优先级翻转
互斥信号量概念及其应用
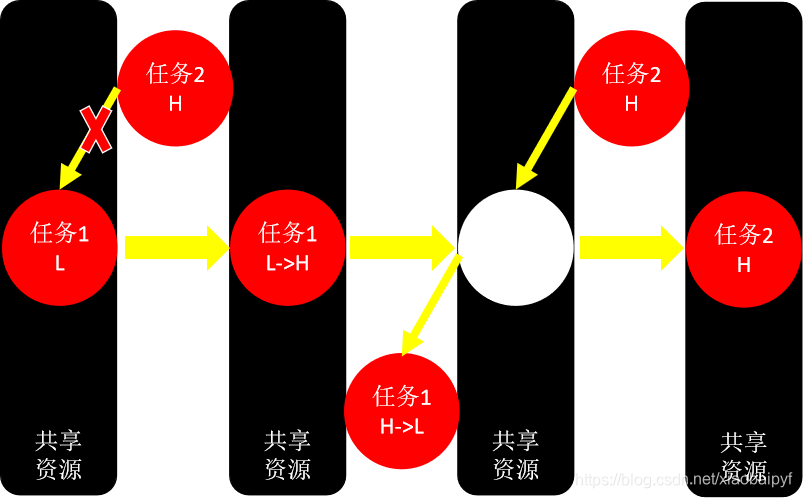
一、解决优先级翻转的问题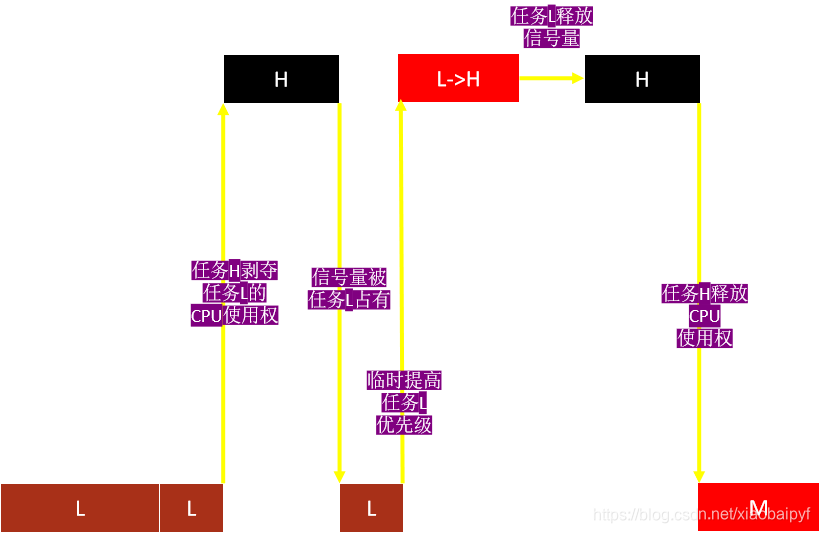
当高优先级任务去剥夺了低优先级任务的cpu使用权时,信号量如果被低优先级任务占有,高优先级任务处于阻塞态,临时提高低优先级任务的优先级。——互斥信号量的第一个特性
二值信号量一般用于信号同步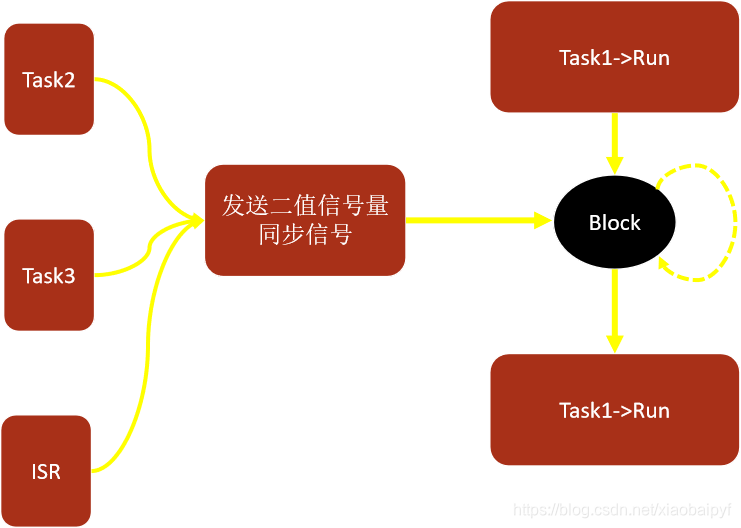
二值信号量主要做一些信号同步,任何一个任务都可以发送二值信号量,同时解除一个等待获取的任务的阻塞状态。1,只适合用于同步,2、二值信号量不是单个任务独有。
任务独占资源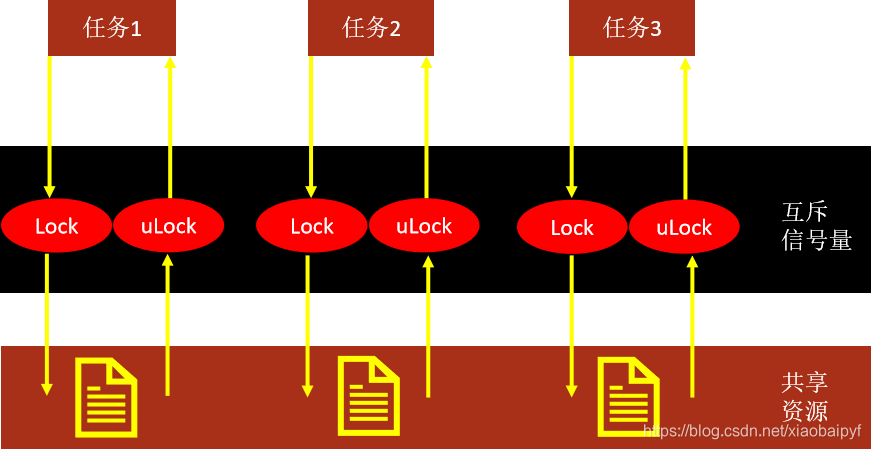
互斥信号量的两个特性:
1、优先级继承
2、任务独占资源(这个资源是指什么资源?CPU使用权?)
FreeRTOS互斥信号量
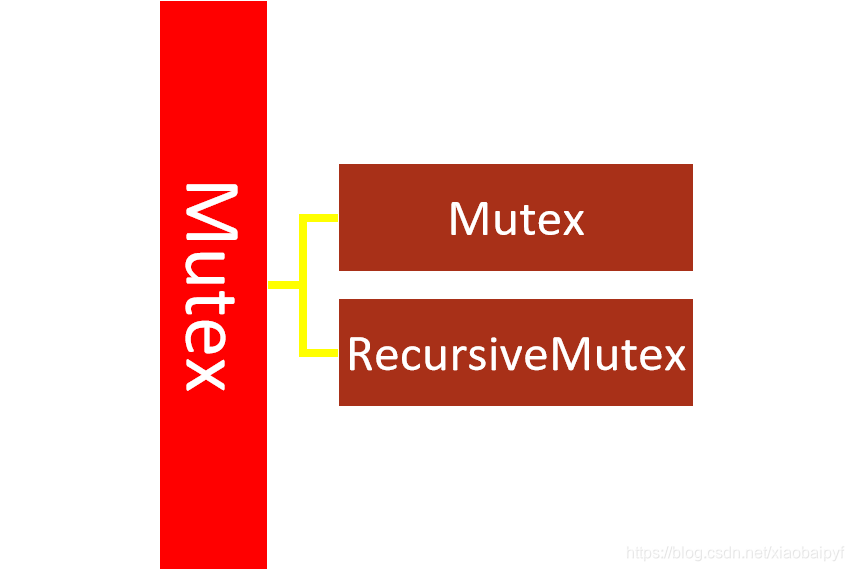
mutex:常规信号量 ——隐患:会死锁
recursivemutex:递归的互斥信号量:解决死锁。
互斥信号量工作原理
递归互斥信号量解决死锁问题
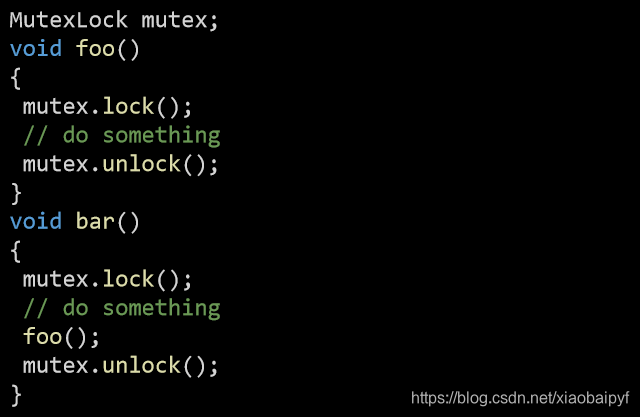
普通互斥信号量锁死问题:当第一次使用互斥信号量的时候,如果再次使用互斥信号量,就相当于函数把自己挂起。互斥信号量只能在自己的任务中被使用被释放。调用两次就会一直处于阻塞状态。
递归互斥信号量解决死锁问题
互斥信号量函数应用
实验解决优先级翻转
功能需求:
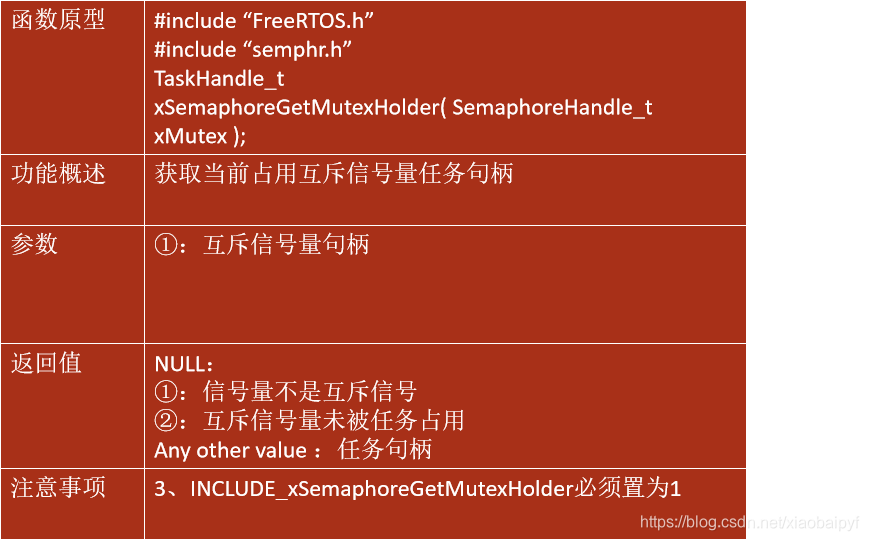
API详解
xSemaphoreCreateMutex()
xSemaphoreGetMutexHolder()
递归互斥信号量函数应用
死锁现象:
2、API
xSemaphoreCreateRecursiveMutex()
xSemaphoreTakeRecursive()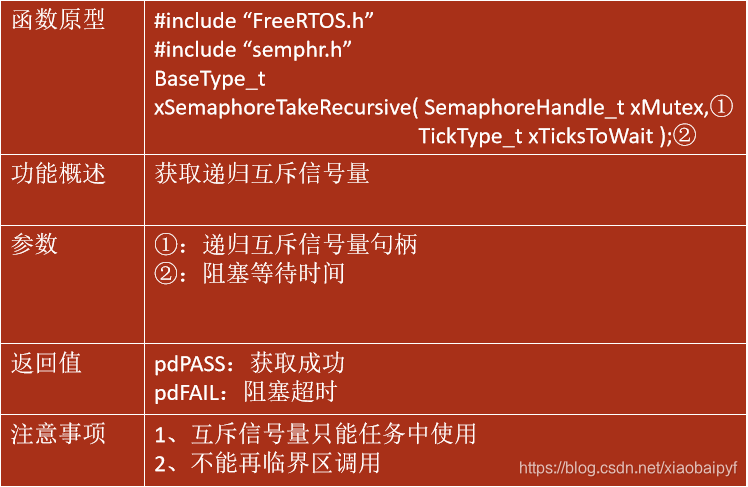
xSemaphoreGiveRecursive()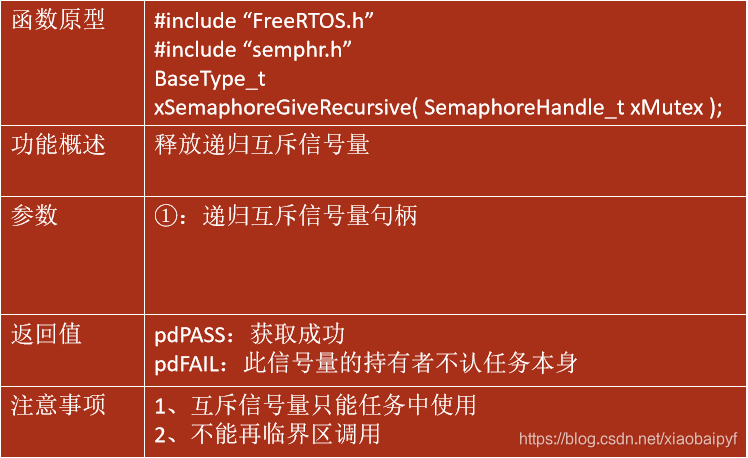
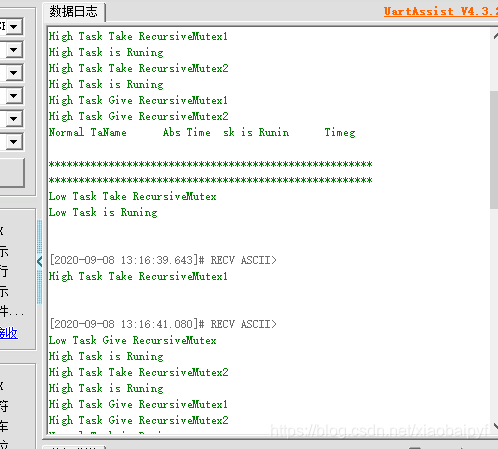
实验验证()
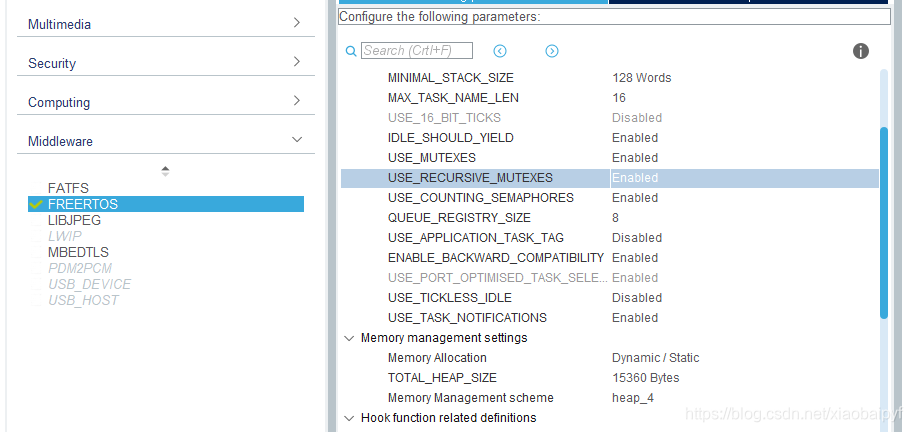
使能USE_RECURSIVE_UTEXES()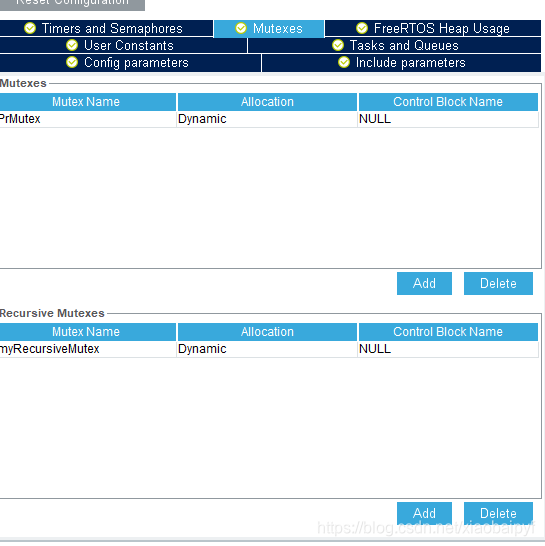
创建递归信号量
高优先级任务
void High_Task(void const * argument)
{
/* USER CODE BEGIN High_Task */
/* Infinite loop */
for(;;)
{
printf("High Task Take RecursiveMutex1\r\n");
if(xSemaphoreTakeRecursive(myRecursiveMutexHandle,portMAX_DELAY) == pdPASS){
printf("High Task is Runing\r\n");
}
printf("High Task Take RecursiveMutex2\r\n");
if(xSemaphoreTakeRecursive(myRecursiveMutexHandle,portMAX_DELAY) == pdPASS){
printf("High Task is Runing\r\n");
}
printf("High Task Give RecursiveMutex1\r\n");
xSemaphoreGiveRecursive(myRecursiveMutexHandle);
printf("High Task Give RecursiveMutex2\r\n");
xSemaphoreGiveRecursive(myRecursiveMutexHandle);
osDelay(500);
}
/* USER CODE END High_Task */
}
中等优先级任务
void Led_Task(void const * argument)
{
/* USER CODE BEGIN Led_Task */
/* Infinite loop */
for(;;)
{
printf("Normal Task is Runing\r\n");
osDelay(500);//1ms时基
}
/* USER CODE END Led_Task */
}
低优先级任务
void Delay_Task(void const * argument)
{
/* USER CODE BEGIN Delay_Task */
uint32_t i;
/* Infinite loop */
for(;;)
{
printf("Low Task Take RecursiveMutex\r\n");
if(xSemaphoreTakeRecursive(myRecursiveMutexHandle,portMAX_DELAY) == pdPASS){
printf("Low Task is Runing\r\n");
}
for(i=0;i<2000000;i++){
taskYIELD();
}
printf("Low Task Give RecursiveMutex\r\n");
xSemaphoreGiveRecursive(myRecursiveMutexHandle);
osDelay(500);
}
/* USER CODE END Delay_Task */
}
互斥信号量的原理
互斥信号量的创建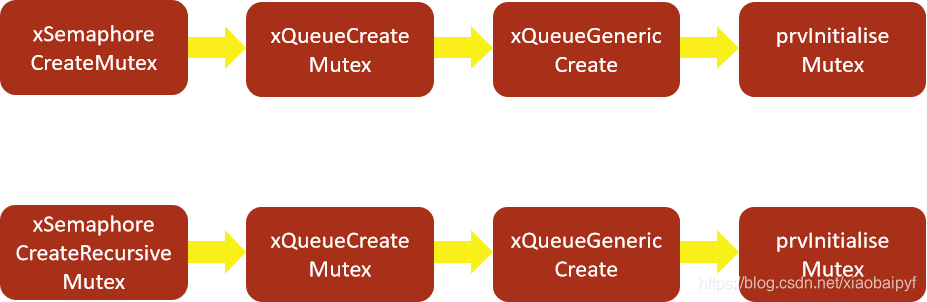
互斥信号量初始化
#if( configSUPPORT_DYNAMIC_ALLOCATION == 1 )
#define xSemaphoreCreateMutex()
xQueueCreateMutex( queueQUEUE_TYPE_MUTEX )
#endif
QueueHandle_t xQueueCreateMutex( const uint8_t ucQueueType )
{
Queue_t *pxNewQueue;
const UBaseType_t uxMutexLength = ( UBaseType_t ) 1, uxMutexSize = ( UBaseType_t ) 0;
//创建消息队列
/*
队列长度:1
队列大小:0
队列类型:queueQUEUE_TYPE_MUTEX
*/
pxNewQueue = ( Queue_t * ) xQueueGenericCreate( uxMutexLength, uxMutexSize, ucQueueType );
//初始化互斥信号量->其实就是初始化消息队列的控制块
prvInitialiseMutex( pxNewQueue );
return pxNewQueue;
}
static void prvInitialiseMutex( Queue_t *pxNewQueue )
{
if( pxNewQueue != NULL )
{
/*
1.信号量的持有者为空
2.消息队列的类型为互斥信号量
3.递归记录初始为0
4.往消息队列发送一个消息->其实赋值互斥信号量为1
*/
pxNewQueue->pxMutexHolder = NULL;
pxNewQueue->uxQueueType = queueQUEUE_IS_MUTEX;
/* In case this is a recursive mutex. */
pxNewQueue->u.uxRecursiveCallCount = 0;
traceCREATE_MUTEX( pxNewQueue );
/* Start with the semaphore in the expected state. */
( void ) xQueueGenericSend( pxNewQueue, NULL, ( TickType_t ) 0U, queueSEND_TO_BACK );
}
else
{
traceCREATE_MUTEX_FAILED();
}
}
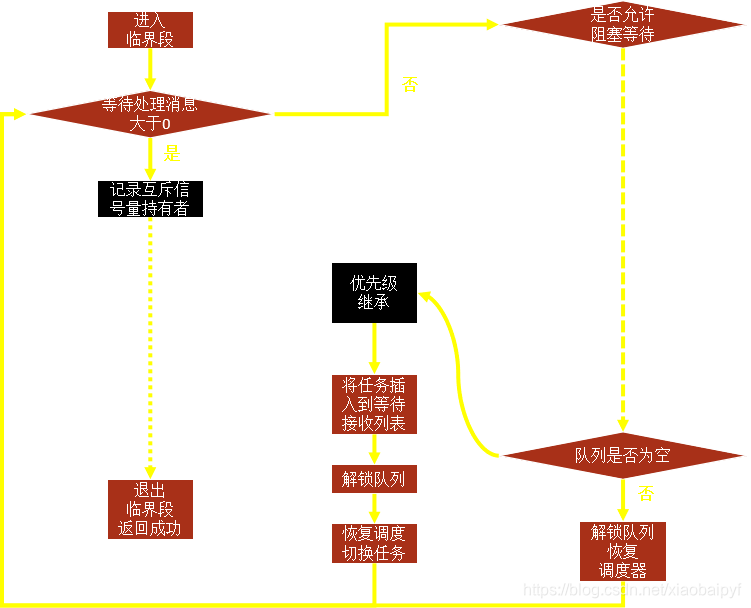
互斥信号量获取
//互斥信号量的获取
#define xSemaphoreTake( xSemaphore, xBlockTime )
xQueueGenericReceive( ( QueueHandle_t ) ( xSemaphore ), NULL, ( xBlockTime ), pdFALSE )
BaseType_t xQueueGenericReceive( QueueHandle_t xQueue, void * const pvBuffer, TickType_t xTicksToWait, const BaseType_t xJustPeeking )
{
BaseType_t xEntryTimeSet = pdFALSE;
TimeOut_t xTimeOut;
int8_t *pcOriginalReadPosition;
Queue_t * const pxQueue = ( Queue_t * ) xQueue;
#if ( ( INCLUDE_xTaskGetSchedulerState == 1 ) || ( configUSE_TIMERS == 1 ) )
{
configASSERT( !( ( xTaskGetSchedulerState() == taskSCHEDULER_SUSPENDED ) && ( xTicksToWait != 0 ) ) );
}
#endif
/* This function relaxes the coding standard somewhat to allow return
statements within the function itself. This is done in the interest
of execution time efficiency. */
for( ;; )
{
//进入临界段
taskENTER_CRITICAL();
{
const UBaseType_t uxMessagesWaiting = pxQueue->uxMessagesWaiting;
/* 判断等待处理的消息是否大于0 */
if( uxMessagesWaiting > ( UBaseType_t ) 0 )
{
pcOriginalReadPosition = pxQueue->u.pcReadFrom;
prvCopyDataFromQueue( pxQueue, pvBuffer );
//队列不为空
if( xJustPeeking == pdFALSE )
{
traceQUEUE_RECEIVE( pxQueue );
/* Actually removing data, not just peeking. */
pxQueue->uxMessagesWaiting = uxMessagesWaiting - 1;
/*
1.判断是否为互斥信号量
2.记录当前任务为信号量持有者
*/
#if ( configUSE_MUTEXES == 1 )
{
/*判断消息队列类型是否为互斥信号量*/
if( pxQueue->uxQueueType == queueQUEUE_IS_MUTEX )
{
/* 2.记录当前任务为信号量持有者 */
pxQueue->pxMutexHolder = ( int8_t * ) pvTaskIncrementMutexHeldCount(); /*lint !e961 Cast is not redundant as TaskHandle_t is a typedef. */
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
#endif /* configUSE_MUTEXES */
if( listLIST_IS_EMPTY( &( pxQueue->xTasksWaitingToSend ) ) == pdFALSE )
{
if( xTaskRemoveFromEventList( &( pxQueue->xTasksWaitingToSend ) ) != pdFALSE )
{
queueYIELD_IF_USING_PREEMPTION();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
else
{
traceQUEUE_PEEK( pxQueue );
/* The data is not being removed, so reset the read
pointer. */
pxQueue->u.pcReadFrom = pcOriginalReadPosition;
/* The data is being left in the queue, so see if there are
any other tasks waiting for the data. */
if( listLIST_IS_EMPTY( &( pxQueue->xTasksWaitingToReceive ) ) == pdFALSE )
{
if( xTaskRemoveFromEventList( &( pxQueue->xTasksWaitingToReceive ) ) != pdFALSE )
{
/* The task waiting has a higher priority than this task. */
queueYIELD_IF_USING_PREEMPTION();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
taskEXIT_CRITICAL();
return pdPASS;
}
else
{
if( xTicksToWait == ( TickType_t ) 0 )
{
/* The queue was empty and no block time is specified (or
the block time has expired) so leave now. */
taskEXIT_CRITICAL();
traceQUEUE_RECEIVE_FAILED( pxQueue );
return errQUEUE_EMPTY;
}
else if( xEntryTimeSet == pdFALSE )
{
/* The queue was empty and a block time was specified so
configure the timeout structure. */
vTaskSetTimeOutState( &xTimeOut );
xEntryTimeSet = pdTRUE;
}
else
{
/* Entry time was already set. */
mtCOVERAGE_TEST_MARKER();
}
}
}
taskEXIT_CRITICAL();
/* Interrupts and other tasks can send to and receive from the queue
now the critical section has been exited. */
vTaskSuspendAll();
prvLockQueue( pxQueue );
/* Update the timeout state to see if it has expired yet. */
if( xTaskCheckForTimeOut( &xTimeOut, &xTicksToWait ) == pdFALSE )
{
if( prvIsQueueEmpty( pxQueue ) != pdFALSE )
{
traceBLOCKING_ON_QUEUE_RECEIVE( pxQueue );
//队列为空处理
/*
1.是否为互斥信号量
2.进入临界段
3.优先级继承
*/
#if ( configUSE_MUTEXES == 1 )
{
if( pxQueue->uxQueueType == queueQUEUE_IS_MUTEX )
{
taskENTER_CRITICAL();
{
vTaskPriorityInherit( ( void * ) pxQueue->pxMutexHolder );//优先级继承
}
taskEXIT_CRITICAL();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
#endif
vTaskPlaceOnEventList( &( pxQueue->xTasksWaitingToReceive ), xTicksToWait );
prvUnlockQueue( pxQueue );
if( xTaskResumeAll() == pdFALSE )
{
portYIELD_WITHIN_API();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
else
{
/* Try again. */
prvUnlockQueue( pxQueue );
( void ) xTaskResumeAll();
}
}
else
{
prvUnlockQueue( pxQueue );
( void ) xTaskResumeAll();
if( prvIsQueueEmpty( pxQueue ) != pdFALSE )
{
traceQUEUE_RECEIVE_FAILED( pxQueue );
return errQUEUE_EMPTY;
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
}
}
互斥信号量释放
#define xSemaphoreGive( xSemaphore )
xQueueGenericSend( ( QueueHandle_t ) ( xSemaphore ), NULL, semGIVE_BLOCK_TIME, queueSEND_TO_BACK )
//互斥信号量处理在数据拷贝接口中
xYieldRequired = prvCopyDataToQueue( pxQueue, pvItemToQueue, xCopyPosition );
/*
1.判断是否为互斥信号量
2.恢复任务优先级
3.信号量持有者赋值为空,也就是说,其他任务可以获取了
/*
#if ( configUSE_MUTEXES == 1 )
{
if( pxQueue->uxQueueType == queueQUEUE_IS_MUTEX )
{
/* The mutex is no longer being held. */
xReturn = xTaskPriorityDisinherit( ( void * ) pxQueue->pxMutexHolder );
pxQueue->pxMutexHolder = NULL;
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
#endif /* configUSE_MUTEXES */
记录互斥信号量持有者
任务优先级继承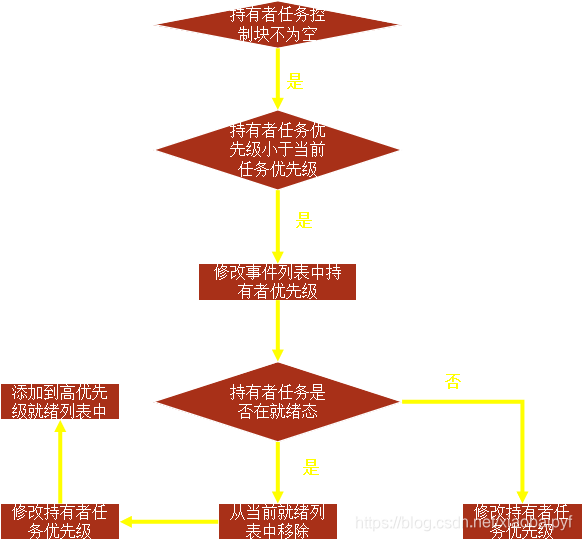
//优先级继承原理
void *pvTaskIncrementMutexHeldCount( void )
{
/* If xSemaphoreCreateMutex() is called before any tasks have been created
then pxCurrentTCB will be NULL. */
if( pxCurrentTCB != NULL )
{
//持有者任务控制块里的持有记录加一
( pxCurrentTCB->uxMutexesHeld )++;
}
//返回当前任务控制块
return pxCurrentTCB;
}
#endif /* configUSE_MUTEXES */
//优先级继承
//重点是参数:持有互斥信号量的控制块
void vTaskPriorityInherit( TaskHandle_t const pxMutexHolder )
{
TCB_t * const pxTCB = ( TCB_t * ) pxMutexHolder;
//判断任务控制块不为空
if( pxMutexHolder != NULL )
{
/* 优先级小于当前获取的信号量的有限,才会去继承*/
if( pxTCB->uxPriority < pxCurrentTCB->uxPriority )
{
/* Adjust the mutex holder state to account for its new
priority. Only reset the event list item value if the value is
not being used for anything else. */
if( ( listGET_LIST_ITEM_VALUE( &( pxTCB->xEventListItem ) ) & taskEVENT_LIST_ITEM_VALUE_IN_USE ) == 0UL )
{
//修改持有者事件列表中,列表项的属性值 为当前任务优先级
listSET_LIST_ITEM_VALUE( &( pxTCB->xEventListItem ), ( TickType_t ) configMAX_PRIORITIES - ( TickType_t ) pxCurrentTCB->uxPriority ); /*lint !e961 MISRA exception as the casts are only redundant for some ports. */
}
else
{
mtCOVERAGE_TEST_MARKER();
}
/*
4.判断持有者任务是否在就绪列表中
4.1 移除
4.2 修改任务优先级,这个修改是任务控制块里的信息
4.3 添加到新的就绪列表中
*/
if( listIS_CONTAINED_WITHIN( &( pxReadyTasksLists[ pxTCB->uxPriority ] ), &( pxTCB->xStateListItem ) ) != pdFALSE )
{
if( uxListRemove( &( pxTCB->xStateListItem ) ) == ( UBaseType_t ) 0 )
{
taskRESET_READY_PRIORITY( pxTCB->uxPriority );
}
else
{
mtCOVERAGE_TEST_MARKER();
}
/* Inherit the priority before being moved into the new list. */
pxTCB->uxPriority = pxCurrentTCB->uxPriority;
prvAddTaskToReadyList( pxTCB );
}
else
{
/* Just inherit the priority. */
pxTCB->uxPriority = pxCurrentTCB->uxPriority;
}
traceTASK_PRIORITY_INHERIT( pxTCB, pxCurrentTCB->uxPriority );
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
#endif /* configUSE_MUTEXES */```
任务优先级恢复
```c
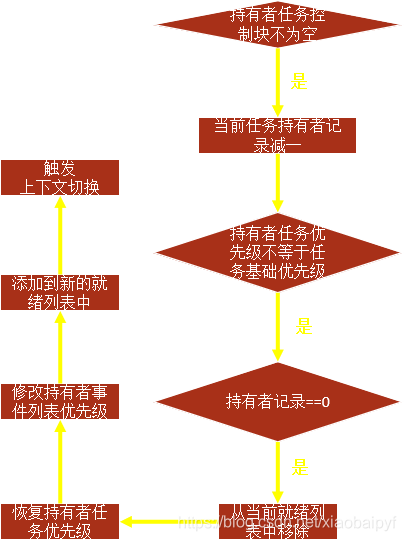
//优先级恢复
BaseType_t xTaskPriorityDisinherit( TaskHandle_t const pxMutexHolder )
{
TCB_t * const pxTCB = ( TCB_t * ) pxMutexHolder;
BaseType_t xReturn = pdFALSE;
if( pxMutexHolder != NULL )
{
//1、持有者任务持有记录减一
( pxTCB->uxMutexesHeld )--;
/* Has the holder of the mutex inherited the priority of another
task? */
//2、优先级是否修改过
if( pxTCB->uxPriority != pxTCB->uxBasePriority )
{
//3、递归记录为0的时候
/* Only disinherit if no other mutexes are held. */
if( pxTCB->uxMutexesHeld == ( UBaseType_t ) 0 )
{
/* 4、从当前的就绪列表中移除 */
if( uxListRemove( &( pxTCB->xStateListItem ) ) == ( UBaseType_t ) 0 )
{
taskRESET_READY_PRIORITY( pxTCB->uxPriority );
}
else
{
mtCOVERAGE_TEST_MARKER();
}
/* 5、恢复任务优先级 */
traceTASK_PRIORITY_DISINHERIT( pxTCB, pxTCB->uxBasePriority );
pxTCB->uxPriority = pxTCB->uxBasePriority;
/* 6、已经不是持有者,把任务添加到新的就绪列表中去 */
listSET_LIST_ITEM_VALUE( &( pxTCB->xEventListItem ), ( TickType_t ) configMAX_PRIORITIES - ( TickType_t ) pxTCB->uxPriority ); /*lint !e961 MISRA exception as the casts are only redundant for some ports. */
prvAddTaskToReadyList( pxTCB );
/* 7、触发上下文切换,释放CPU的使用权 */
xReturn = pdTRUE;
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
else
{
mtCOVERAGE_TEST_MARKER();
}
return xReturn;
}
#endif /* configUSE_MUTEXES */
递归信号量的获取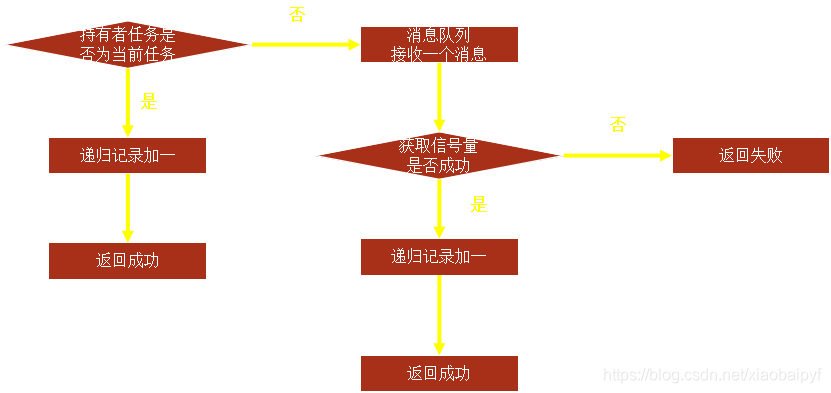
#if( configUSE_RECURSIVE_MUTEXES == 1 )
#define xSemaphoreTakeRecursive( xMutex, xBlockTime )
xQueueTakeMutexRecursive( ( xMutex ), ( xBlockTime ) )
#endif
/*
参数:互斥信号量句柄,超时等待时间
*/
BaseType_t xQueueTakeMutexRecursive( QueueHandle_t xMutex, TickType_t xTicksToWait )
{
BaseType_t xReturn;
Queue_t * const pxMutex = ( Queue_t * ) xMutex;
//判断是否为持有者
/*
如果为持有者
递归记录加一
返回成功
*/
if( pxMutex->pxMutexHolder == ( void * ) xTaskGetCurrentTaskHandle() ) /*lint !e961 Cast is not redundant as TaskHandle_t is a typedef. */
{
( pxMutex->u.uxRecursiveCallCount )++;
xReturn = pdPASS;
}
/*
不为持有者
接收消息----获取信号量
获取成功----递归记录加一
获取失败----返回错误
*/
else
{
xReturn = xQueueGenericReceive( pxMutex, NULL, xTicksToWait, pdFALSE );
if( xReturn != pdFAIL )
{
( pxMutex->u.uxRecursiveCallCount )++;
}
else
{
traceTAKE_MUTEX_RECURSIVE_FAILED( pxMutex );
}
}
return xReturn;
}
#endif /* configUSE_RECURSIVE_MUTEXES */
递归互斥信号量释放
#if( configUSE_RECURSIVE_MUTEXES == 1 )
#define xSemaphoreGiveRecursive( xMutex )
xQueueGiveMutexRecursive( ( xMutex ) )
#endif
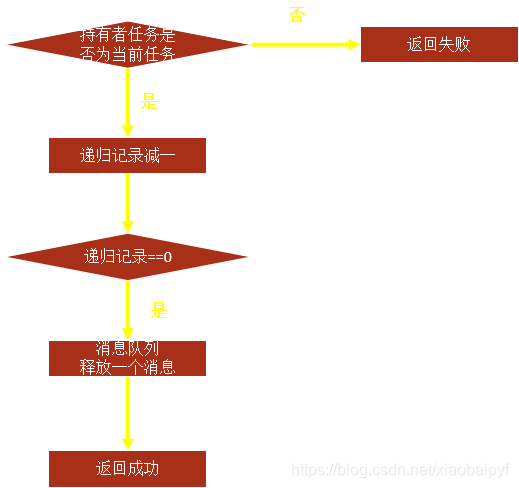
/*
参数:
信号量句柄
步骤:
1、判断当前任务是否为持有者
1.1、递归记录减一
1.2、判断记录是否为0
1.3、发送一个消息
2、不为持有者返回错误
*/
BaseType_t xQueueGiveMutexRecursive( QueueHandle_t xMutex )
{
BaseType_t xReturn;
Queue_t * const pxMutex = ( Queue_t * ) xMutex;
if( pxMutex->pxMutexHolder == ( void * ) xTaskGetCurrentTaskHandle() ) /*lint !e961 Not a redundant cast as TaskHandle_t is a typedef. */
{
( pxMutex->u.uxRecursiveCallCount )--;
/* */
if( pxMutex->u.uxRecursiveCallCount == ( UBaseType_t ) 0 )
{
/* */
( void ) xQueueGenericSend( pxMutex, NULL, queueMUTEX_GIVE_BLOCK_TIME, queueSEND_TO_BACK );
}
else
{
mtCOVERAGE_TEST_MARKER();
}
xReturn = pdPASS;
}
else
{
/* */
xReturn = pdFAIL;
}
return xReturn;
}
#endif /* configUSE_RECURSIVE_MUTEXES */
/*
版权声明:本文为xiaobaipyf原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。