KITTI数据集介绍
Kitti数据集是目前国际上最大的自动驾驶场景下的计算机视觉算法评测数据集。KITTI包含市区、乡村和高速公路等场景采集的真实图像数据,每张图像中最多达15辆车和30个行人,还有各种程度的遮挡与截断。


KITTI数据集采集平台
KITTI数据集的数据采集平台装配有2个灰度摄像机,2个彩色摄像机,一个Velodyne64线3D激光雷达,4个光学镜头,以及1个GPS导航系统。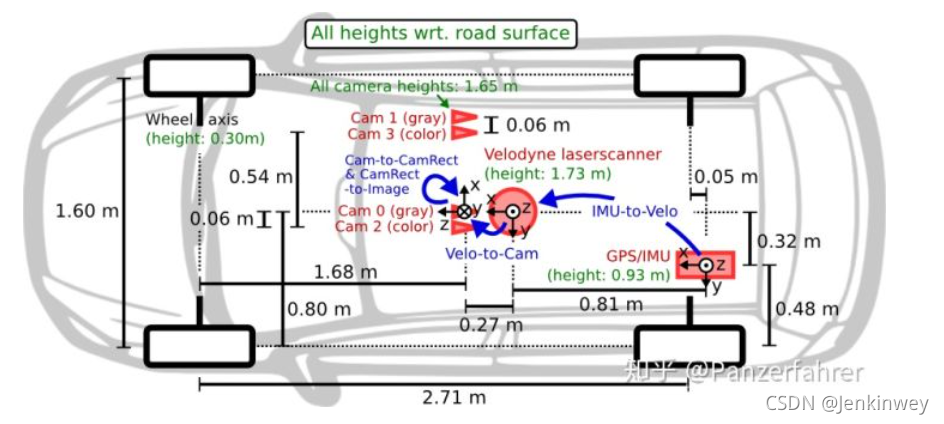
相机、激光雷达、IMU坐标系的方向分别为:
- 相机:x 轴向右,y 轴向下,z 轴向前
- Velodyne(激光雷达):x 轴向前,y 轴向左,z轴向上
- GPS / IMU:x 轴向前,y 轴向左,z 轴向上
KITTI标定文件介绍
一个典型的标定文件如下所示: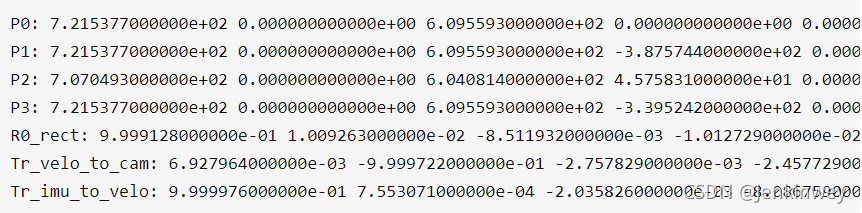
0、1、2、3分别代表左边灰度相机、右边灰度相机、左边彩色相机和右边彩色相机P0, P1, P2, P3分别代表对应的相机内参矩阵, 大小为 3x4R0_rect为0号相机的修正矩阵Tr_velo_to_cam为velodyne到camera的矩阵 大小为3x4,包含了旋转矩阵 R 和 平移向量 t
要将Velodyne激光雷达坐标系中的点x投影到左侧的彩色图像中y,使用公式:
y = P2 * R0_rect *Tr_velo_to_cam * x
上面公式的意思是:将Velodyne坐标中的点x投影到编号为0的相机(参考相机)坐标系中,再修正,然后投影到编号为2的相机(左彩色相机)
版权声明:本文为qq_37591788原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。