 Fu Xianjun. All Rights Reserved.
Fu Xianjun. All Rights Reserved.
前言
边缘检测虽然能够检测出边缘,但边缘是不连续的,检测到边缘并不是一个整体。
二、使用步骤
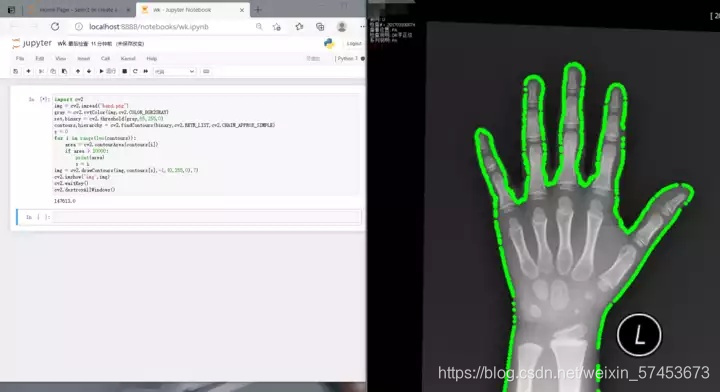
1.轮廓查找与绘制
1.使用cv2.findContours()函数,实现图像轮廓的查找。
2.使用cv2.drawContours()函数,实现图像轮廓的绘制。
contours,hierarchy=cv2.findContours(image,mode,method)
contours:返回的轮廓。
hierarchy:图像的拓扑信息(轮廓层次)。
image:输入的图像。
mode:轮廓搜索模式:决定了轮廓的提取方式。
method:轮廓近似方法:决定了如何表达轮廓。
2.计算轮廓的面积及长度
image=cv2.drawContours(image, contours, contourIdx, color, thickness=None, lineType=None, hierarchy=None, maxLevel=None, offset=None)
length=cv2.arcLength(curve,closed)
curve :轮廓。 closed :布尔值,当为True时,表示闭合。
area=cv2.contourArea(contour [, oriented])
contour :轮廓。 oriented:布尔值,当为True时,表示顺时针或逆时针计算。
retval=cv2.moments(array[,binaryImage]
array:可以是点集,也可以是灰度图像或者二值图像。 binaryImage:当为True时,array内所有的非零值都会被处理为1。
3.使用Hu特征进行形状匹配
retval = cv2.matchShapes(contour1, contour2, method, 0.0)
contour1 :第一个轮廓或灰度图像。 contour2:第二个灰度或轮廓图像。 method :比较两个对象的Hu 矩的方法,写1。
4.轮廓的几何形状拟合
retval = cv2.boundingRect( array )
retval:矩形边界左上角顶点的坐标值及矩形边界的宽度和高度。 contour2:第二个灰度或轮廓图像。 method :比较两个对象的Hu 矩的方法,写1。
retval =cv2.minAreaRect( points )
retval:回的矩阵特征信息,结构是(最小外接矩形的中心(x,y),(宽度,高度),旋转角度)。 points:轮廓。
center, radius = cv2.minEnclosingCircle( points )
center:圆形。 radius:半径。 points:轮廓。
retval = cv2.fitEllipse( points )
center:RotatedRect 类型的值,这个是拟合椭圆的外界矩形,包含外接矩形的质心,宽,高,旋转角度等参数信息,这些信息与椭圆的中心点,轴长度,旋转角度等信息吻合。 points:轮廓。
line = cv2.fitLine( points, distType, param, reps, aeps )
approx = cv2.approxPolyDP(contour[0],epsilon,True)
总结
图像轮廓是图像中非常重要的一个特征信息,通过对图像轮廓的操作,我们能够获取目标图像的大小,位置,方向等。