Ubuntu16.04 ros使用,通过rviz获取kinectv2的点云信息
rviz显示kinectv2的点云信息
启动launch文件
roslaunch kinect2_bridge kinect2_bridge.launch publish_tf:=true
运行rviz
rosrun rviz rviz
修改设置
1.选中Fixed Frame,在右侧点击出现选择框,kinect2_link 2.添加PointCloud2
2.添加PointCloud2
点击左下角Add,选中By display type,在列表中选择PointCloud2 3.将PointCloud2中的Topic改成kinect2/sd/point
3.将PointCloud2中的Topic改成kinect2/sd/point
方法同第一个修改方法,选中Topic,右侧框点击鼠标下拉框选择
结果如下: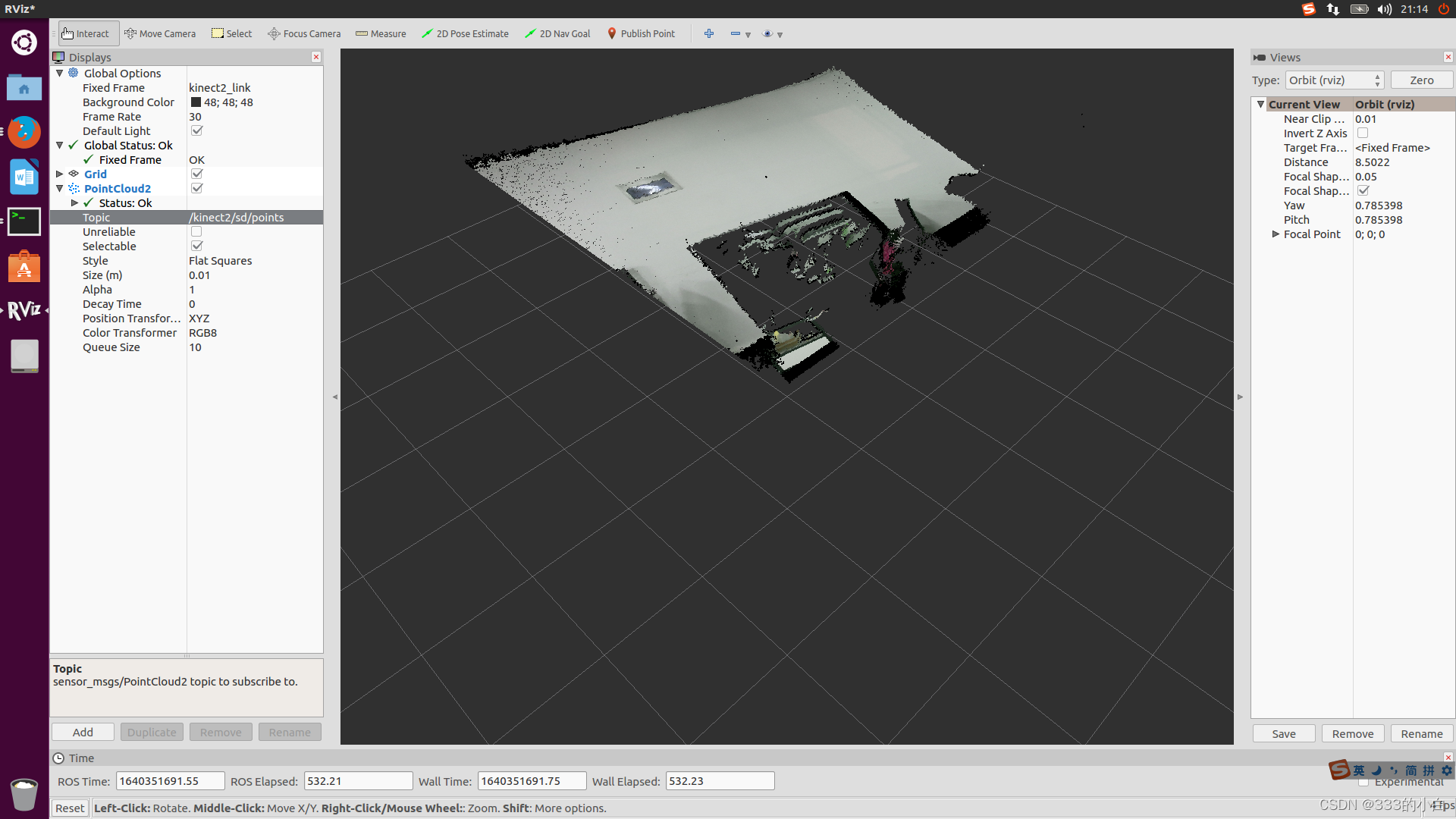
版权声明:本文为creative1原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。