【Matlab】自动整定PID参数——使用signal constraints
使用Simulink中的signal constraints模块进行PID参数整定
例



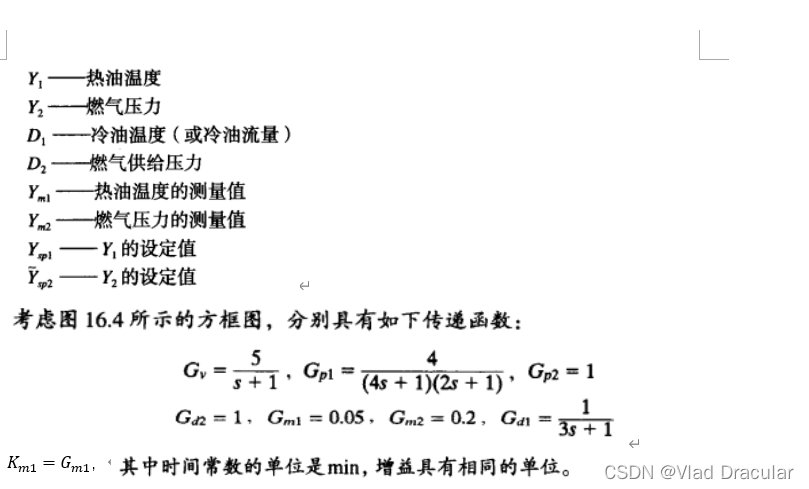
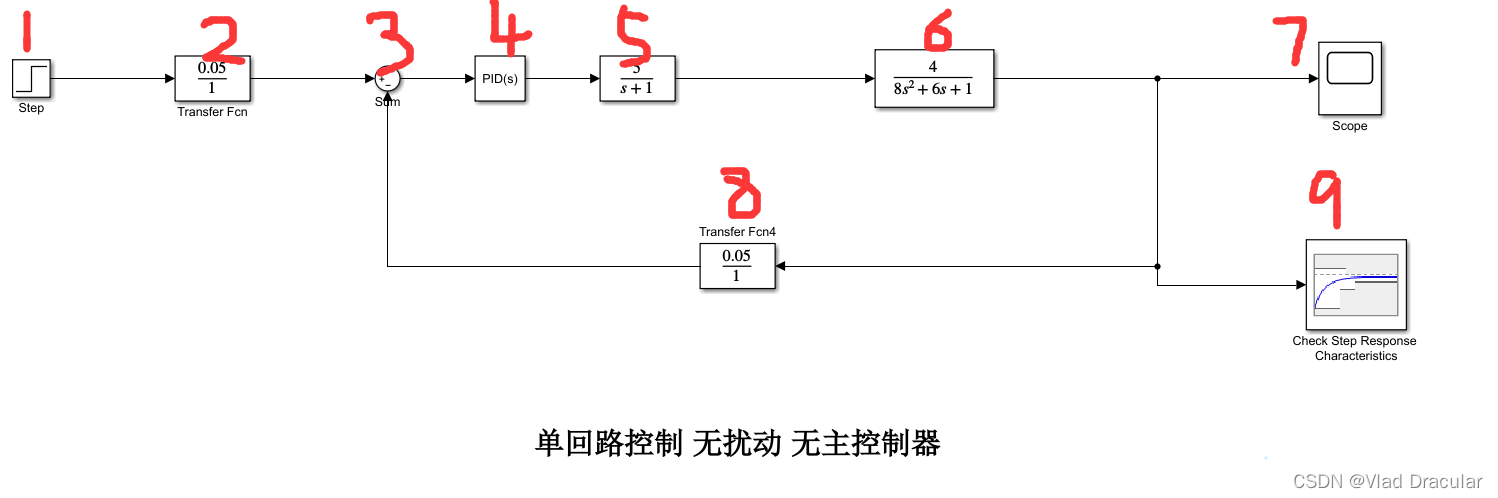
搭建单回路控制系统
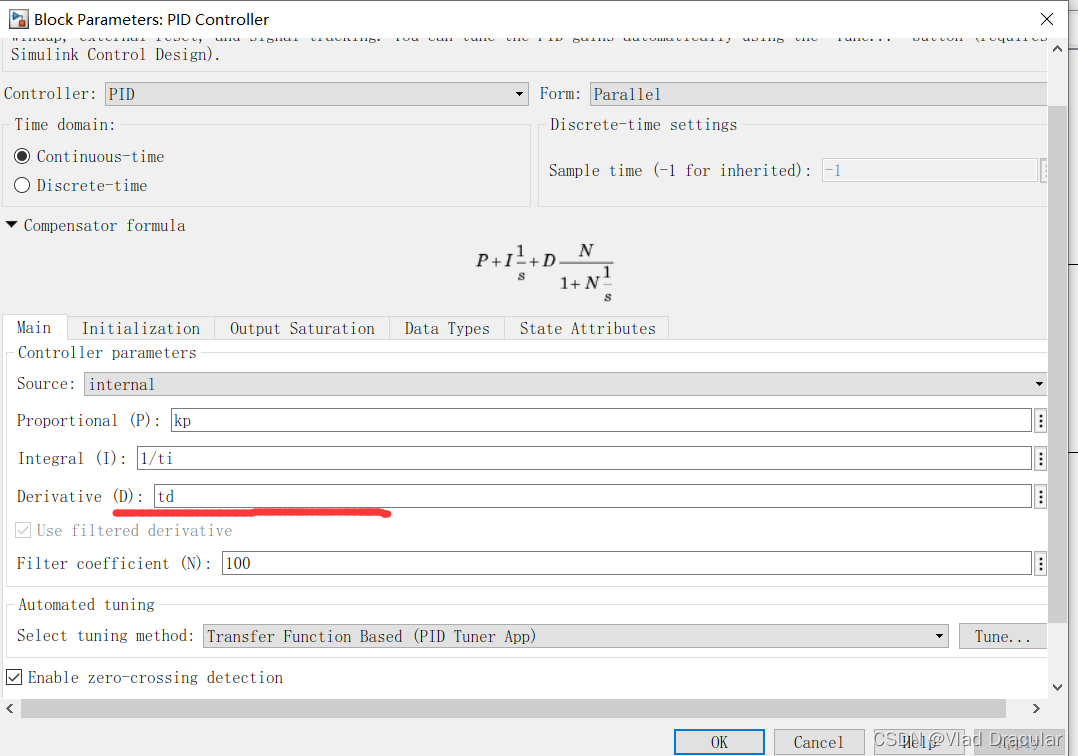
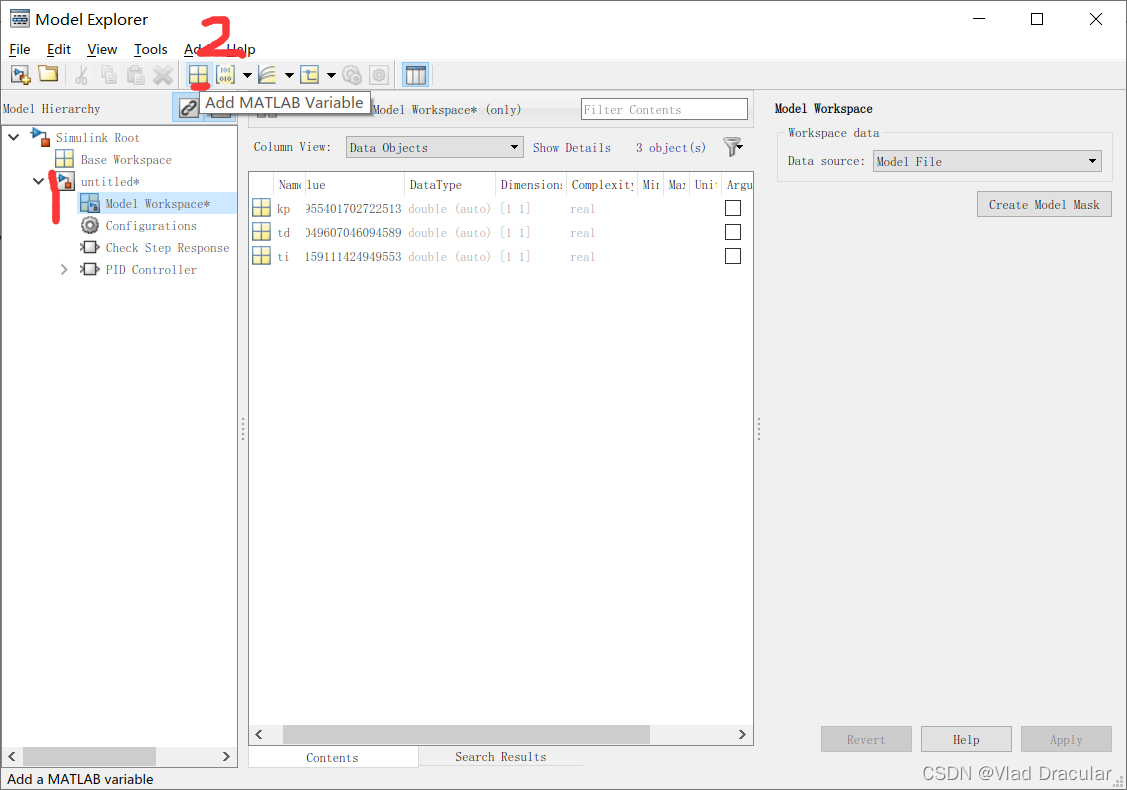
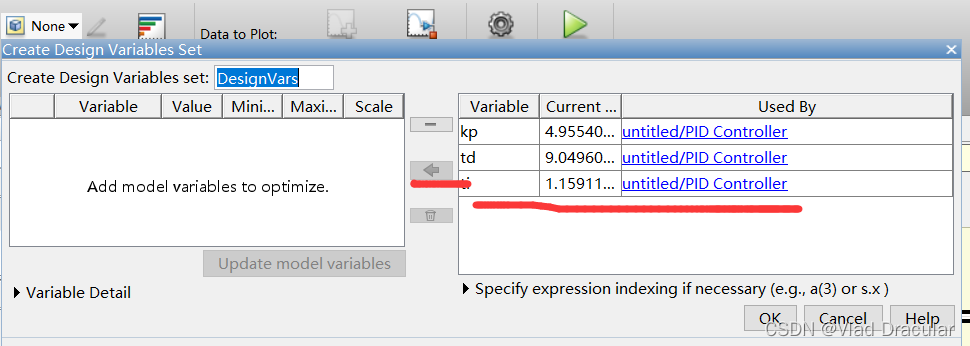
模块右键 expore 新建三个参数 kp pi pd
仿真时间改为150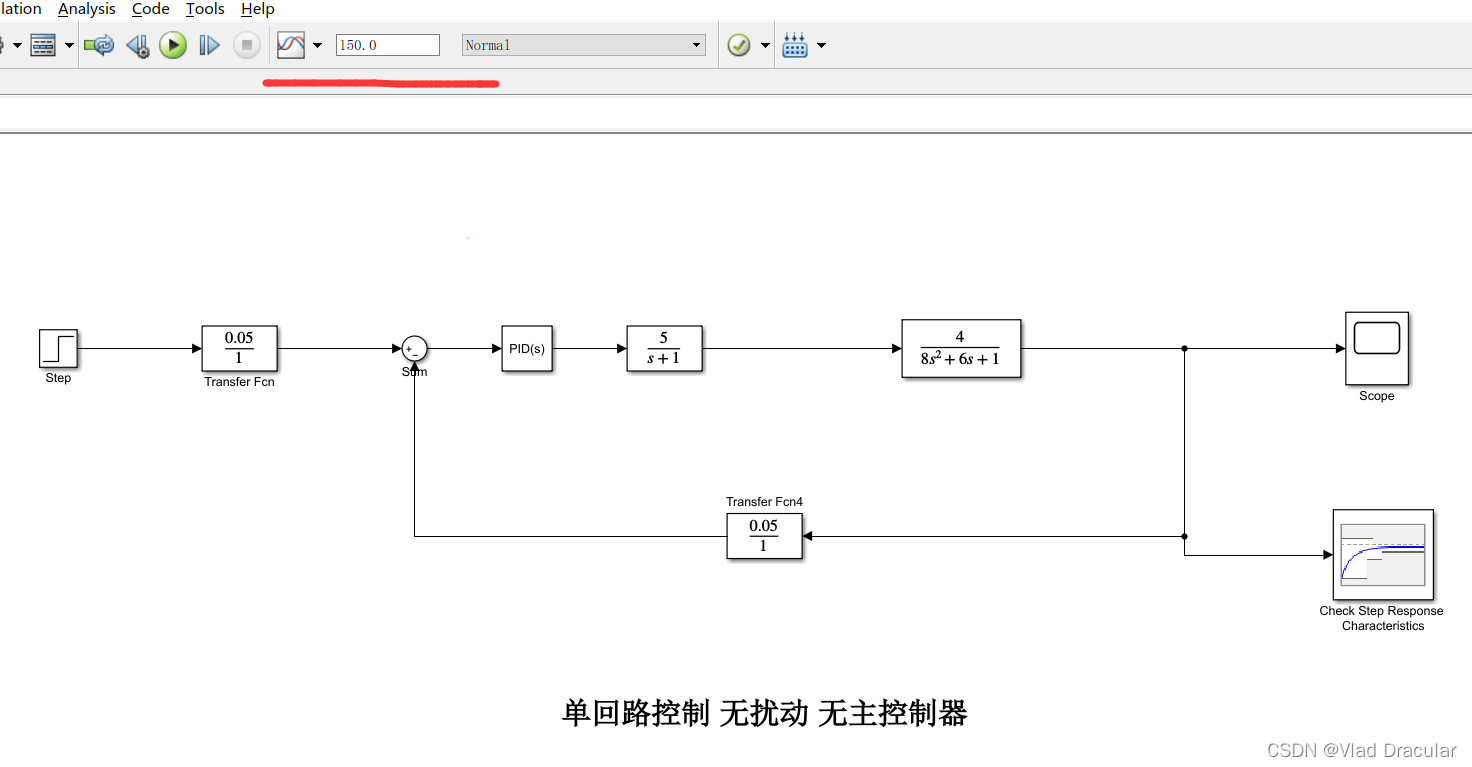
运行
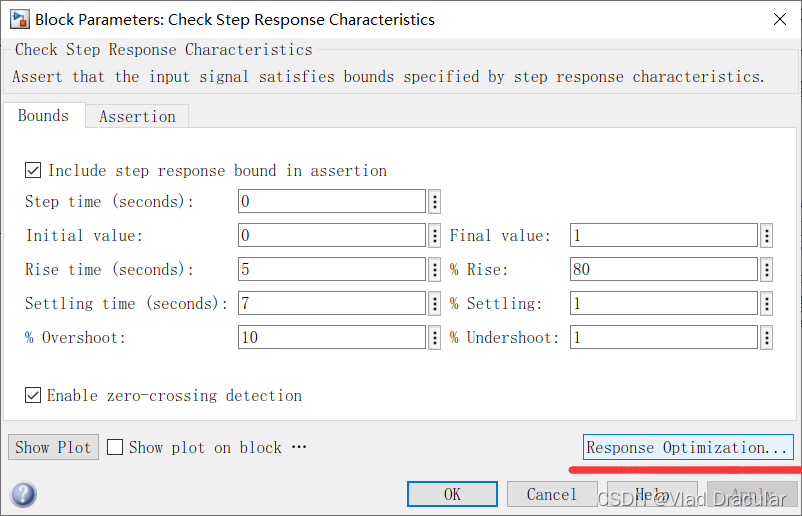
里面的参数是目标要求
依次添加三个参数
最后运行
版权声明:本文为Dracularvlad原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。
使用Simulink中的signal constraints模块进行PID参数整定
模块右键 expore 新建三个参数 kp pi pd
仿真时间改为150
运行
里面的参数是目标要求
依次添加三个参数
最后运行