ADRC最核心的创新点在于ESO,与PID相比,不仅基于误差控制,还基于扰动进行控制量计算。
1、ADRC的控制框图如下:主要包括跟踪微分器(TD)、非线性状态误差反馈(NLSEF)、扩张状态观测器(ESO)。

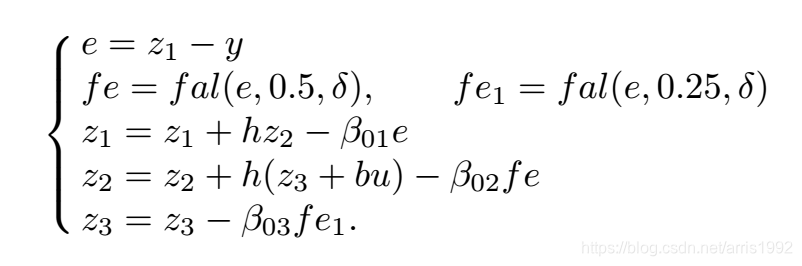
2、ESO的公式:
3、用simulink搭建eso,如图所示:

4、将上述eso封装为subsystem,输入输出如下所示:

版权声明:本文为arris1992原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。
ADRC最核心的创新点在于ESO,与PID相比,不仅基于误差控制,还基于扰动进行控制量计算。
1、ADRC的控制框图如下:主要包括跟踪微分器(TD)、非线性状态误差反馈(NLSEF)、扩张状态观测器(ESO)。
2、ESO的公式:
3、用simulink搭建eso,如图所示:
4、将上述eso封装为subsystem,输入输出如下所示: