resnet
论文:https://arxiv.org/pdf/1512.03385.pdf
翻译转载:https://blog.csdn.net/Quincuntial/article/details/77263562
网络结构1:https://blog.csdn.net/nima1994/article/details/82686132
网络结构2:https://blog.csdn.net/seven_year_promise/article/details/69360488
这几天看了tensorflow搭建的resnet模型,十分的干净利落。将结合代码的分析记录,以防遗忘。
模型位于 /tensorflow/model/research/slim/nets/resnet_v1.py
在该文件中可以直接找到 resnet_v1_50 函数,这是最基础的resnet网络模型,与101,152的结构是一致的,所以就此进行分析。
def resnet_v1_50(inputs,
num_classes=None,
is_training=True,
global_pool=True,
output_stride=None,
spatial_squeeze=True,
store_non_strided_activations=False,
reuse=None,
scope='resnet_v1_50'):
"""ResNet-50 model of [1]. See resnet_v1() for arg and return description."""
blocks = [
resnet_v1_block('block1', base_depth=64, num_units=3, stride=2),
resnet_v1_block('block2', base_depth=128, num_units=4, stride=2),
resnet_v1_block('block3', base_depth=256, num_units=6, stride=2),
resnet_v1_block('block4', base_depth=512, num_units=3, stride=1),
]
return resnet_v1(inputs, blocks, num_classes, is_training,
global_pool=global_pool, output_stride=output_stride,
include_root_block=True, spatial_squeeze=spatial_squeeze,
store_non_strided_activations=store_non_strided_activations,
reuse=reuse, scope=scope)
resnet_v1_50.default_image_size = resnet_v1.default_image_size
可以看到该blocks直接由4个resnet_v1_block顺次构成,好简洁。。。结合论文中给出了网络结构模型进行分析。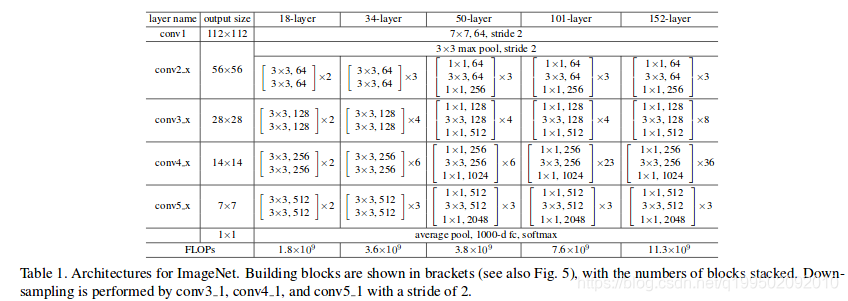
可以看到论文中resnet50的resnet模块就是3,4,6,3的分布卷积核数目分别是64,128,256,512,这一部分意义印证。
接下来进入到 resnet_v1_block 函数
def resnet_v1_block(scope, base_depth, num_units, stride):
"""Helper function for creating a resnet_v1 bottleneck block.
Args:
scope: The scope of the block.
base_depth: The depth of the bottleneck layer for each unit.
num_units: The number of units in the block.
stride: The stride of the block, implemented as a stride in the last unit.
All other units have stride=1.
Returns:
A resnet_v1 bottleneck block.
"""
return resnet_utils.Block(scope, bottleneck, [{
'depth': base_depth * 4,
'depth_bottleneck': base_depth,
'stride': 1
}] * (num_units - 1) + [{
'depth': base_depth * 4,
'depth_bottleneck': base_depth,
'stride': stride
}])
这部分内容主要是参数传递,将参数传递到bottleneck中,而且虽然创建的总数是对的,但是实际上是2+1,这里的步长为2就是下采样准备的
def bottleneck(inputs,
depth,
depth_bottleneck,
stride,
rate=1,
outputs_collections=None,
scope=None,
use_bounded_activations=False):
"""Bottleneck residual unit variant with BN after convolutions.
This is the original residual unit proposed in [1]. See Fig. 1(a) of [2] for
its definition. Note that we use here the bottleneck variant which has an
extra bottleneck layer.
传入的步长参数2在这里使用,步长为2相当于进行了一次pool,论文里分别为conv3_1,conv4_1,conv5_1,将两个resnet模块连接在了一起。
When putting together two consecutive ResNet blocks that use this unit, one
should use stride = 2 in the last unit of the first block.
Args:
inputs: A tensor of size [batch, height, width, channels].
depth: The depth of the ResNet unit output.
depth_bottleneck: The depth of the bottleneck layers.
stride: The ResNet unit's stride. Determines the amount of downsampling of
the units output compared to its input.
rate: An integer, rate for atrous convolution.
outputs_collections: Collection to add the ResNet unit output.
scope: Optional variable_scope.
use_bounded_activations: Whether or not to use bounded activations. Bounded
activations better lend themselves to quantized inference.
Returns:
The ResNet unit's output.
"""
#input进入后分为两部分一部分是shortcut一部分是瓶颈模块
#先进行一次1*1×(depth_bottleneck×4)的卷积,这部分为shortcut
with tf.variable_scope(scope, 'bottleneck_v1', [inputs]) as sc:
depth_in = slim.utils.last_dimension(inputs.get_shape(), min_rank=4)
if depth == depth_in:
#下采样
shortcut = resnet_utils.subsample(inputs, stride, 'shortcut')
else:
shortcut = slim.conv2d(
inputs,
depth, [1, 1],
stride=stride,
activation_fn=tf.nn.relu6 if use_bounded_activations else None,
scope='shortcut')
#该部分的注释可以核论文进行验证。resnet提出的瓶颈模块,两个1*1用于减小然后增加维数,使3*3成为输入输出维数较小的瓶颈
residual = slim.conv2d(inputs, depth_bottleneck, [1, 1], stride=1,
scope='conv1')
residual = resnet_utils.conv2d_same(residual, depth_bottleneck, 3, stride,
rate=rate, scope='conv2')
residual = slim.conv2d(residual, depth, [1, 1], stride=1,
activation_fn=None, scope='conv3')
if use_bounded_activations:
# Use clip_by_value to simulate bandpass activation.维度整合并进行激活
residual = tf.clip_by_value(residual, -6.0, 6.0)
output = tf.nn.relu6(shortcut + residual)
else:
output = tf.nn.relu(shortcut + residual)
return slim.utils.collect_named_outputs(outputs_collections,
sc.name,
output)
至此完成了各resnet模块的构建。resnet 的头部网络在 resnet_v1 函数中实现。
def resnet_v1(inputs,
blocks,
num_classes=None,
is_training=True,
global_pool=True,
output_stride=None,
include_root_block=True,
spatial_squeeze=True,
store_non_strided_activations=False,
reuse=None,
scope=None):
"""Generator for v1 ResNet models.
This function generates a family of ResNet v1 models. See the resnet_v1_*()
methods for specific model instantiations, obtained by selecting different
block instantiations that produce ResNets of various depths.
Training for image classification on Imagenet is usually done with [224, 224]
inputs, resulting in [7, 7] feature maps at the output of the last ResNet
block for the ResNets defined in [1] that have nominal stride equal to 32.
However, for dense prediction tasks we advise that one uses inputs with
spatial dimensions that are multiples of 32 plus 1, e.g., [321, 321]. In
this case the feature maps at the ResNet output will have spatial shape
[(height - 1) / output_stride + 1, (width - 1) / output_stride + 1]
and corners exactly aligned with the input image corners, which greatly
facilitates alignment of the features to the image. Using as input [225, 225]
images results in [8, 8] feature maps at the output of the last ResNet block.
For dense prediction tasks, the ResNet needs to run in fully-convolutional
(FCN) mode and global_pool needs to be set to False. The ResNets in [1, 2] all
have nominal stride equal to 32 and a good choice in FCN mode is to use
output_stride=16 in order to increase the density of the computed features at
small computational and memory overhead, cf. http://arxiv.org/abs/1606.00915.
Args:
inputs: A tensor of size [batch, height_in, width_in, channels].
blocks: A list of length equal to the number of ResNet blocks. Each element
is a resnet_utils.Block object describing the units in the block.
num_classes: Number of predicted classes for classification tasks.
If 0 or None, we return the features before the logit layer.
is_training: whether batch_norm layers are in training mode. If this is set
to None, the callers can specify slim.batch_norm's is_training parameter
from an outer slim.arg_scope.
global_pool: If True, we perform global average pooling before computing the
logits. Set to True for image classification, False for dense prediction.
output_stride: If None, then the output will be computed at the nominal
network stride. If output_stride is not None, it specifies the requested
ratio of input to output spatial resolution.
include_root_block: If True, include the initial convolution followed by
max-pooling, if False excludes it.
spatial_squeeze: if True, logits is of shape [B, C], if false logits is
of shape [B, 1, 1, C], where B is batch_size and C is number of classes.
To use this parameter, the input images must be smaller than 300x300
pixels, in which case the output logit layer does not contain spatial
information and can be removed.
store_non_strided_activations: If True, we compute non-strided (undecimated)
activations at the last unit of each block and store them in the
`outputs_collections` before subsampling them. This gives us access to
higher resolution intermediate activations which are useful in some
dense prediction problems but increases 4x the computation and memory cost
at the last unit of each block.
reuse: whether or not the network and its variables should be reused. To be
able to reuse 'scope' must be given.
scope: Optional variable_scope.
Returns:
net: A rank-4 tensor of size [batch, height_out, width_out, channels_out].
If global_pool is False, then height_out and width_out are reduced by a
factor of output_stride compared to the respective height_in and width_in,
else both height_out and width_out equal one. If num_classes is 0 or None,
then net is the output of the last ResNet block, potentially after global
average pooling. If num_classes a non-zero integer, net contains the
pre-softmax activations.
end_points: A dictionary from components of the network to the corresponding
activation.
Raises:
ValueError: If the target output_stride is not valid.
"""
with tf.variable_scope(scope, 'resnet_v1', [inputs], reuse=reuse) as sc:
end_points_collection = sc.original_name_scope + '_end_points'
with slim.arg_scope([slim.conv2d, bottleneck,
resnet_utils.stack_blocks_dense],
outputs_collections=end_points_collection):
with (slim.arg_scope([slim.batch_norm], is_training=is_training)
if is_training is not None else NoOpScope()):
net = inputs
if include_root_block:
if output_stride is not None:
if output_stride % 4 != 0:
raise ValueError('The output_stride needs to be a multiple of 4.')
output_stride /= 4
net = resnet_utils.conv2d_same(net, 64, 7, stride=2, scope='conv1')
net = slim.max_pool2d(net, [3, 3], stride=2, scope='pool1')
net = resnet_utils.stack_blocks_dense(net, blocks, output_stride,
store_non_strided_activations)
# Convert end_points_collection into a dictionary of end_points.
end_points = slim.utils.convert_collection_to_dict(
end_points_collection)
if global_pool:
# Global average pooling.
net = tf.reduce_mean(net, [1, 2], name='pool5', keep_dims=True)
end_points['global_pool'] = net
if num_classes:
net = slim.conv2d(net, num_classes, [1, 1], activation_fn=None,
normalizer_fn=None, scope='logits')
end_points[sc.name + '/logits'] = net
if spatial_squeeze:
net = tf.squeeze(net, [1, 2], name='SpatialSqueeze')
end_points[sc.name + '/spatial_squeeze'] = net
end_points['predictions'] = slim.softmax(net, scope='predictions')
return net, end_points
resnet_v1.default_image_size = 224
通过 net = resnet_utils.stack_blocks_dense(net, blocks, output_stride, store_non_strided_activations),将block模块加入了网络。具体实现大家看一调到相对应的函数去看。
写到最后发现已经有人写过类似的东西了。。。这里也贴出来,中间有一部分稍微不同。
https://www.jianshu.com/p/3af06422c768