1. 前言
随着自动驾驶的发展,现代汽车的智能化程度逐步提高,基于视觉系统的自动驾驶也逐步趋于稳定——特斯拉、Mobileye、CommaAI等机构起着推波助澜的作用。
自动驾驶场景或者Adas场景中,当检测出前方车辆后通常需要进行距离估计,为车辆控制提供距离参考信息;而基于视觉的移动机器人也存在该需求。单目摄像头光学图像测距具有低成本和计算快的优点,主要有两种常用的测距方式1。
- 使用目标物体大小和摄像头焦距
- 使用摄像头高度和俯仰角
本文将介绍第二种测距方式。
2. 几何关系示意图
该部分直接引用自参考文献2
投影关系图和投影平面2如下所示,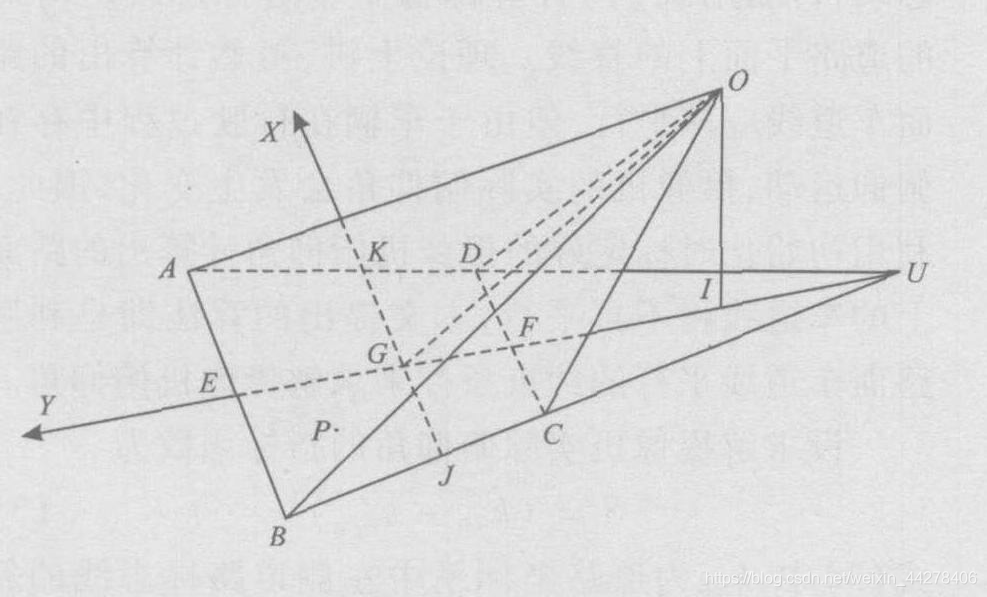
平面A B U ABUABU代表路平面,A B C D ABCDABCD为摄像头拍摄到的路平面上的梯形区域,O OO为摄像机O OO点为摄像机镜头中心点,O G OGOG为摄像机光轴,G GG 点为摄像机光轴和路平面的交点(同时也是视野梯形的对角线交点),I II点为O OO点在路平面上的垂直投影。在路面坐标系中, 将G GG点定义为坐标系原点,,车辆前进方向定义为Y YY轴方向。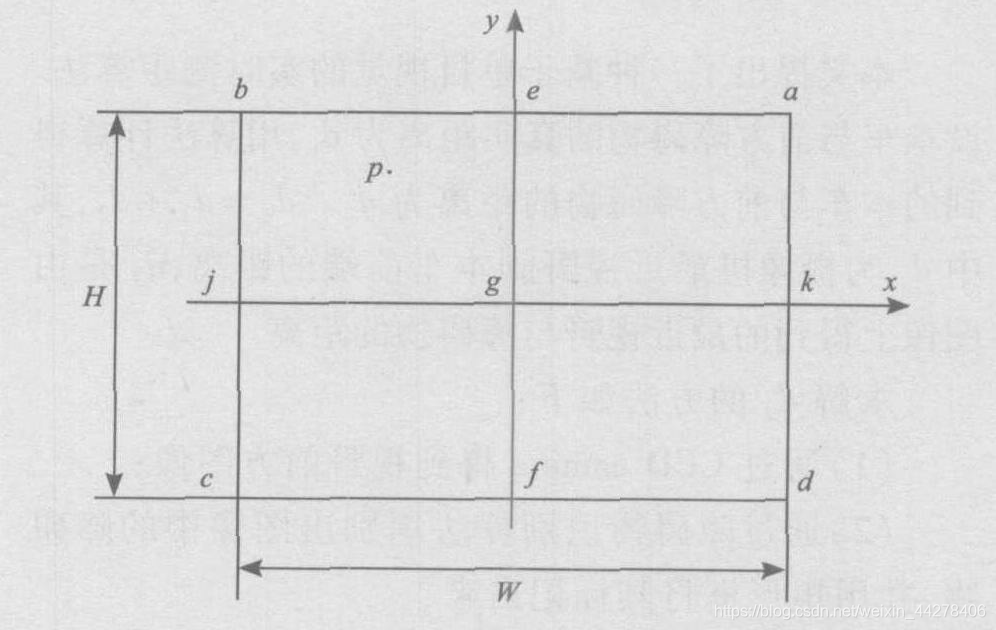
G 、 A 、 B 、 C 、 D G、A、B 、C、DG、A、B、C、D 各点在图像平面内的对应点上图所示,a 、 b 、 c 、 d a、b、c、da、b、c、d为像平面矩形的4个端点,H HH和W WW分别为像平面的高和宽。定义图像矩形的中点g gg为像平面坐标系的坐标原点,y 轴代表车辆前进方向。
取路面上一点P PP,其在路平面坐标系的坐标为( X P , Y P ) (X_P, Y_P)(XP,YP),P PP点在图像平面内的对应点为p pp, 其在像平面坐标系的坐标为( x p , y p ) (x_p, y_p)(xp,yp)。
3. 距离计算
3.1 参数
- 摄像头高度h hh
- 摄像头水平视场角2 β 0 2\beta_02β0
- 摄像头垂直视场角2 α 0 2\alpha_02α0
- 摄像头俯仰角γ 0 \gamma_0γ0
相关概念请参见博客:相机焦距与视场角
3.2 Y轴方向的成像模型2
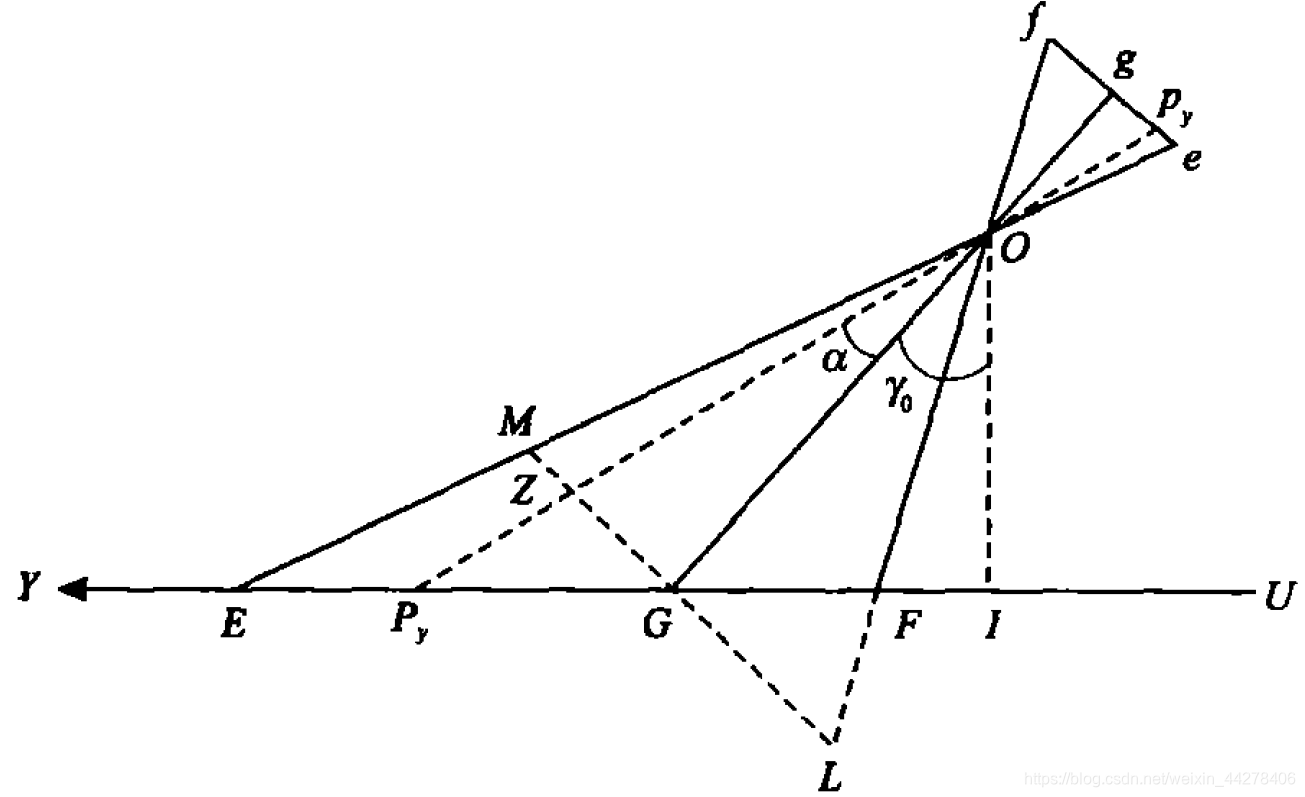
摄像头光轴(O G OGOG)所在的与路面相垂直的平面为O E I OEIOEI。图中各字符与几何关系示意图中对应字符含义相同。直线M L MLML与直线O G OGOG垂直,与直线f F fFfF的延长线相交于点L LL。点p y p_ypy表示像平面上的点p pp在直线e f efef上的投影(y yy轴方向),P y P_yPy点是路面上的点P PP在视野纵向对称线上的投影,Z是直线p y P y p_yP_ypyPy与直线线 M L 线ML线ML的交点。
根据三角函数关系和相似三角形可得,
tan α = Z G G O tan α 0 = M G G O Z G M G = p y g e g \begin{aligned} \tan\alpha &= \frac{ZG}{GO} \\ \tan\alpha_0 &= \frac{MG}{GO} \\ \frac{ZG}{MG} &= \frac{p_yg}{eg} \end{aligned}tanαtanα0MGZG=GOZG=GOMG=egpyg
所以,
tan α = p y g e g ∗ tan α 0 = p y g H / 2 ∗ tan α 0 = y H / 2 ∗ tan α 0 \begin{aligned} \tan\alpha &= \frac{p_yg}{eg}*\tan\alpha_0\\ &=\frac{p_yg}{H/2}*\tan\alpha_0\\ &=\frac{y}{H/2}*\tan\alpha_0 \end{aligned}tanα=egpyg∗tanα0=H/2pyg∗tanα0=H/2y∗tanα0
那么,
P y I = O I tan ( 9 0 ∘ − α − γ 0 ) = h tan ( 9 0 ∘ − α − γ 0 ) \begin{aligned} P_yI &= \frac{OI}{\tan(90^{\circ}-\alpha-\gamma_0)}\\ &= \frac{h}{\tan(90^{\circ}-\alpha-\gamma_0)} \end{aligned}PyI=tan(90∘−α−γ0)OI=tan(90∘−α−γ0)h
注:计算角度α = arctan ( y H / 2 ∗ tan α 0 ) \alpha = \arctan(\frac{y}{H/2}*\tan\alpha_0)α=arctan(H/2y∗tanα0)时,y为空间点在投影面上的y轴坐标,是有符号的,H为图像高度。
3.3 X轴方向的成像模型
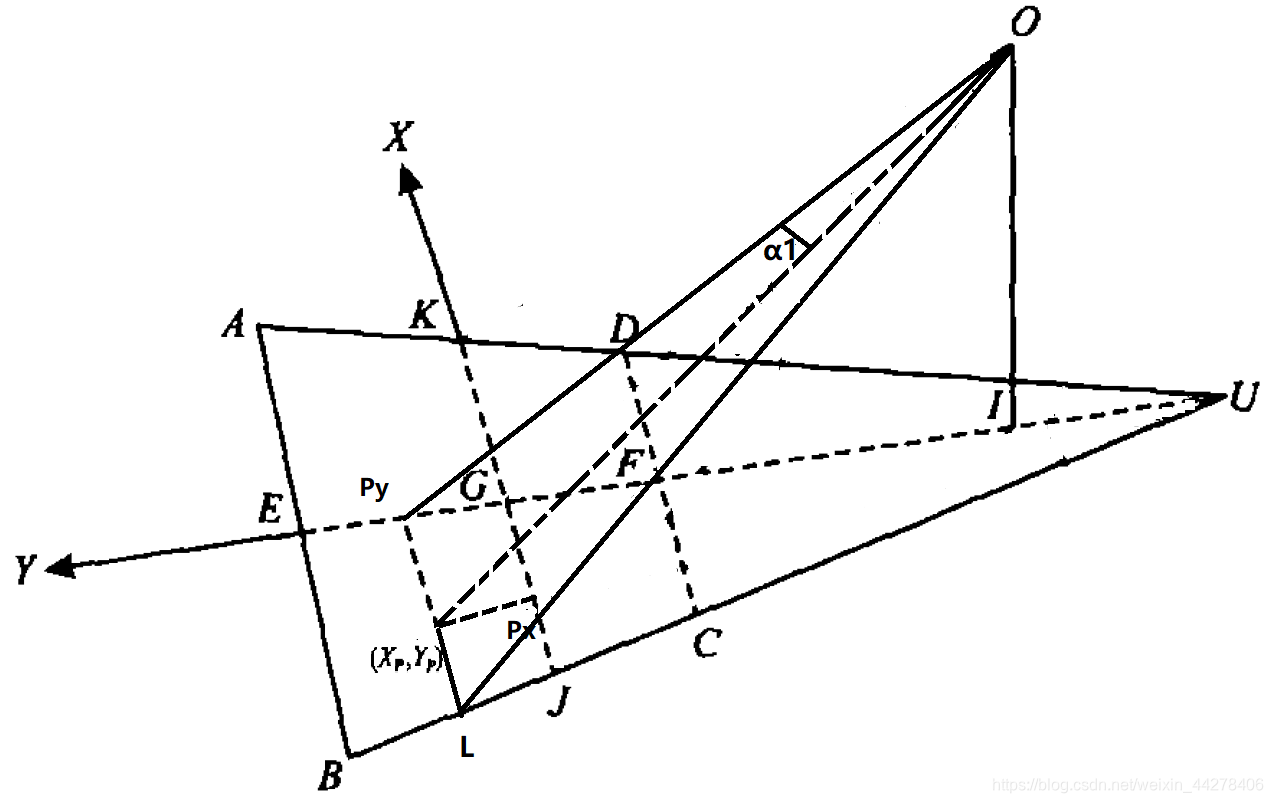
P x PxPx为点P在X轴上的投影点,
在三角形Δ O P y L \Delta OP_yLΔOPyL中,
tan α 1 = P y P O P y = ∣ X p ∣ O P y = ∣ X p ∣ h 2 + P y I 2 \begin{aligned} \tan \alpha_1 &=\frac{P_yP}{OP_y} \\ &= \frac{|X_p|}{OP_y}\\ &= \frac{|X_p|}{\sqrt{h^2+P_yI^2}} \end{aligned}tanα1=OPyPyP=OPy∣Xp∣=h2+PyI2∣Xp∣
根据P点成像的相似三角形可得,
O P y tan α 1 O P y tan β 0 = x W / 2 \begin{aligned} \frac{OP_y\tan\alpha_1}{OP_y\tan\beta_0} &=\frac{x}{W/2} \\ \end{aligned}OPytanβ0OPytanα1=W/2x
综上,
∣ X p ∣ = h 2 + P y I 2 ∗ x ∗ tan β 0 W / 2 |X_p| = \frac{\sqrt{h^2+P_yI^2} *x *\tan\beta_0}{W/2}∣Xp∣=W/2h2+PyI2∗x∗tanβ0
x为空间点在投影面上的x轴坐标
4. Show me the code
代码很简单,后续补充上来。
Reference
Alizadeh, Peyman. Object distance measurement using a single camera for robotic applications. Diss. Laurentian University of Sudbury, 2015. ↩︎
郭磊, 徐友春, 李克强, & 连小珉. (2006). 基于单目视觉的实时测距方法研究 (Doctoral dissertation). ↩︎ ↩︎