
B站|公众号:啥都会一点的研究生
官网地址:http://wiki.ros.org/cn/melodic/Installation/Ubuntu
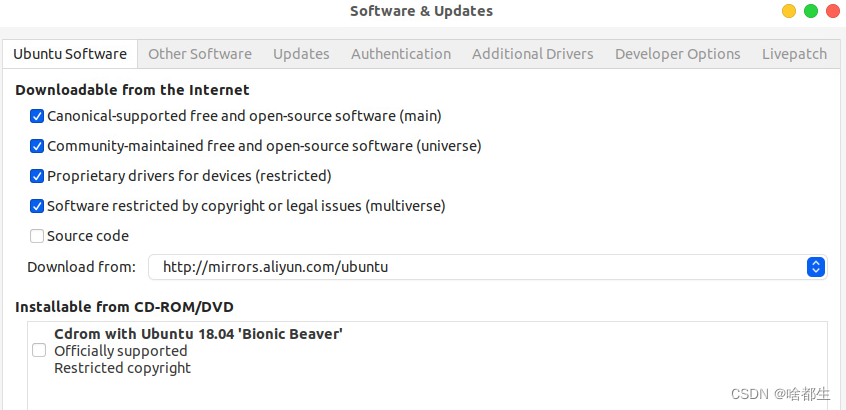
换源
设置中找到Software & Update->Ubuntu Software,设置阿里、清华都行
如果在docker中或者其他仅能在终端操作换源的场景,如果你不属于这种情况请直接下一步
备份
sudo cp /etc/apt/sources.list /etc/apt/sources_copy.list
访问
sudo vim /etc/apt/sources.list
替换里面的内容
deb http://mirrors.aliyun.com/ubuntu/ bionic main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-security main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-security main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-updates main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-updates main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-proposed main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-proposed main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-backports main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-backports main restricted universe multiverse
设置软件源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
设置秘钥
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
安装
sudo apt-get update
sudo apt-get install ros-melodic-desktop-full
sudo apt-get install ros-melodic-rqt*
初始化rosdep
sudo rosdep init
rosdep update
配置环境
echo "source /opt/ros/melodic/setup.bash" >>~/.bashrc
构建工厂依赖
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
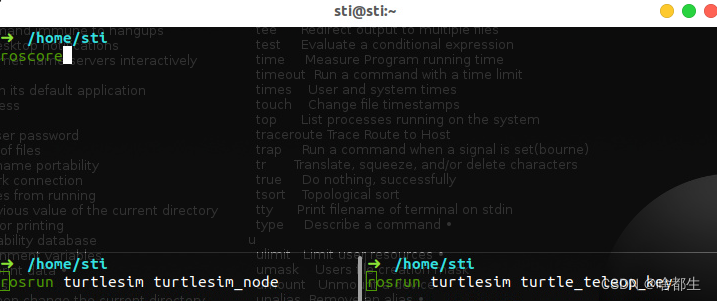
测试是否成功
- 打开
三个独立终端,先运行roscore
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key

版权声明:本文为zzh516451964zzh原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。