import datetime
import torch
import torchvision.models
from torchvision import datasets
from torchvision import transforms as T
from torch.utils.data import DataLoader
import torch.nn as nn
import torch.optim as optim
import matplotlib.pyplot as plt
from PIL import Image
import xml.etree.ElementTree as ET
import os
import torch.nn.functional as F
# AlexNet
class AlexNet(nn.Module):
def __init__(self, num_classes=1000, init_weights=False):
super(AlexNet, self).__init__()
self.features = nn.Sequential(
nn.Conv2d(3, 48, kernel_size=11, stride=4, padding=2),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Conv2d(48, 128, kernel_size=5, padding=2),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Conv2d(128, 192, kernel_size=3, padding=1),
nn.ReLU(inplace=True),
nn.Conv2d(192, 192, kernel_size=3, padding=1),
nn.ReLU(inplace=True),
nn.Conv2d(192, 128, kernel_size=3, padding=1),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2),
)
self.classifier = nn.Sequential(
nn.Dropout(p=0.5),
nn.Linear(128 * 6 * 6, 2048),
nn.ReLU(inplace=True),
nn.Dropout(p=0.5),
nn.Linear(2048, 2048),
nn.ReLU(inplace=True),
nn.Linear(2048, num_classes)
)
if init_weights:
self._initialize_weights()
def forward(self, x):
x = self.features(x)
x = torch.flatten(x, start_dim=1)
x = self.classifier(x)
return x
def _initialize_weights(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu') # 何教授方法
if m.bias is not None:
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.Linear):
nn.init.normal_(m.weight, 0, 0.01) # 正态分布赋值
nn.init.constant_(m.bias, 0)
# VGG16
class VGG16(nn.Module):
def __init__(self, num_classes=1000, init_weights=False):
super(VGG16, self).__init__()
self.layer1 = nn.Sequential(
nn.Conv2d(in_channels=3, out_channels=64, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=64, out_channels=64, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=2, stride=2)
)
self.layer2 = nn.Sequential(
nn.Conv2d(in_channels=64, out_channels=128, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(128),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=128, out_channels=128, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(128),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=2, stride=2)
)
self.layer3 = nn.Sequential(
nn.Conv2d(in_channels=128, out_channels=256, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(256),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=256, out_channels=256, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(256),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=256, out_channels=256, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(256),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=2, stride=2)
)
self.layer4 = nn.Sequential(
nn.Conv2d(in_channels=256, out_channels=512, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(512),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=512, out_channels=512, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(512),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=512, out_channels=512, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(512),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=2, stride=2)
)
self.layer5 = nn.Sequential(
nn.Conv2d(in_channels=512, out_channels=512, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(512),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=512, out_channels=512, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(512),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=512, out_channels=512, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(512),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=2, stride=2)
)
self.conv = nn.Sequential(
self.layer1,
self.layer2,
self.layer3,
self.layer4,
self.layer5
)
self.fc = nn.Sequential(
nn.Linear(512 * 7 * 7, 4096),
nn.ReLU(inplace=True),
nn.Dropout(0.5),
nn.Linear(4096, 1000),
nn.ReLU(inplace=True),
nn.Dropout(0.5),
nn.Linear(1000, num_classes)
)
def forward(self, x):
x = self.conv(x)
x = x.view(x.size(0), -1)
x = self.fc(x)
return x
def _initialize_weights(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu') # 何教授方法
if m.bias is not None:
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.Linear):
nn.init.normal_(m.weight, 0, 0.01) # 正态分布赋值
nn.init.constant_(m.bias, 0)
# ResNet50
class BottleNeck_1(nn.Module):
def __init__(self, in_chans, out_chans, stride):
super(BottleNeck_1, self).__init__()
self.conv1 = nn.Conv2d(in_chans, out_chans, kernel_size=1, stride=stride, bias=False)
self.batch_norm1 = nn.BatchNorm2d(out_chans)
self.conv2 = nn.Conv2d(out_chans, out_chans, kernel_size=3, stride=1, padding=1, bias=False)
self.batch_norm2 = nn.BatchNorm2d(out_chans)
self.conv3 = nn.Conv2d(out_chans, out_chans * 4, kernel_size=1, stride=1, bias=False)
self.batch_norm3 = nn.BatchNorm2d(out_chans * 4)
self.conv4 = nn.Conv2d(in_chans, out_chans * 4, kernel_size=1, stride=stride, bias=False)
self.batch_norm4 = nn.BatchNorm2d(out_chans * 4)
torch.nn.init.kaiming_normal_(self.conv1.weight, nonlinearity='relu')
torch.nn.init.constant_(self.batch_norm1.weight, 0.5)
torch.nn.init.zeros_(self.batch_norm1.bias)
torch.nn.init.kaiming_normal_(self.conv2.weight, nonlinearity='relu')
torch.nn.init.constant_(self.batch_norm2.weight, 0.5)
torch.nn.init.zeros_(self.batch_norm2.bias)
torch.nn.init.kaiming_normal_(self.conv3.weight, nonlinearity='relu')
torch.nn.init.constant_(self.batch_norm3.weight, 0.5)
torch.nn.init.zeros_(self.batch_norm3.bias)
torch.nn.init.kaiming_normal_(self.conv4.weight, nonlinearity='relu')
torch.nn.init.constant_(self.batch_norm4.weight, 0.5)
torch.nn.init.zeros_(self.batch_norm4.bias)
def forward(self, x):
out = self.conv1(x)
out = self.batch_norm1(out)
out = torch.relu(out)
out = self.conv2(out)
out = self.batch_norm2(out)
out = torch.relu(out)
out = self.conv3(out)
out = self.batch_norm3(out)
residual = self.conv4(x)
residual = self.batch_norm4(residual)
return torch.relu(out + residual)
class BottleNeck_2(nn.Module):
def __init__(self, n_chans):
super(BottleNeck_2, self).__init__()
self.conv1 = nn.Conv2d(n_chans, n_chans // 4, kernel_size=1, stride=1, bias=False)
self.batch_norm1 = nn.BatchNorm2d(n_chans // 4)
self.conv2 = nn.Conv2d(n_chans // 4, n_chans // 4, kernel_size=3, stride=1, padding=1, bias=False)
self.batch_norm2 = nn.BatchNorm2d(n_chans // 4)
self.conv3 = nn.Conv2d(n_chans // 4, n_chans, kernel_size=1, stride=1, bias=False)
self.batch_norm3 = nn.BatchNorm2d(n_chans)
torch.nn.init.kaiming_normal_(self.conv1.weight, nonlinearity='relu')
torch.nn.init.constant_(self.batch_norm1.weight, 0.5)
torch.nn.init.zeros_(self.batch_norm1.bias)
torch.nn.init.kaiming_normal_(self.conv2.weight, nonlinearity='relu')
torch.nn.init.constant_(self.batch_norm2.weight, 0.5)
torch.nn.init.zeros_(self.batch_norm2.bias)
torch.nn.init.kaiming_normal_(self.conv3.weight, nonlinearity='relu')
torch.nn.init.constant_(self.batch_norm3.weight, 0.5)
torch.nn.init.zeros_(self.batch_norm3.bias)
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.batch_norm1(out)
out = torch.relu(out)
out = self.conv2(out)
out = self.batch_norm2(out)
out = torch.relu(out)
out = self.conv3(out)
out = self.batch_norm3(out)
return torch.relu(out + residual)
class ResNet50(nn.Module):
def __init__(self, num_classes):
super().__init__()
self.num_classes = num_classes
self.stage0 = nn.Sequential(nn.Conv2d(3, 64, kernel_size=7, stride=2, bias=False),
nn.MaxPool2d(kernel_size=3, stride=2))
self.stage1 = nn.Sequential(BottleNeck_1(64, 64, 1), *(2 * [BottleNeck_2(256)]))
self.stage2 = nn.Sequential(BottleNeck_1(256, 128, 2), *(3 * [BottleNeck_2(512)]))
self.stage3 = nn.Sequential(BottleNeck_1(512, 256, 2), *(5 * [BottleNeck_2(1024)]))
self.stage4 = nn.Sequential(BottleNeck_1(1024, 512, 2), *(2 * [BottleNeck_2(2048)]))
self.conv = nn.Sequential(
self.stage0,
self.stage1,
self.stage2,
self.stage3,
self.stage4
)
self.fc = nn.Sequential(
nn.Linear(2048 * 7 * 7, 4096),
nn.ReLU(inplace=True),
nn.Dropout(0.5),
nn.Linear(4096, 1000),
nn.ReLU(inplace=True),
nn.Dropout(0.5),
nn.Linear(1000, num_classes)
)
def forward(self, x):
x = self.conv(x)
x = x.view(x.size(0), -1)
x = self.fc(x)
return x
# ResNet18
class ResBlock(nn.Module):
def __init__(self, in_channels, out_channels, stride):
super(ResBlock, self).__init__()
self.stride = stride
self.conv1 = nn.Sequential(
nn.Conv2d(in_channels=in_channels,
out_channels=out_channels,
stride=stride,
padding=1,
kernel_size=3,
bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=out_channels,
out_channels=out_channels,
stride=1,
padding=1,
kernel_size=3,
bias=False),
nn.BatchNorm2d(out_channels),
)
self.conv2 = nn.Conv2d(in_channels=in_channels,
out_channels=out_channels,
stride=stride,
kernel_size=1,
bias=False)
def forward(self, x):
out = self.conv1(x)
if self.stride == 2:
residual = self.conv2(x)
else:
residual = x
return torch.relu(residual + out)
class ResNet18(nn.Module):
def __init__(self, num_classes):
super().__init__()
self.num_classes = num_classes
self.stage0 = nn.Sequential(nn.Conv2d(in_channels=3,
out_channels=64,
kernel_size=7,
stride=2,
padding=3),
nn.MaxPool2d(kernel_size=3,
padding=1,
stride=2))
self.stage1 = nn.Sequential(ResBlock(64, 64, 1), ResBlock(64, 64, 1))
self.stage2 = nn.Sequential(ResBlock(64, 128, 2), ResBlock(128, 128, 1))
self.stage3 = nn.Sequential(ResBlock(128, 256, 2), ResBlock(256, 256, 1))
self.stage4 = nn.Sequential(ResBlock(256, 512, 2), ResBlock(512, 512, 1))
self.conv = nn.Sequential(self.stage0, self.stage1, self.stage2, self.stage3, self.stage4,
nn.AvgPool2d(kernel_size=7))
self.fn = nn.Sequential(nn.Linear(512, 256),
nn.ReLU(inplace=True),
nn.BatchNorm1d(256),
nn.Linear(256, num_classes))
self._initialize_weights()
def forward(self, x):
out = self.conv(x)
out = out.view(out.size(0), -1)
out = self.fn(out)
return out
def _initialize_weights(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu') # 何教授方法
if m.bias is not None:
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.Linear):
nn.init.normal_(m.weight, 0, 0.01) # 正态分布赋值
nn.init.constant_(m.bias, 0)
# GoogLeNet
class Inception(nn.Module):
def __init__(self, in_channels, ch1x1, ch3x3m, ch3x3, ch5x5m, ch5x5, ch1x1p):
super().__init__()
self.passage1 = nn.Sequential(nn.Conv2d(in_channels, ch1x1, kernel_size=1),
nn.BatchNorm2d(ch1x1),
nn.ReLU(inplace=True))
self.passage2 = nn.Sequential(nn.Conv2d(in_channels, ch3x3m, kernel_size=1),
nn.BatchNorm2d(ch3x3m),
nn.ReLU(ch3x3m),
nn.Conv2d(ch3x3m, ch3x3, kernel_size=3, padding=1),
nn.BatchNorm2d(ch3x3),
nn.ReLU(inplace=True))
self.passage3 = nn.Sequential(nn.Conv2d(in_channels, ch5x5m, kernel_size=1),
nn.BatchNorm2d(ch5x5m),
nn.ReLU(ch5x5m),
nn.Conv2d(ch5x5m, ch5x5, kernel_size=5, padding=2),
nn.BatchNorm2d(ch5x5),
nn.ReLU(inplace=True))
self.passage4 = nn.Sequential(nn.MaxPool2d(kernel_size=3, stride=1, padding=1),
nn.Conv2d(in_channels, ch1x1p, kernel_size=1),
nn.BatchNorm2d(ch1x1p),
nn.ReLU(inplace=True))
def forward(self, x):
passage_1 = self.passage1(x)
passage_2 = self.passage2(x)
passage_3 = self.passage3(x)
passage_4 = self.passage4(x)
outputs = [passage_1, passage_2, passage_3, passage_4]
return torch.cat(outputs, 1)
class GoogLeNet(nn.Module):
def __init__(self, num_classes=1000, init_weights=True):
super().__init__()
self.num_classes = num_classes
self.net = nn.Sequential(nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.MaxPool2d(3, stride=2, ceil_mode=True),
nn.Conv2d(64, 64, kernel_size=1),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.Conv2d(64, 192, kernel_size=3, padding=1),
nn.BatchNorm2d(192),
nn.ReLU(inplace=True),
nn.MaxPool2d(3, stride=2, ceil_mode=True),
Inception(192, 64, 96, 128, 16, 32, 32),
Inception(256, 128, 128, 192, 32, 96, 64),
nn.MaxPool2d(3, stride=2, ceil_mode=True),
Inception(480, 192, 96, 208, 16, 48, 64),
Inception(512, 160, 112, 224, 24, 64, 64),
Inception(512, 128, 128, 256, 24, 64, 64),
Inception(512, 112, 144, 288, 32, 64, 64),
Inception(528, 256, 160, 320, 32, 128, 128),
nn.MaxPool2d(3, stride=2, ceil_mode=True),
Inception(832, 256, 160, 320, 32, 128, 128),
Inception(832, 384, 192, 384, 48, 128, 128),
nn.AdaptiveAvgPool2d((1, 1)),
nn.Flatten(),
nn.Linear(1024, 256),
nn.BatchNorm1d(256),
nn.ReLU(inplace=True),
nn.Linear(256, num_classes))
def forward(self, x):
return self.net(x)
def _initialize_weights(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu') # 何教授方法
if m.bias is not None:
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.Linear):
nn.init.normal_(m.weight, 0, 0.01) # 正态分布赋值
nn.init.constant_(m.bias, 0)
def GetClassName(class_name):
xml_file = os.listdir(path_root + '/ILSVRC2012_bbox_train_dogs/' + class_name)[0]
tree = ET.ElementTree(file=path_root + '/ILSVRC2012_bbox_train_dogs/' + class_name + '/' + xml_file)
return tree.find('object').find('name').text
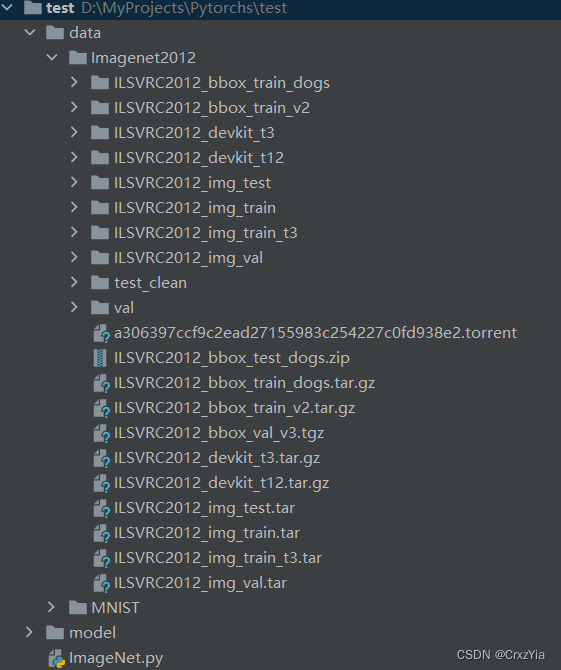
path_root = "data/Imagenet2012/"
transform = T.Compose([
T.RandomResizedCrop(224),
T.RandomHorizontalFlip(),
T.ToTensor(),
T.Normalize([0.4777, 0.4455, 0.3886], [0.2602, 0.2534, 0.2558])])
image_net_train = datasets.ImageFolder(path_root + 'ILSVRC2012_img_train_t3',
transform=transform)
image_net_train_loader = DataLoader(image_net_train, batch_size=100, shuffle=True)
def train(learning_rate=1e-2, n_epochs=10, model_path=None, net=None, num_classes=120, train_offset=0):
device = (torch.device('cuda') if torch.cuda.is_available() else torch.device('cpu'))
print(f"Training on device {device}.")
if net is None:
net = AlexNet
if model_path is None:
model = net(num_classes=num_classes).to(device=device)
else:
model = net(num_classes=num_classes).to(device=device)
model.load_state_dict(torch.load(model_path))
optimizer = optim.SGD(model.parameters(), learning_rate)
loss_fn = nn.CrossEntropyLoss()
for epoch in range(1, n_epochs + 1):
loss_train = 0.0
for imgs, labels in image_net_train_loader:
imgs = imgs.to(device=device)
labels = labels.to(device=device)
outputs = model(imgs)
loss = loss_fn(outputs, labels)
optimizer.zero_grad()
loss.backward()
optimizer.step()
loss_train += loss.item()
print('{} Epoch: {},Training loss: {}'.format(datetime.datetime.now(), epoch,
loss_train / len(image_net_train_loader)))
if not os.path.exists("model/ImageNet/" + net.__name__):
os.makedirs("model/ImageNet/" + net.__name__)
torch.save(model.state_dict(),
"model/ImageNet/" + net.__name__ + "/epoch_" + str(epoch + train_offset) + ".model")
def predict(image_path, model_path=None, net=None, num_classes=120):
img_transformer = T.Compose([
T.Resize((224, 224)),
T.ToTensor(),
T.Normalize([0.4777, 0.4455, 0.3886], [0.2602, 0.2534, 0.2558])])
device = (torch.device('cuda') if torch.cuda.is_available() else torch.device('cpu'))
print(f"Training on device {device}.")
img = Image.open(image_path)
img = img_transformer(img).to(device=device)
if net is None:
net = AlexNet
if model_path is None:
model = net(num_classes=num_classes).to(device=device)
else:
model = net(num_classes=num_classes).to(device=device)
model.load_state_dict(torch.load(model_path))
model.eval()
output = model(img.unsqueeze(0))
_, predicted = torch.max(output, dim=1)
return GetClassName(image_net_train.classes[predicted.item()])
if __name__ == "__main__":
# predict
# print(predict("img_16.png", "model/ImageNet/ResNet18/epoch_700.model", net=ResNet18))
# print(predict("img_5.png", "model/ImageNet/GoogLeNet/epoch_12.model", net=GoogLeNet))
# train
# train(model_path="model/ImageNet/AlexNet/epoch_1120.model", n_epochs=1000) #4.786365736098516
# train(model_path="model/ImageNet/ResNet50/epoch_3.model", net=ResNet50, n_epochs=10, train_offset=6)
# train(model_path="model/ImageNet/ResNet18/epoch_700.model", net=ResNet18, n_epochs=50, train_offset=700)
train(model_path="model/ImageNet/GoogLeNet/epoch_12.model", net=GoogLeNet, n_epochs=50, train_offset=12)
#
目录结构(数据集使用ImageNet2012)
版权声明:本文为weixin_41276201原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。