点击蓝色字体加关注,猩猩用心分享每一篇好文

KUKA机器人多线程功能是怎么实现?相对于ABB机器人而言,不需要额外花费费用开通功能这一点非常值得点赞。通过提交解释器程序就可以实现多线程功能,对于一些简单项目,甚至可以不需要加装PLC。
机器人控制器上平行的执行着两个任务:
1,机器人解释器 - 运动程序通过机器人解释器执行。
2,提交解释器 - 提交程序 (SUB-Programm) 通过提交解释器执行,SUB 程序可以执行操作或者监控任务,如果是一般的简单应用,甚至可以不需要PLC。
提交解释器的特点:
1,提交解释器在机器人控制系统接通时自动启动。
2,提交解释器可以手动停止或取消选择,也可以重新启动。
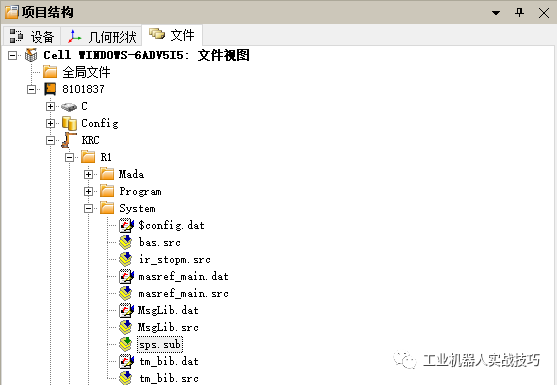
3,SUB 程序始终是带扩展名 *.SUB 的文件。可以编辑程序 SPS.SUB,可以创建其他的 SUB 程序。
提交解释器不适用场合及其原因:
警告:SUBMIT 解释器不能用于对时间要求严格的应用场合。
1,提交解释器与具有最高优先级的机器人解释器共享系统性能。因此,提交解释器不会在机器人控制系统的 12 ms 插值周期内连续运行。此外,提交解释器的运行时间也无规律可循。
2,提交解释器的运行时间受 SUB 程序行数的影响。注释行和空行对此也有影响。
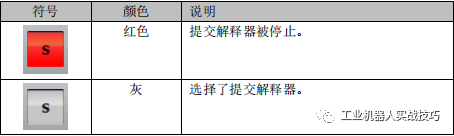
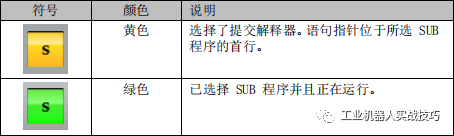
提交解释器状态:
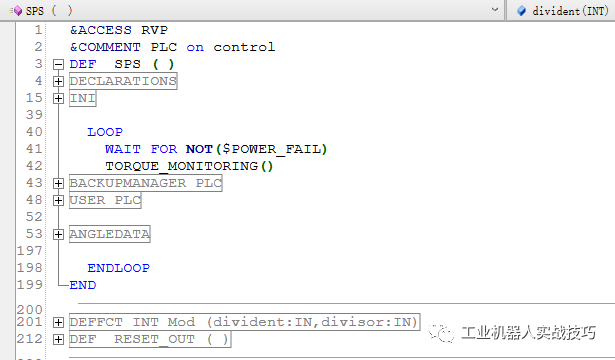
程序实例代码:
将需要执行的多线程程序,编写在sps程序内就可以上电执行。下图所示中的 INT MOD 功能块程序就是用来进行整数取模计算程序。
KUKA 多线程任务编写位置
整数取模功能块程序实例:
DEFFCT INT Mod (divident:IN,divisor:IN) DECL INT divident ;bei chu shu DECL INT divisor ;chu shu DECL INT quotient ;shang shu DECL INT remainder ;yu shu quotient=divident/divisor Angle_PLC=quotient remainder=divident-quotient*divisor RETURN remainder ENDFCT源自网络KUKA机器人取模功能块程序 - 安德鲁大神
小编太懒了,内容缓慢更新中.....
点赞,在看,打赏是对小编最大的鼓励......
往期推荐
KUKA SmartPad安装俄罗斯方块
KUKA SmartPad安装截图插件
KUKA “有壳”安装系统
KUKA 备份系统
KUKA 共享机器人硬盘文件
KUKA A6轴无限制旋转变量
KUKA 机器人的另一面-CNC功能
KUKA Workvisual添加和导出机器人数据
KUKA和福尼斯焊机EtherCAT通讯配置
KUKA.ArcTechBasic配置福尼斯焊机
KUKA EtherNet/IP通讯配置
KUKA机器人倍福EK1100模块配置
KUKA机器人Porfinet从站通讯配置
文章好看点下赞和再看呦
