair,
[[candA[i][3], candB[max_j][3], maxScore]],
axis=0)
# Append the detected connections to the global list
valid_pairs.append(valid_pair)
else: # If no keypoints are detected
print("No Connection : k = {}".format(k))
invalid_pairs.append(k)
valid_pairs.append([])
print(valid_pairs)
return valid_pairs, invalid_pairs[1] - 选择属于同一个关键点对的关键点. 并分别存放在两个列表: candA 和 candB. candA 列表中的每个关键点可以与 candB 中的某些关键点相连接
[2] - 计算两个关键点之间的单位向量,其给定了关节点之间连线的方向.
[3] - 计算两个关键点之间连线的 10 个插值点.
[4] - 计算插值点的 PAF 与单位向量 d_ij 之间的点积(dot product).
[5] - 如果这些插值点的 70% 的都满足判定标准,则该关键点对是有效的.
四.关键点组合的具体实现分析
对于每个检测到的有效 joint pair,分配属于一个人体的 joints
[1] - 首先创建保存每个人体的所有关键点的空列表.
[2] - 如果 partA 不在任一人体列表里,则表示该关键点对属于一个新出现的人体,故创建新的列表.
def getPersonwiseKeypoints(valid_pairs, invalid_pairs):
# 每一行的最后一个值为 overall score.
personwiseKeypoints = -1 * np.ones((0, 19))
for k in range(len(mapIdx)):
if k not in invalid_pairs:
partAs = valid_pairs[k][:,0]
partBs = valid_pairs[k][:,1]
indexA, indexB = np.array(POSE_PAIRS[k])
for i in range(len(valid_pairs[k])):
found = 0
person_idx = -1
for j in range(len(personwiseKeypoints)):
if personwiseKeypoints[j][indexA] == partAs[i]:
person_idx = j
found = 1
break
if found:
personwiseKeypoints[person_idx][indexB] = partBs[i]
personwiseKeypoints[person_idx][-1] +=
keypoints_list[partBs[i].astype(int), 2] +
valid_pairs[k][i][2]
# if find no partA in the subset, create a new subset
elif not found and k < 17:
row = -1 * np.ones(19)
row[indexA] = partAs[i]
row[indexB] = partBs[i]
# add the keypoint_scores for the two keypoints and the paf_score
row[-1] = sum(
keypoints_list[valid_pairs[k][i,:2].astype(int), 2])
+ valid_pairs[k][i][2]
personwiseKeypoints = np.vstack([personwiseKeypoints, row])
return personwiseKeypoints```python