应用stm32f10x的定时器TIM3的PWM实现歌曲播放
材料:无源蜂鸣器 stm32开发板
无源蜂鸣器的相关资料如下:
无源蜂鸣器分为电磁式蜂鸣器和压电式蜂鸣器,本实验所用蜂鸣器为压电式蜂鸣器,压电式蜂鸣器主要由多谐振荡器,阻抗匹配器以及共鸣箱,外壳等组成,而多谐振荡器由晶体管或集成电路构成,当接通电源后(1.5v-15v直流工作电压),多谐振荡器起振,输出1.5khz-2.5khz的音频信号,阻抗匹配器推动压电蜂鸣器发声。
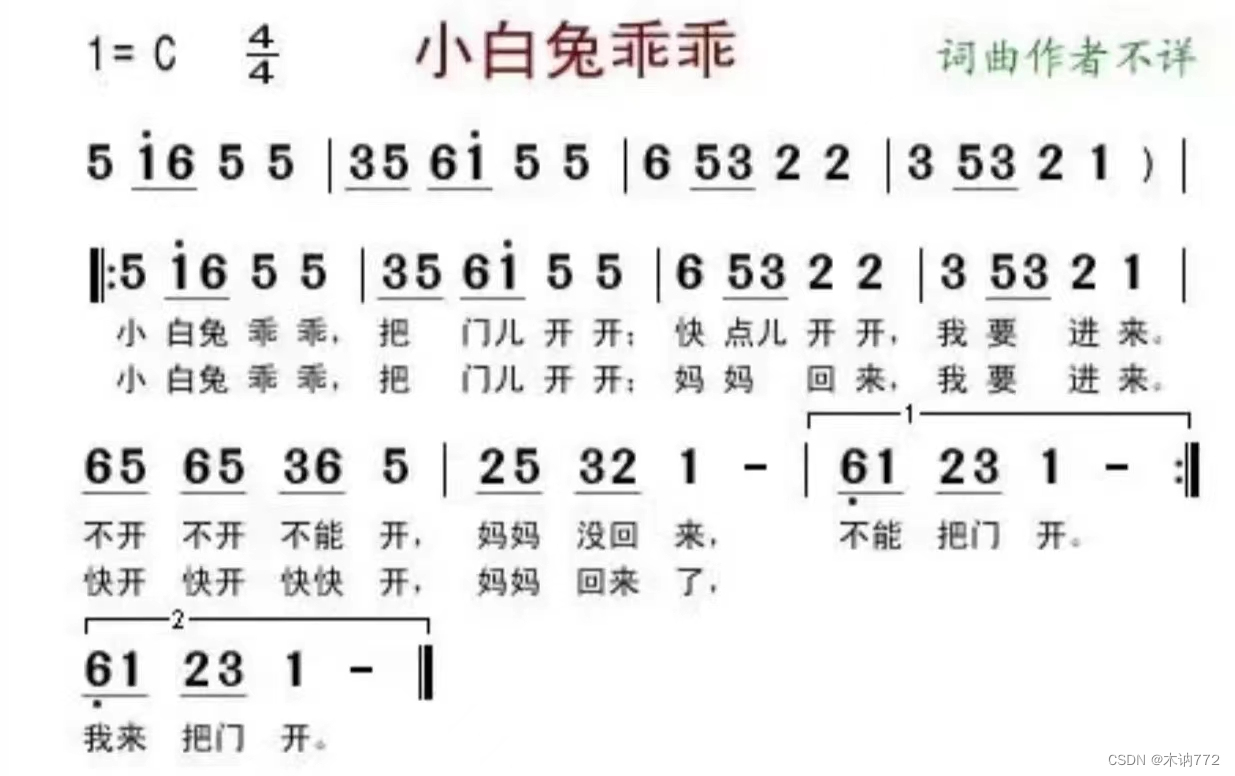
《小兔子乖乖》简谱:
Dolamifasolaxi的频率:
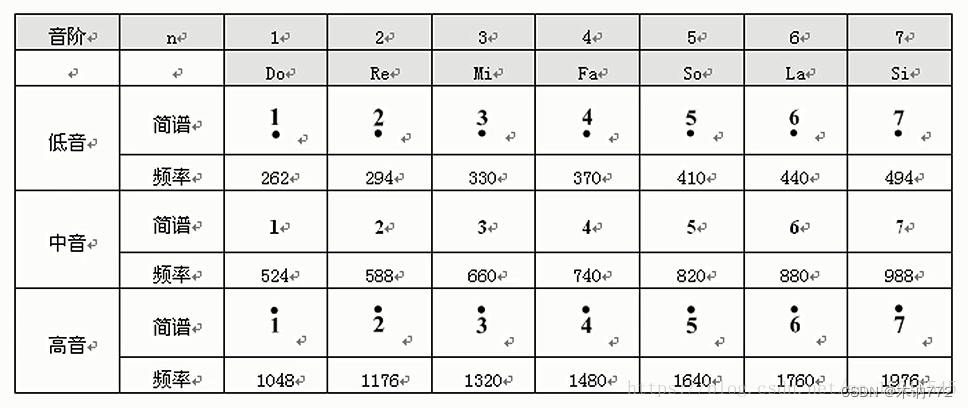
计算定时器溢出时间:Tout = (arr+1)*(psc+1)/Tclk
arr:自动重装载寄存器的值,用于设置定时器的周期。(单位:us)
ccrx:用于设置占空比。
psc:预分频系数(1-65535)
Tclk:系统总时钟,定时器的输入时钟频率(单位:Mhz),这里时钟选择为APB1的2倍,而APB1为36M,故Tclk为72Mhz。
利用通用定时器TIM3实现歌曲编写以及播放,这里以儿歌《小兔子乖乖》为例,在本实验中设置了蜂鸣器输出的音频信号为2khz。
程序代码(创建一个.c文件,将以下代码放入其中)如下:
创建函数TIM3_PWM_Init(u16 arr,u16 psc),用arr(计数器上限值),psc(预分频系数)作为参数。
void TIM3_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;首先是使能定时器的时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能定时器3时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟- Timer3部分重映射 TIM3_CH2->PB5
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //Timer3部分重映射 TIM3_CH2->PB5
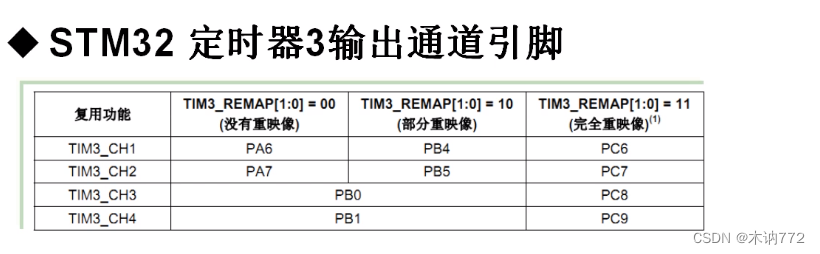
在本实验中,将定时器3的通道2即TIM3_CH2重映射到了PB5引脚上(当然并不是所有的引脚都可以重映射,都需要重映射),关于引脚重映射的相关信息见下表:
第二,TIM3 PWM重映射引脚的初始化
//设置该引脚为复用输出功能,输出TIM3 CH2的PWM脉冲波形 GPIOB.5
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //TIM_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO第三,初始化定时器TIM3
//初始化TIM3
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位第四,初始化TIM3 Channel2 PWM模式
//初始化TIM3 Channel2 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器
TIM_Cmd(TIM3, ENABLE); //使能TIM3
PWM有两种模式:模式1[110],模式2[111]
PWM模式1在向上计数时,一旦TIM_CNT<TIM_CCR时,通道1为有效电平,否则为无效电平,在向下计数是,TIM_CNT<TIM_CCR时,通道1为有效电平,否则为无效电平。模式2反之。
PWM的输出极性(TIM_OCInitStructur.TIM_OCPolarity):若输出极性为高,则表示此时的有效电平输出的为高电平,否则若为低,则表示此时的有效电平为低电平。
计数预装载寄存器ARRE =1时,ARR立即生效,当ARRE=0时,更新后的ARR的值下个比较周期生效。
main函数如下:
#include "led.h"
#include "delay.h"
#include "key.h"
#include "sys.h"
#include "usart.h"
#include "timer.h"
int main(void)
{
int a[42]={25,19,22,25,25,30,25,22,19,25,25,22,25,30,33,33,30,25,30,32,30,38,22,25,22,25,30,22,25,25,25,25,30,33,38,38,38,38,33,30,38,38};
int b[42]={250,125,125,250,250,125,125,125,125,250,250,250,125,125,250,250,250,125,125,125,125,250,250,250,250,250,250,250,250,250,125,125,125,125,250,250,125,125,125,125,250,250};
int i = 0;
int j = 0;
vu8 key = 0;
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
uart_init(115200); //串口初始化为115200
KEY_Init();
while(1)
{
TIM3_PWM_Init(a[i],7199);
TIM_SetCompare2(TIM3,a[i]/2);
delay_ms(b[j]*2);
i++;
j++;
if(i==41&&j==41)
break;
delay_ms(10);
}
}
要想实现歌曲的播放,那么就离不开基本音哆啦咪发嗦啦西以及音乐的节拍。要想实现7个基本音并不困难,根据7个基本音的频率不同,只需要在主函数调用函数TIM3_PWM_Init(),向该函数传递参数(arr,psc),然后根据定时器溢出时间的计算公式:Tout = (arr+1)*(psc+1)/Tclk计算出不同频率下arr,psc的值,将计算好的频率写入数组中,其次再设置占空比,这里设置占空比为50%((a[i] / 2) / a[i]),即可完成每个音的设置。而对于节拍(即每个音所占时长),从简谱中不难看出,该简谱是以4拍为一小节,一小节的时间为1s。本实验设置了一拍为250ms,然后根据简谱对每一个拍所占时间进行计算,然后将其放进数组b中,对数组a和数组b分别进行遍历,进而实现。