超前补偿器:
作用:
使根轨迹向左,提高稳定性,加快反应速度。
应用实例:
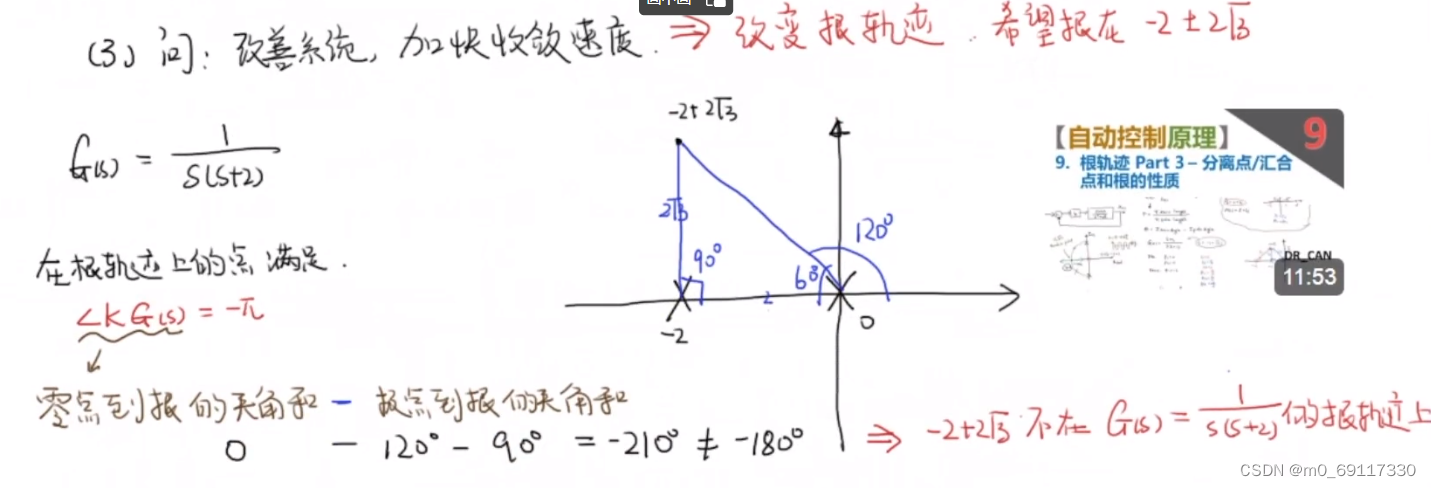
条件:
(可以根据根轨迹的性质可知,该点不在根轨迹上)
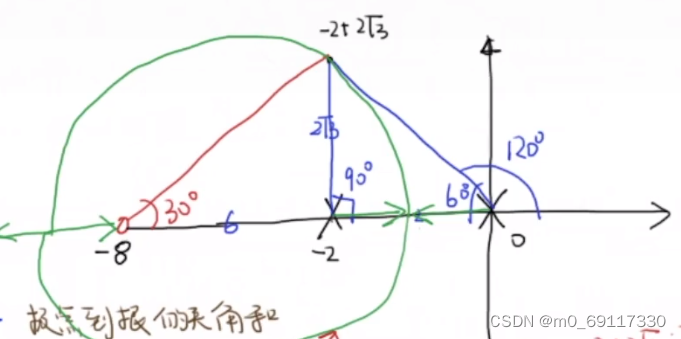
方法1:
(通过增加零点改变根轨迹)

缺点:
1. 无法通过被动原件实现,需要增加新的能量来源
2. 对高频噪声敏感
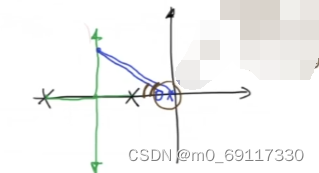
方法2:
(通过增加超前补偿器,即同时增加零点和极点)
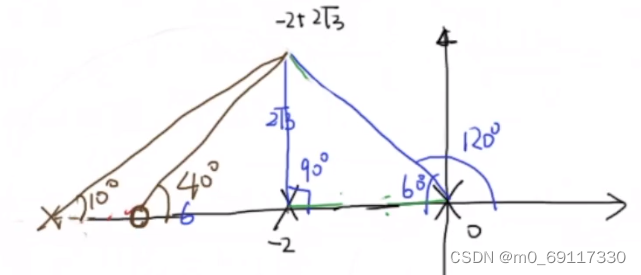
使根轨迹向左,提高稳定性,加快反应速度。
滞后补偿器:
作用:
减小稳态误差。
在使用滞后补偿器时,Z和P的值应该尽可能地接近虚轴。因为新增的一对零/极点靠近虚轴时才不会对原有系统的根轨迹产生大的影响。

特例:
当p=0时,滞后补偿器即为PI控制器。
PID控制总结:
单纯的P控制器不能减小稳态误差;
PI控制器可以减小稳态误差,但是相比P控制器,波动会更大;
PID控制器既可以减小稳态误差,也可以减小系统的波动,但是初值非常高、对高频噪声敏感。
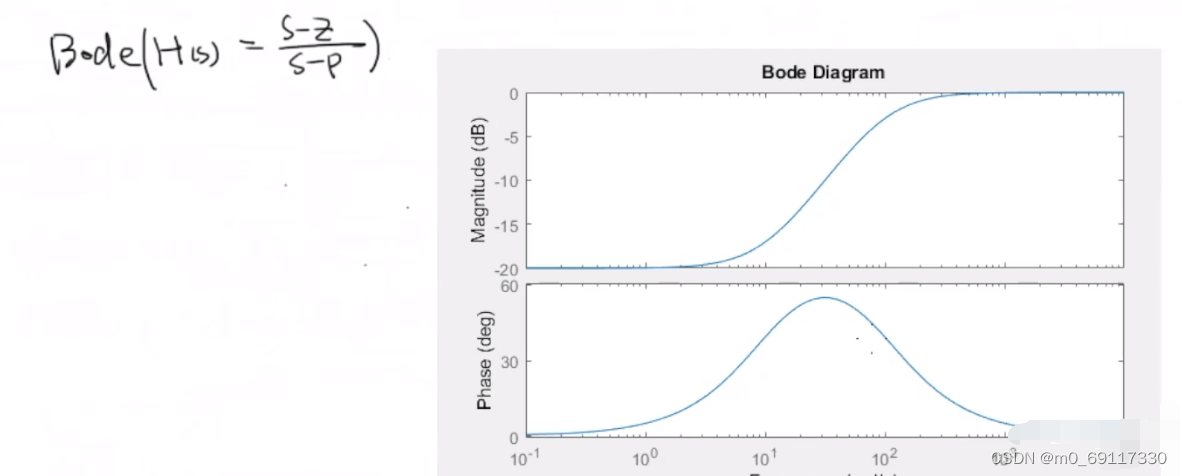
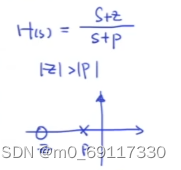
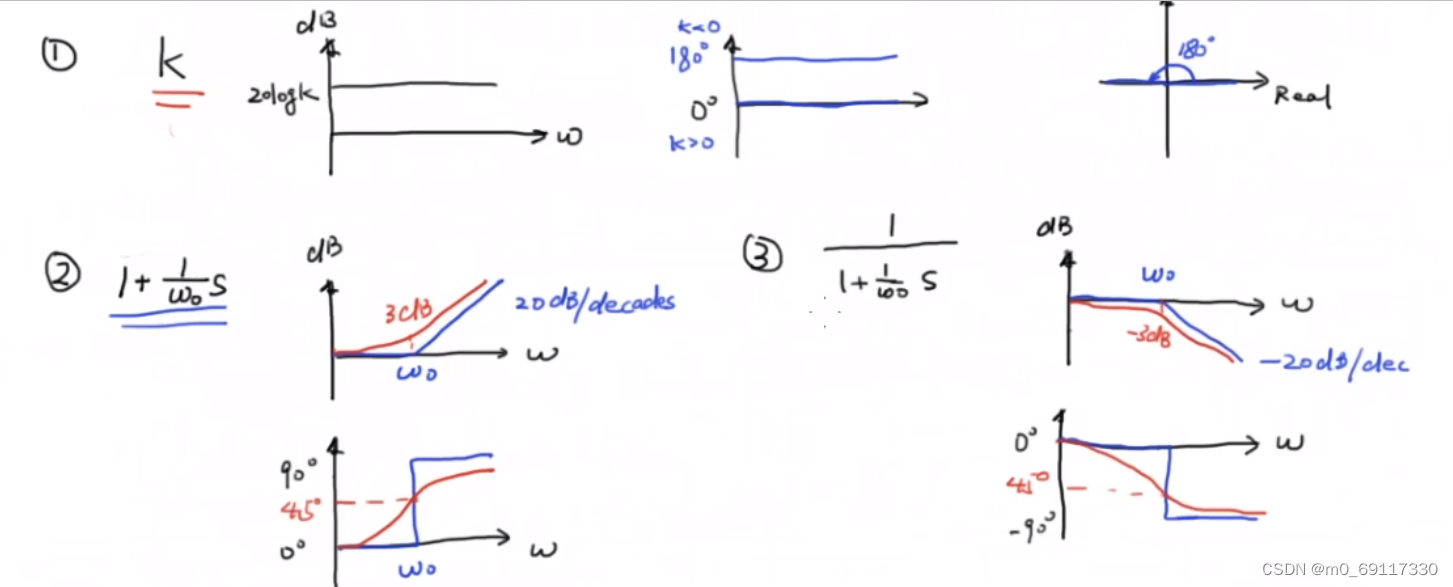
伯德图:
基本种类:
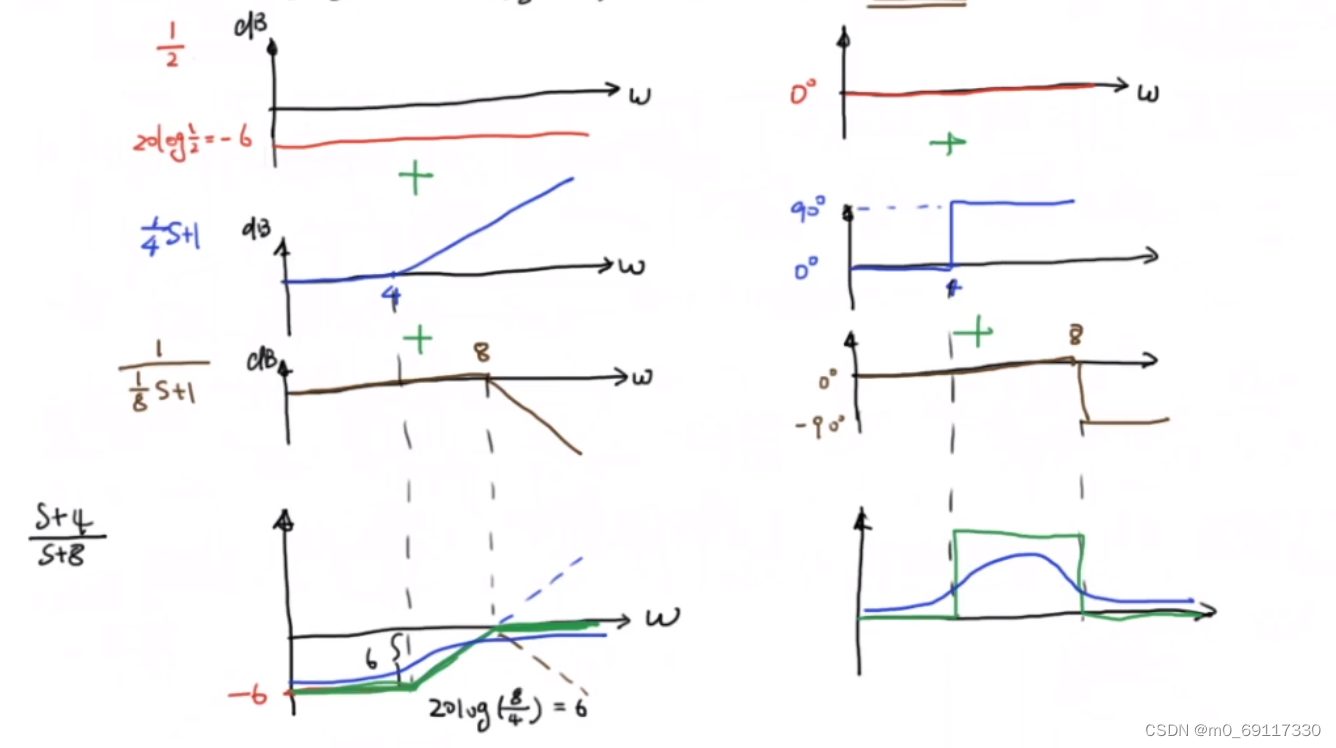
例题:

版权声明:本文为m0_69117330原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。