连接树莓派装置。
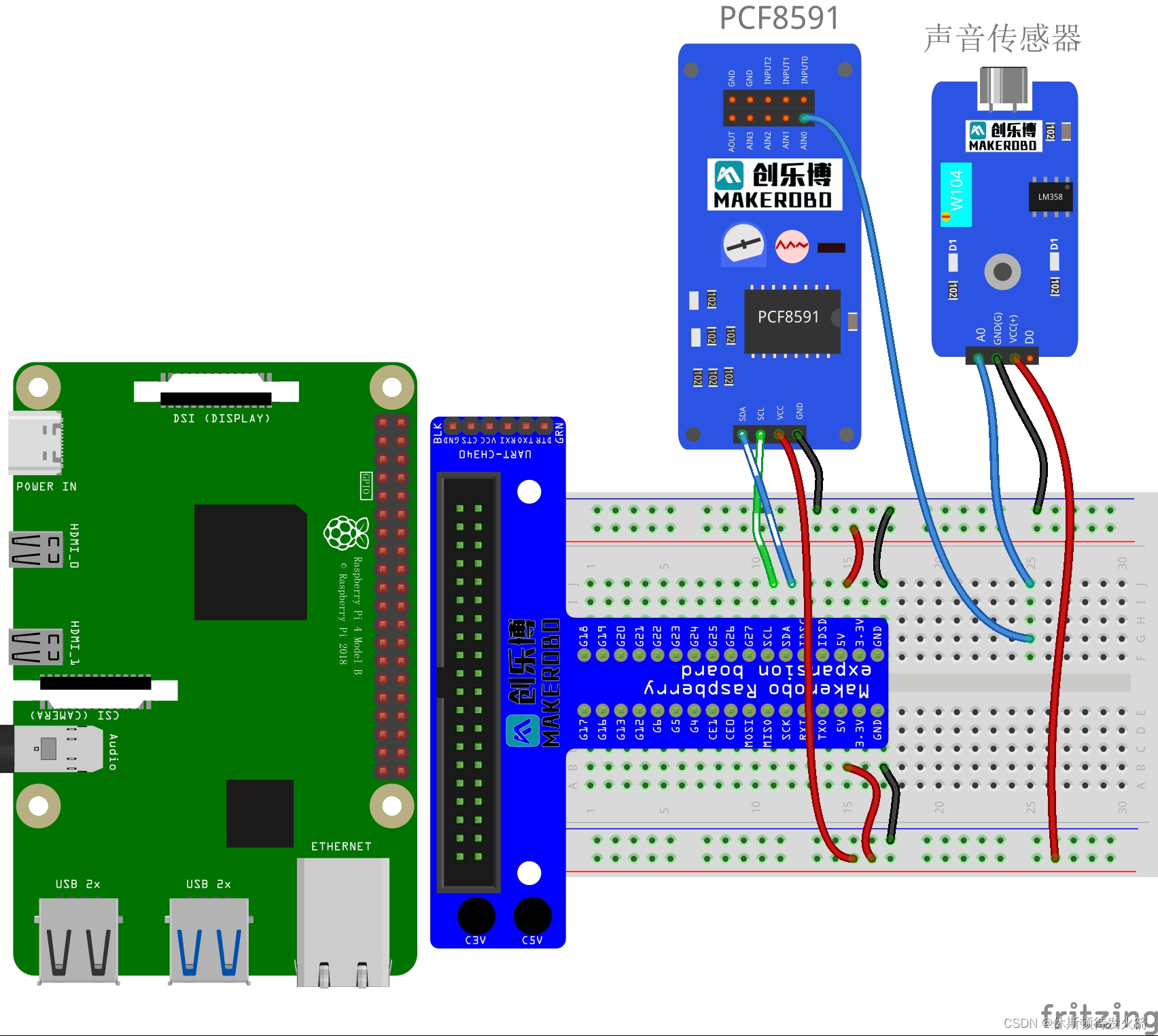

如图连接树莓派装置。
登录filezilla与树莓派进行连接。
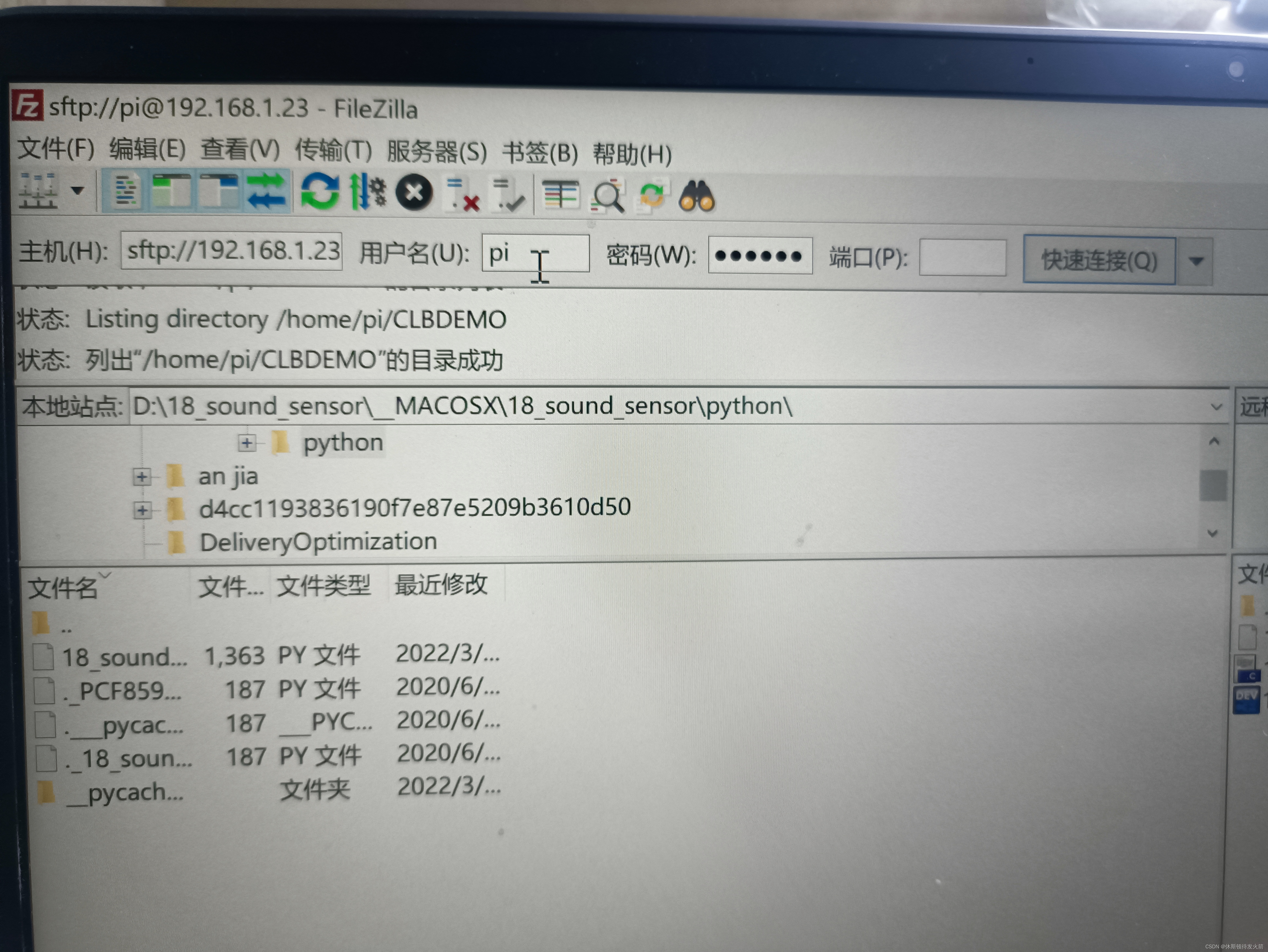
树莓派ip地址可在路由器端查询,树莓派默认用户名为pi,默认密码piraspberry。
端口设置为22。连接成功后,左端为电脑文件,右端为树莓派文件,要传文件的话,直接将所选文件双击即可传送。
建立新的文档,方便树莓派读取文件。
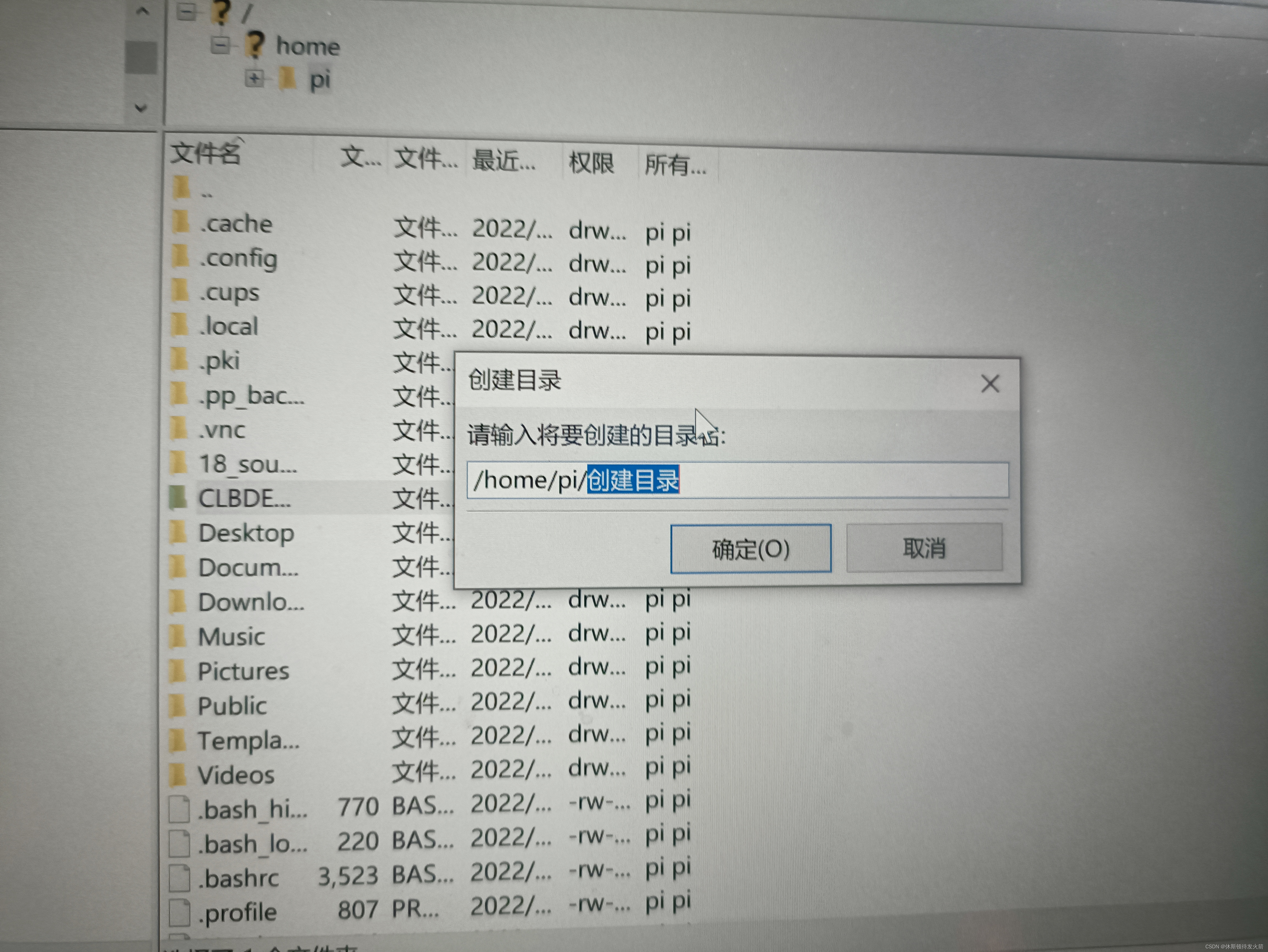
首次使用树莓派时,需要使用 FileZilla 软件在树莓派的 home 目录下的 pi 文件夹中新建一个目录,在进入pi文件夹后,单击鼠标右键,选择“创建目录”选项,然后将新文件夹命名为“CLBDEMO”,单击“确定”按钮,即可完成目录的创建。
代码。
#include <stdio.h> #include <wiringPi.h> #include <pcf8591.h> #define makerobo_PCF 120 int main (void) { int sound_value; wiringPiSetup (); pcf8591Setup (makerobo_PCE, Ox48); while(1) { sound_value = analogRead (makerobo_PCF + 0); printf("value: &d\n", sound_value); if (sound_value < 80){ printf("Makerobo Voice In! \n"); } delay(100); } return 0; }打开VCN与树莓派连接。

登录树莓派ip,默认密码为raspberry。
从文档中打开程序文件,进行编辑。





如图打开I2C设置,然后在树莓派文件中CLBDEMO打开代码文件,按照图4中红绿橙色箭头,依次点击进行编辑。
版权声明:本文为weixin_64131855原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。