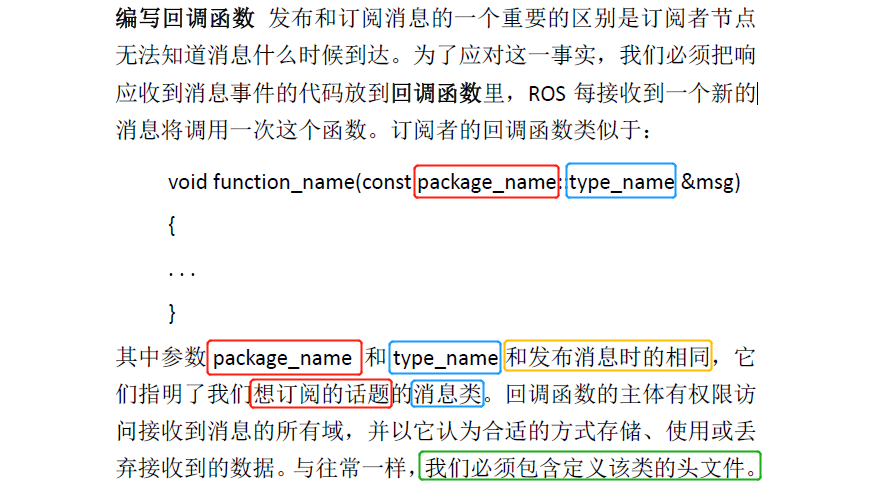
Topic接收是通过NodeHandle的成员函数subscribe()和自定义的回调函数实现的,同时回调函数有严格的定义规定:参数只能有一个且必须以const修饰、参数类型为xxxConstPtr、参数为引用传递、函数没有返回值。这就意味着单纯的回调函数几乎无法同外界做任何直接的数据交换,数据只能在它内部处理,除了保存到文件以外,其它没有办法输出数据。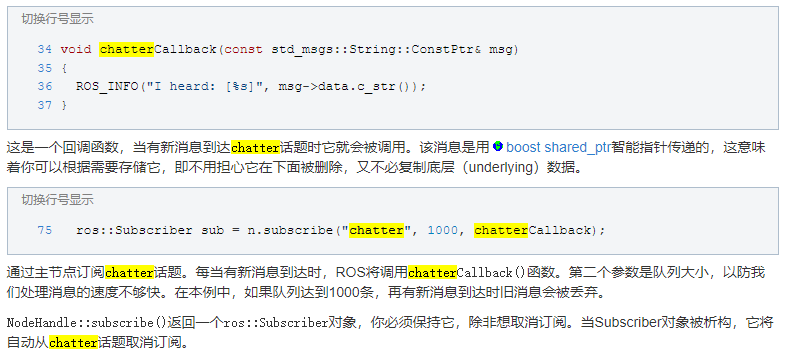
参考ROS_WIKI:http://wiki.ros.org/cn/ROS/Tutorials/WritingPublisherSubscriber%28c%2B%2B%29
参考博文:【ros】ros的订阅的回调函数所属线程
版权声明:本文为weixin_43297891原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。