参考:《现代永磁同步电机控制原理及matlab仿真》第六章
无位置传感器电机在零速和低速运行时,反电动势信号很弱,无法通过观测反电动势来判断转子位置。高频注入可以在零速和低速运行时,判断转子位置。
目前常用的方法是高频旋转电压注入法和高频脉振电压注入法。高频信号注入法利用转子凸极获取位置/转速信息,不依赖电机参数,具有较强的鲁棒性。
高频旋转正弦注入法是在 α-β 静止轴系中注入旋转电压矢量,通过检测因转子凸极导致的高频响应并解耦位置误差信号,进而实现低速/零速转子位置/转速观测。 该方法的优点是直接在静止轴系中注入高频旋转信号,因此不需要预估转子位置信息;缺点是对转子凸极具有较强的依赖性,且高频旋转矢量注入不可避免地会在转子 q 轴产生电流脉动分量,导致转矩脉动和较多的高频损耗。 此外,在位置误差信号解耦过程中,需要采用同步参考轴系滤波器( Synchronous Reference Frame Filter, SRFF) 经两次坐标变换提取含有位置信息的高频电流响应负序分量,实现过程较为复杂。
高频脉振注入法是在观测同步轴系中注入脉振电压矢量,通过检测因转子凸极导致的高频电流响应并解耦位置误差信号,进而实现低速/零速转子位置/转速观测。该方法的优点是通过在观测 d 轴注入高频信号,因此 q 轴中电流脉动分量较小且可忽略,可以避免因注入导致的转矩脉动和高频损耗。
高频脉振注入法可以采用正弦信号注入形式以及方波信号注入,其中正弦信号注入频率相对较低,通常为几百 Hz,较低的注入频率限制了 PMSM 无位置传感器控制系统动态性能的进一步提升。 脉振方波注入方式与脉振正弦注入类似,也是在观测 d 轴注入高频电压信号,能够实现更高的注入频率( 最高可达到 PWM 开关频率,采用双更新模式)。该方法相对于正弦信号注入的形式,信号处理的过程少了一些滤波器 ,计算更简单,并且由于信号频段较高,可以实现更高的动态响应能力。
下面进行高频脉振电压注入的推导:
首先建立估计转子同步旋转坐标系
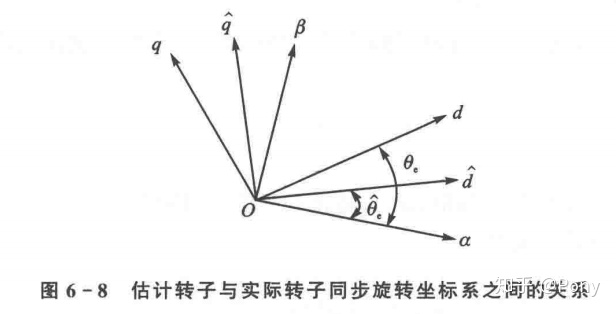
估计转子同步旋转坐标系
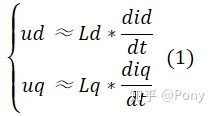
由于高频注入的信号频率一般1kHz以上,在低速段远大于基波运行频率,因此忽略定子电阻压降、反电动势的影响。高频信号激励下,三相PMSM电压方程简化为,其中ud,uq是高频注入电压:
坐标变换,估计转子同步旋转坐标系

(2)式带入(1)式:

估计转子同步旋转坐标系

(4)式带入(3)式:

极化和差:

简化:

其中ΔL=(Ld-Lq)/2 ,L=(Ld+Lq)/2。
脉振高频电压注入法,只是在估计转子同步旋转坐标系
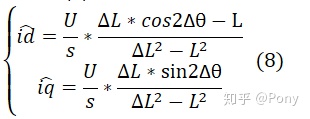
从(8)式看出,如果Ld≠Lq,则在估计转子同步旋转坐标系,高频电流dq轴分量都与转子位置估计误差角度Δθ有关,当该误差角为0时,q轴高频电流为0,因此可以对q轴高频电流进行适当的信号处理来作为转子位置观测的输入信号,以此来获得转子的位置。但是从公式上看出,角度差180°,也是可以收敛的,所以一开始要先对转子的位置进行初始位置辨识,或者简单粗暴的直接把电机先拉到α轴。
高频注入的电压信号为余弦时:
则由(8)式得到:

此时q轴高频电流是一个高频分量,需要进行幅值调制,乘上

这样就构造出一个低频分量和一个高频分量,对这个信号进行低通滤波,得到:
如果误差角足够小,可以把该误差信号线性化:
将上述的误差信号控制到0,则转子误差角度为0,即此时转子估计的角度为实际转子角度。
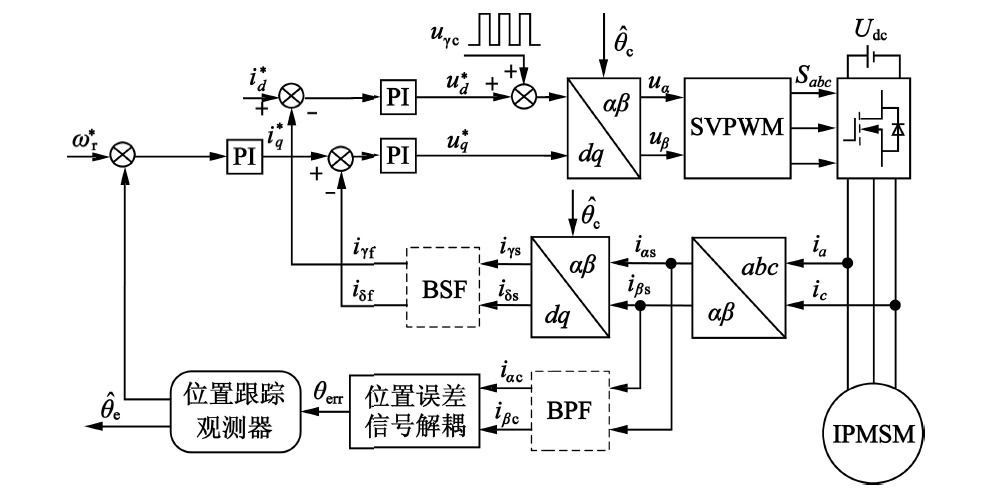
所以高频正弦电压注入的框图如下:
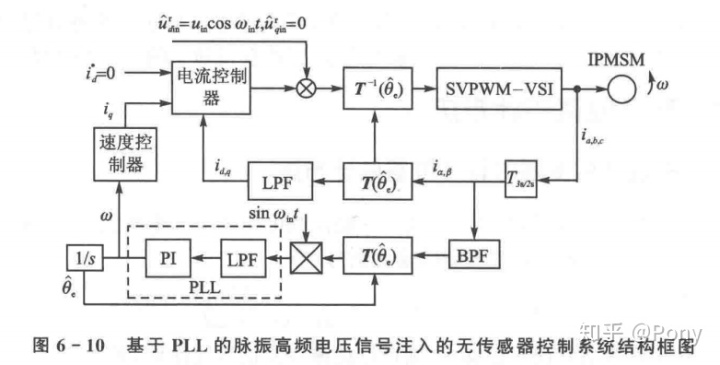
在输出的Ud上加入高频余弦电压,然后对采样的q轴电流,先进行带通滤波,通带的频率是注入的高频电压的频率,要注意的时,在通带内保持相位不变。带通滤波后的信号乘上同频率的高频正弦电压,再进行低通滤波器,滤掉高频分量,最后用PLL把低频分量控到0,就可以得到转子的位置。
(未完待更)
转载前请先联系本人。未经允许禁止转载。