1. IMU的简单介绍
- IMU(Inertial measurement unit)中文名叫惯性测量单元。
- 可以测量两个东西,加速度 a aa 是沿三个轴a x , a y , a z a_x,a_y,a_zax,ay,az方向的线加速度;角速度w ww就是这三个方向的角速度w x , w y , w z w_x,w_y,w_zwx,wy,wz.
- IMU的频率比较高,一般都在100HZ以上。
- 在IMU内部,除了通常的白噪声,还有个特别的量零偏bias,在这是传感器内部机械、温度等各种物理因素产生的传感器内部误差的综合参数。
2. IMU的状态PVQ
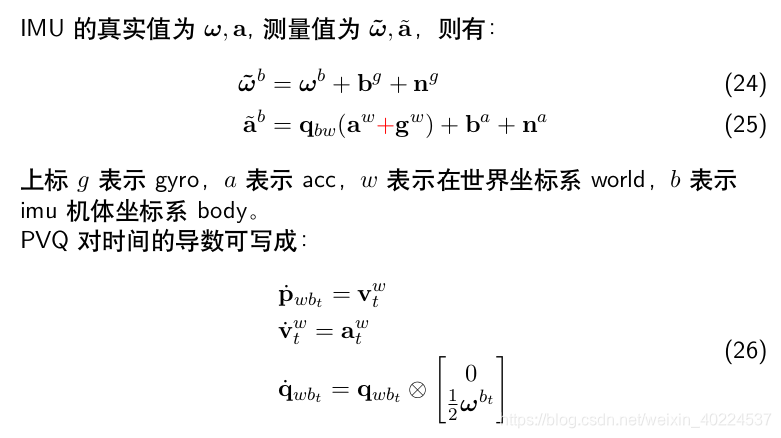
IMU每个时刻可实现自身主体加速度 a aa 和角速度 w ww 的测量,那么有测量模型:
可以从第i ii时刻的PVQ,通过对IMU的测试值进行积分,得到第j jj时刻的PVQ: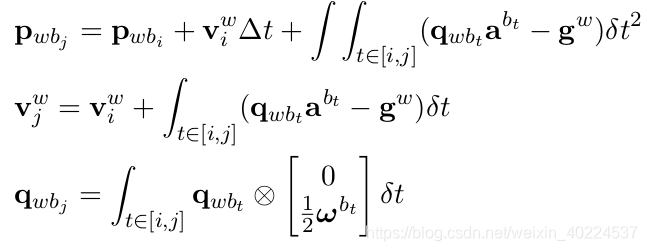
3. IMU预积分
3.1 推导
问题: 每次 q w b t q _{wb_t}qwbt 优化更新后,都需要重新进行积分,运算量较大。
解决办法:
通过下面的公式转换,可以将积分模型转为预积分模型: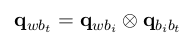
那么,PVQ 积分公式中的积分项则变成相对于第 i 时刻的姿态,而不是相对于世界坐标系的姿态:
预积分量仅仅跟 IMU 测量值有关,它将一段时间内的 IMU 数据直接积分起来就得到了预积分量:

重新整理 PVQ 的积分公式得:

这里有一个前提假设,就是我们认为零偏 b i b_ibi是已知的,即:
3.2 预积分的离散形式
使用中值法,即两个相邻时刻 k 到 k+1 的位姿是用两个时刻的测量值 a, ω 的平均值来计算: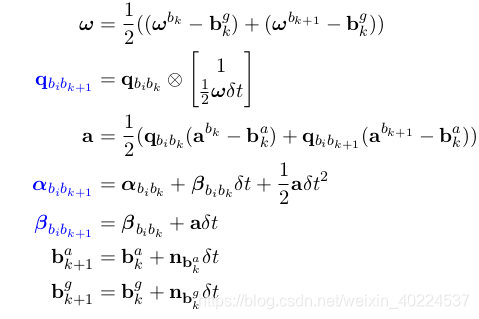
4. IMU的预积分误差
定义: 一段时间内IMU 构建的预积分量作为测量值,对两时刻之间的状态量进行约束,

5. 预积分量的协方差
eg.
所以,要推导预积分量的协方差,我们需要知道 imu 噪声和预积分量之间的线性递推关系。
假设相邻时刻误差的线性传递方程如下,误差的传递由两部分组成:当前时刻的误差传递给下一时刻,当前时刻测量噪声传递给下一时刻:

协方差矩阵可以通过递推计算得到:
其中,Σ n Σ nΣn 是测量噪声的协方差矩阵,方差从 i 时刻开始进行递推,Σ i i Σ iiΣii = 0。
6. 状态误差线性递推公式推导_基于一阶泰勒展开
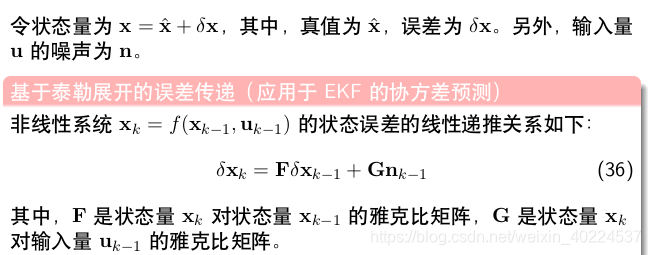
得到预积分误差传递的形式, 表示k+1时刻body系下,预积分的真实值与估计值之间的差异值。
表示k+1时刻body系下,预积分的真实值与估计值之间的差异值。
F和G为两个时刻间的协方差传递矩阵,具体为: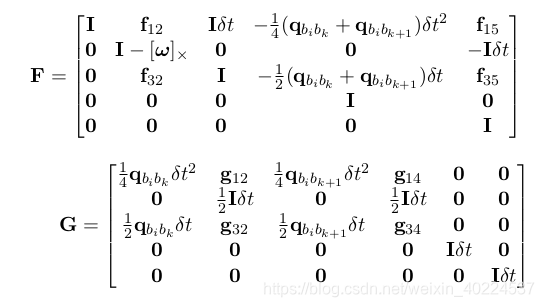
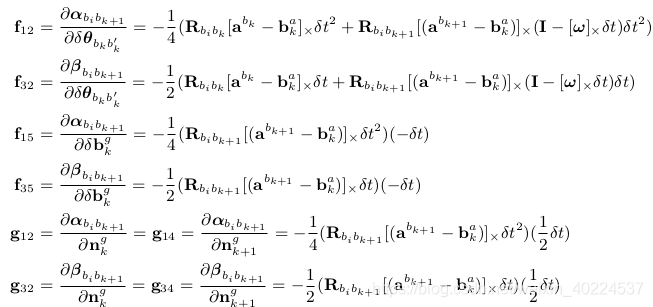
其中的系数为,
版权声明:本文为weixin_40224537原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。